 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGAPLE: Generalizable Approaching Policy LEarning for Robotic Object Searching in Indoor Environment
Paper and Code
Mar 07, 2019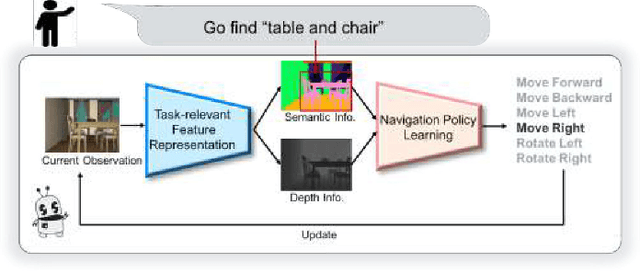
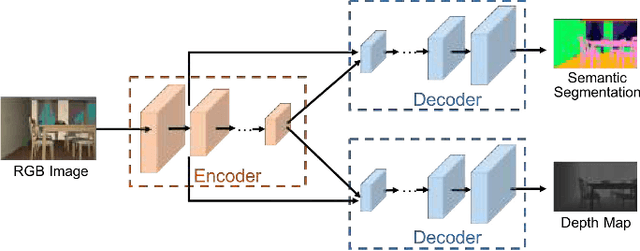
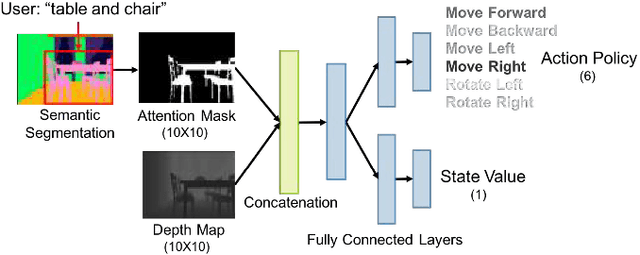
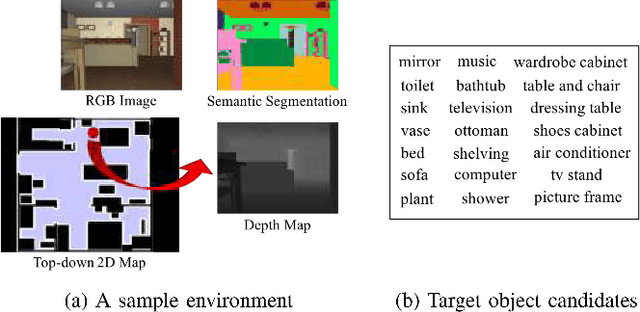
We study the problem of learning a generalizable action policy for an intelligent agent to actively approach an object of interest in an indoor environment solely from its visual inputs. While scene-driven or recognition-driven visual navigation has been widely studied, prior efforts suffer severely from the limited generalization capability. In this paper, we first argue the object searching task is environment dependent while the approaching ability is general. To learn a generalizable approaching policy, we present a novel solution dubbed as GAPLE which adopts two channels of visual features: depth and semantic segmentation, as the inputs to the policy learning module. The empirical studies conducted on the House3D dataset as well as on a physical platform in a real world scenario validate our hypothesis, and we further provide in-depth qualitative analysis.