 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformative Path Planning and Mapping for Active Sensing Under Localization Uncertainty
Paper and Code
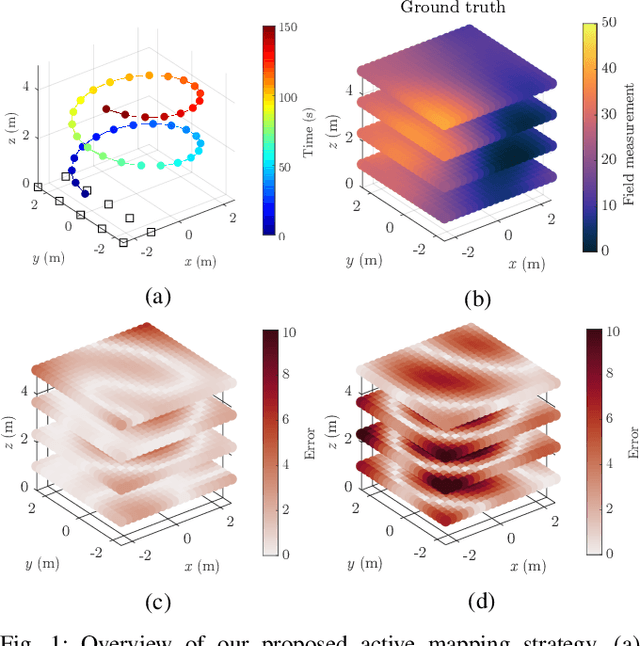
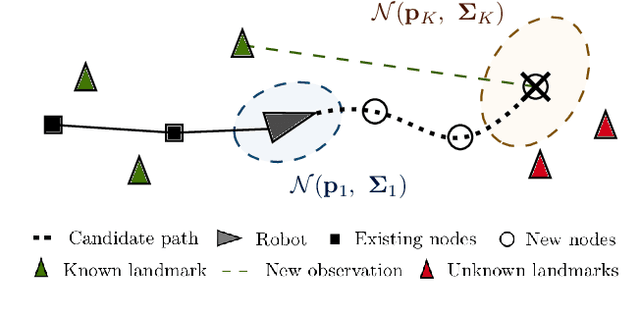
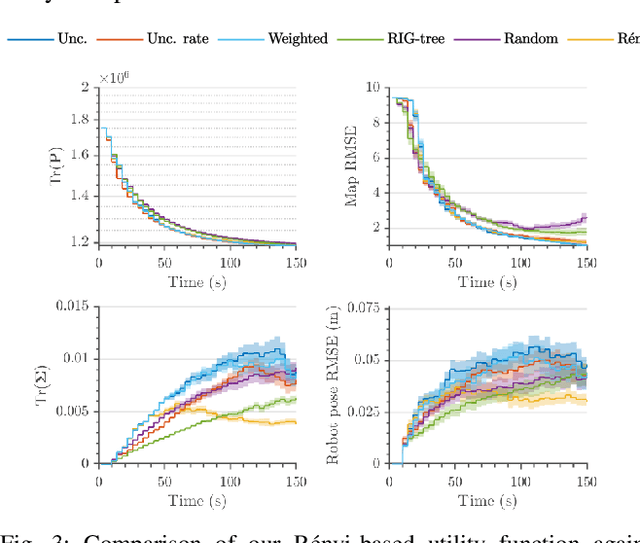
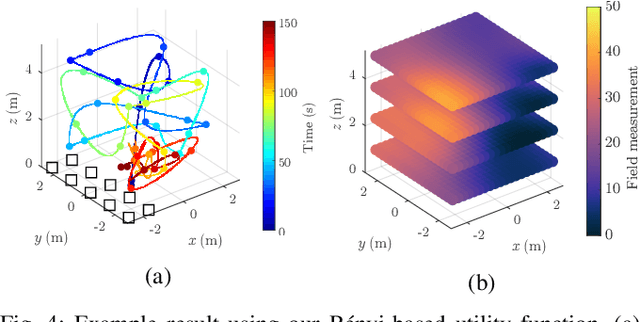
Robotic platforms are emerging as a timely and cost-efficient tool for exploration and monitoring. However, an open challenge is planning missions for robust, efficient data acquisition in complex environments. To address this issue, we introduce an informative planning framework for active sensing scenarios that accounts for the robot pose uncertainty. Our strategy exploits a Gaussian Process model to capture a target environmental field given the uncertainty on its inputs. This allows us to maintain robust maps, which are used for planning information-rich trajectories in continuous space. A key aspect of our method is a new utility function that couples the localization and field mapping objectives, enabling us to trade-off exploration against exploitation in a principled way. Extensive simulations show that our approach outperforms existing strategies, with reductions of up to 45.1% and 6.3% in mean pose uncertainty and map error. We demonstrate a proof of concept in an indoor temperature mapping scenario.