 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Human Pose Machines with Self-supervised Learning
Paper and Code
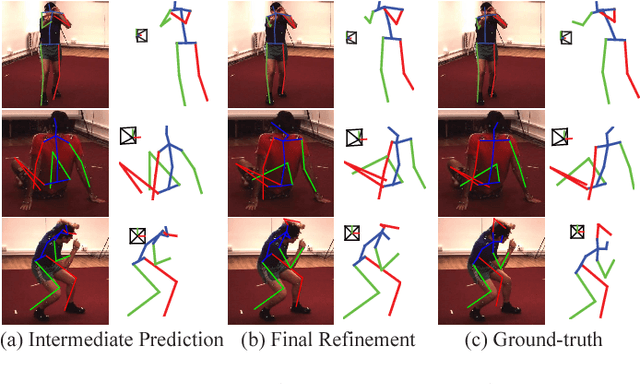

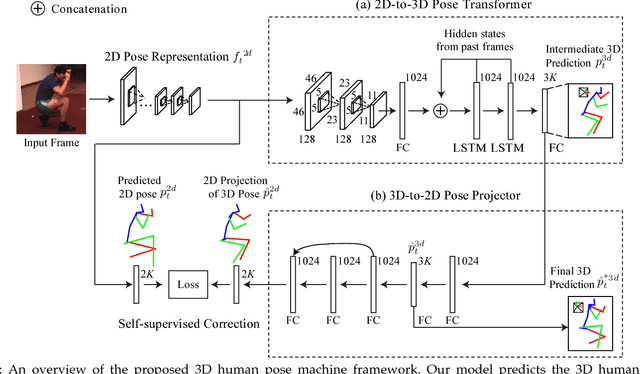
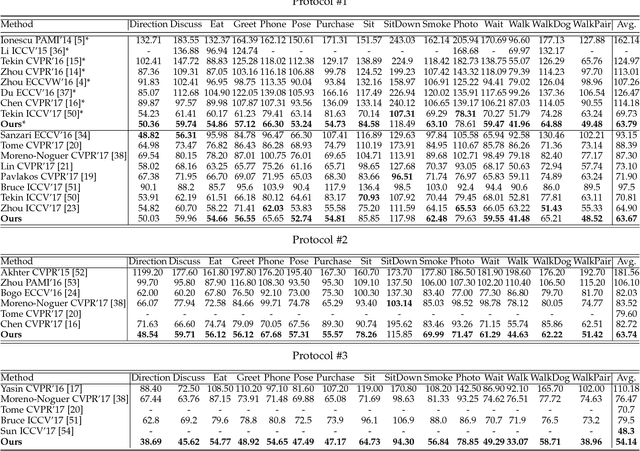
Driven by recent computer vision and robotic applications, recovering 3D human poses has become increasingly important and attracted growing interests. In fact, completing this task is quite challenging due to the diverse appearances, viewpoints, occlusions and inherently geometric ambiguities inside monocular images. Most of the existing methods focus on designing some elaborate priors /constraints to directly regress 3D human poses based on the corresponding 2D human pose-aware features or 2D pose predictions. However, due to the insufficient 3D pose data for training and the domain gap between 2D space and 3D space, these methods have limited scalabilities for all practical scenarios (e.g., outdoor scene). Attempt to address this issue, this paper proposes a simple yet effective self-supervised correction mechanism to learn all intrinsic structures of human poses from abundant images. Specifically, the proposed mechanism involves two dual learning tasks, i.e., the 2D-to-3D pose transformation and 3D-to-2D pose projection, to serve as a bridge between 3D and 2D human poses in a type of "free" self-supervision for accurate 3D human pose estimation. The 2D-to-3D pose implies to sequentially regress intermediate 3D poses by transforming the pose representation from the 2D domain to the 3D domain under the sequence-dependent temporal context, while the 3D-to-2D pose projection contributes to refining the intermediate 3D poses by maintaining geometric consistency between the 2D projections of 3D poses and the estimated 2D poses. We further apply our self-supervised correction mechanism to develop a 3D human pose machine, which jointly integrates the 2D spatial relationship, temporal smoothness of predictions and 3D geometric knowledge. Extensive evaluations demonstrate the superior performance and efficiency of our framework over all the compared competing methods.