 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWarped Hypertime Representations for Long-term Autonomy of Mobile Robots
Paper and Code
Oct 09, 2018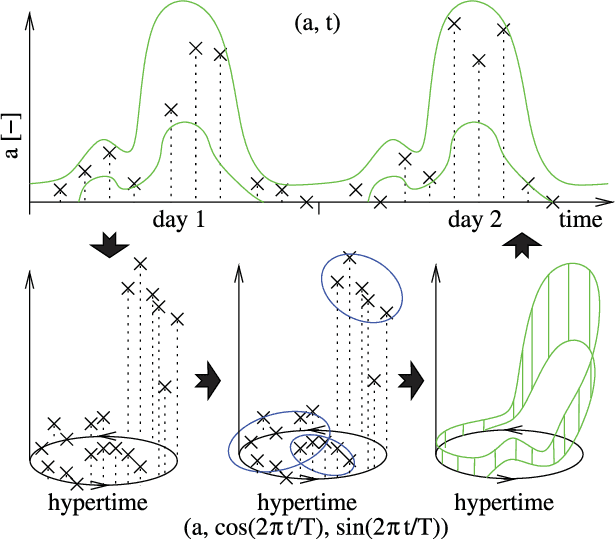
This paper presents a novel method for introducing time into discrete and continuous spatial representations used in mobile robotics, by modelling long-term, pseudo-periodic variations caused by human activities. Unlike previous approaches, the proposed method does not treat time and space separately, and its continuous nature respects both the temporal and spatial continuity of the modeled phenomena. The method extends the given spatial model with a set of wrapped dimensions that represent the periodicities of observed changes. By performing clustering over this extended representation, we obtain a model that allows us to predict future states of both discrete and continuous spatial representations. We apply the proposed algorithm to several long-term datasets and show that the method enables a robot to predict future states of repre- sentations with different dimensions. The experiments further show that the method achieves more accurate predictions than the previous state of the art.