 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMap Memorization and Forgetting in the IARA Autonomous Car
Paper and Code
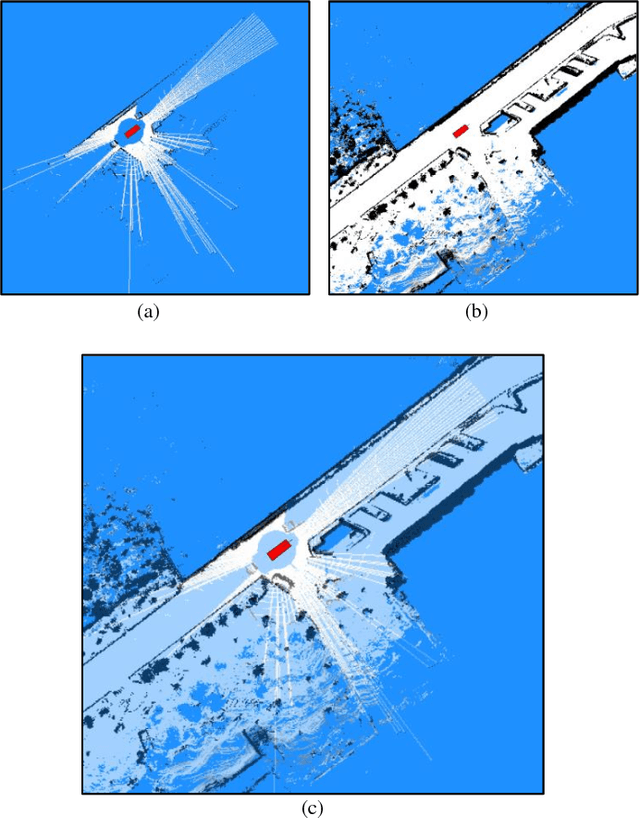
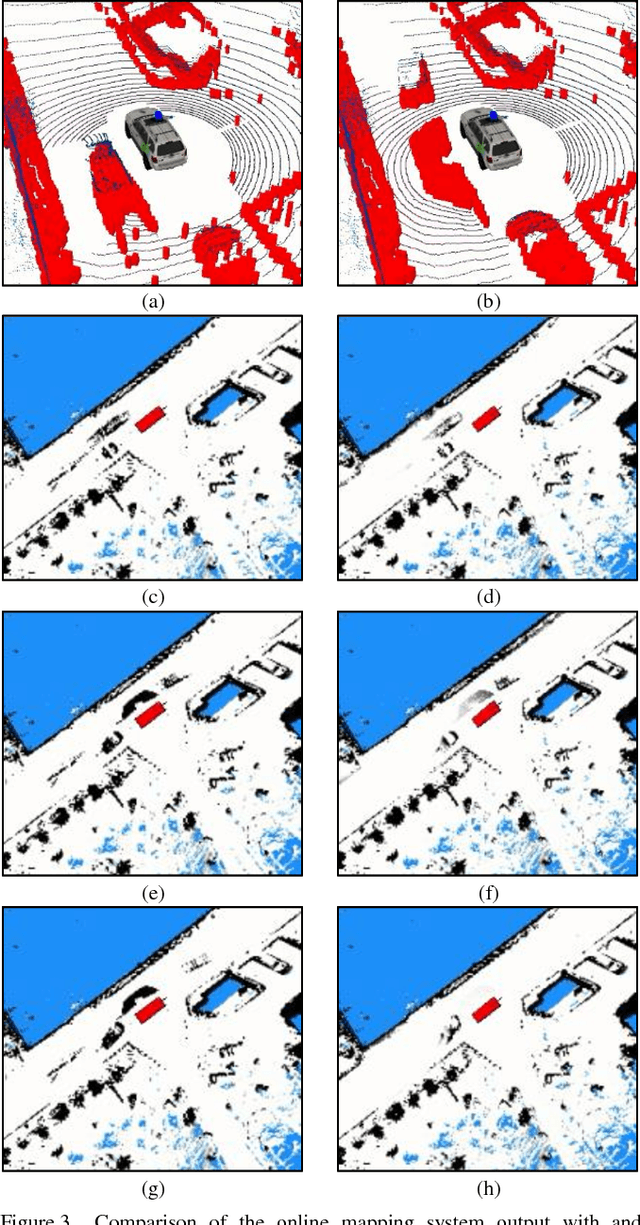
In this work, we present a novel strategy for correcting imperfections in occupancy grid maps called map decay. The objective of map decay is to correct invalid occupancy probabilities of map cells that are unobservable by sensors. The strategy was inspired by an analogy between the memory architecture believed to exist in the human brain and the maps maintained by an autonomous vehicle. It consists in merging sensory information obtained during runtime (online) with a priori data from a high-precision map constructed offline. In map decay, cells observed by sensors are updated using traditional occupancy grid mapping techniques and unobserved cells are adjusted so that their occupancy probabilities tend to the values found in the offline map. This strategy is grounded in the idea that the most precise information available about an unobservable cell is the value found in the high-precision offline map. Map decay was successfully tested and is still in use in the IARA autonomous vehicle from Universidade Federal do Esp\'irito Santo.