 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight
Paper and Code
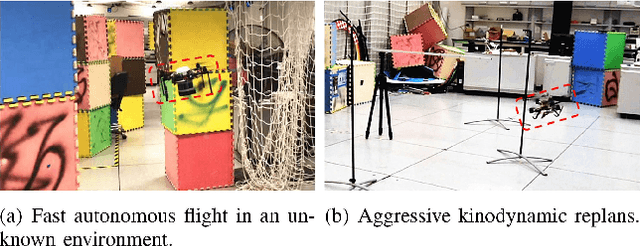
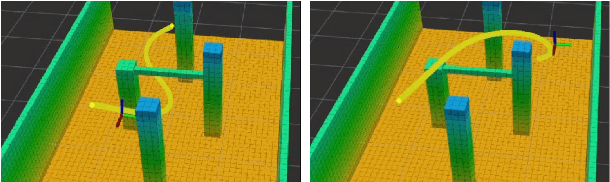
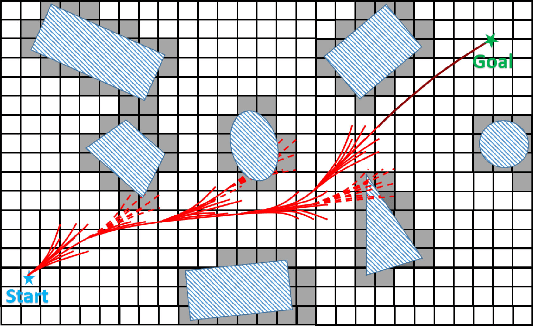
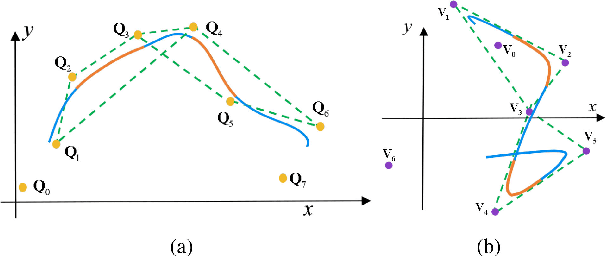
In this paper, we propose a robust and efficient quadrotor motion planning system for fast flight in 3-D complex environments. We adopt a kinodynamic path searching method to find a safe, kinodynamic feasible and minimum-time initial trajectory in the discretized control space. We improve the smoothness and clearance of the trajectory by a B-spline optimization, which incorporates gradient information from a Euclidean distance field (EDF) and dynamic constraints efficiently utilizing the convex hull property of B-spline. Finally, by representing the final trajectory as a non-uniform B-spline, an iterative time adjustment method is adopted to guarantee dynamically feasible and non-conservative trajectories. We validate our proposed method in various complex simulational environments. The competence of the method is also validated in challenging real-world tasks. We release our code as an open-source package.