Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Object Pose Estimation with Pose Interpreter Networks
Paper and Code
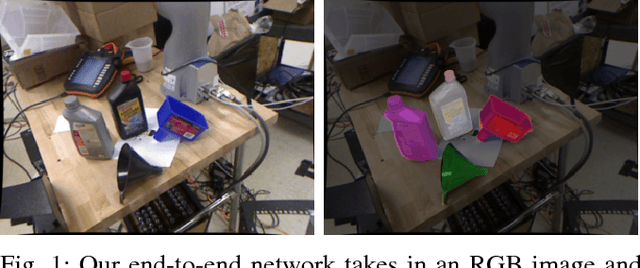
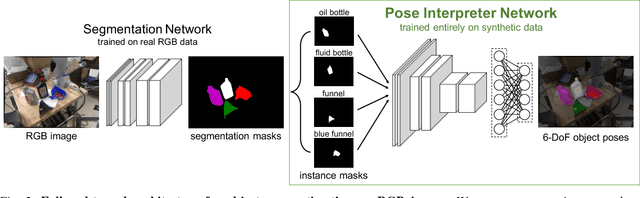
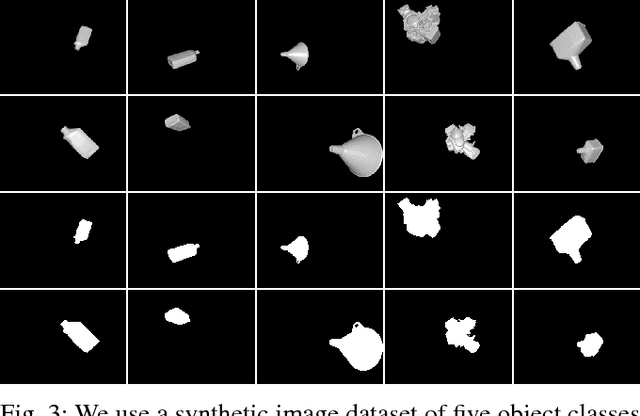
In this work, we introduce pose interpreter networks for 6-DoF object pose estimation. In contrast to other CNN-based approaches to pose estimation that require expensively annotated object pose data, our pose interpreter network is trained entirely on synthetic pose data. We use object masks as an intermediate representation to bridge real and synthetic. We show that when combined with a segmentation model trained on RGB images, our synthetically trained pose interpreter network is able to generalize to real data. Our end-to-end system for object pose estimation runs in real-time (20 Hz) on live RGB data, without using depth information or ICP refinement.
* To appear at 2018 IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS 2018). Code available at
https://github.com/jimmyyhwu/pose-interpreter-networks
View paper on