 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProspection: Interpretable Plans From Language By Predicting the Future
Paper and Code
Mar 20, 2019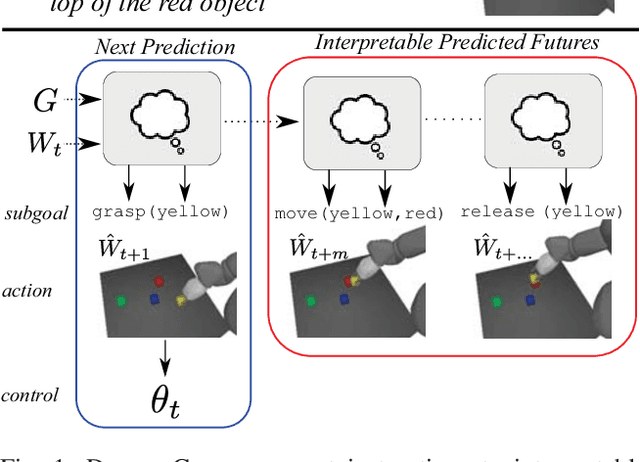

High-level human instructions often correspond to behaviors with multiple implicit steps. In order for robots to be useful in the real world, they must be able to to reason over both motions and intermediate goals implied by human instructions. In this work, we propose a framework for learning representations that convert from a natural-language command to a sequence of intermediate goals for execution on a robot. A key feature of this framework is prospection, training an agent not just to correctly execute the prescribed command, but to predict a horizon of consequences of an action before taking it. We demonstrate the fidelity of plans generated by our framework when interpreting real, crowd-sourced natural language commands for a robot in simulated scenes.