 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Continuous Conditional Random Fields with Asymmetric Inter-object Constraints for Online Multi-object Tracking
Paper and Code
Jun 04, 2018
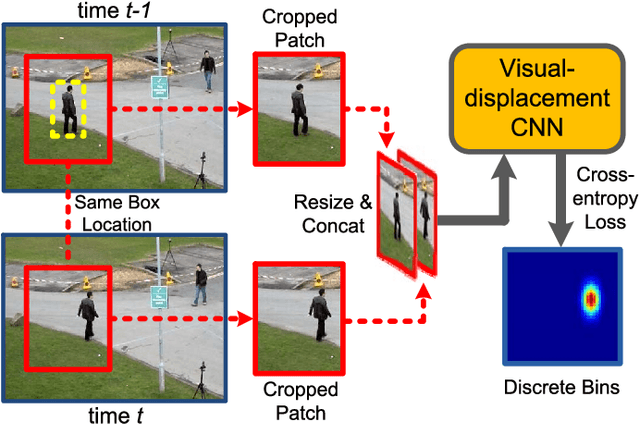
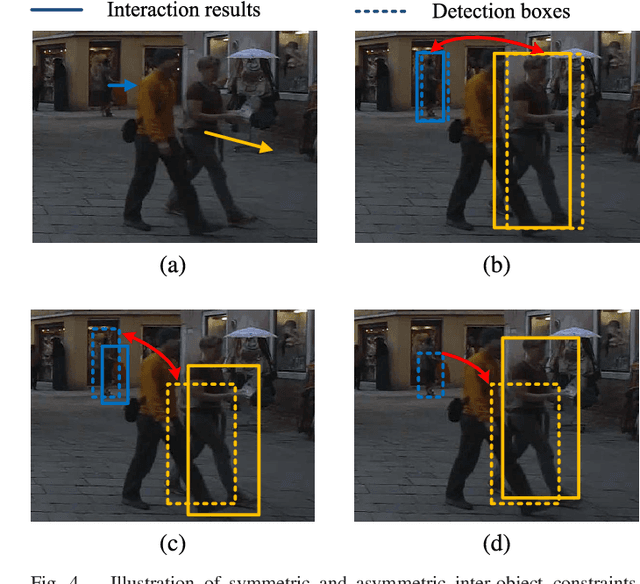
Online Multi-Object Tracking (MOT) is a challenging problem and has many important applications including intelligence surveillance, robot navigation and autonomous driving. In existing MOT methods, individual object's movements and inter-object relations are mostly modeled separately and relations between them are still manually tuned. In addition, inter-object relations are mostly modeled in a symmetric way, which we argue is not an optimal setting. To tackle those difficulties, in this paper, we propose a Deep Continuous Conditional Random Field (DCCRF) for solving the online MOT problem in a track-by-detection framework. The DCCRF consists of unary and pairwise terms. The unary terms estimate tracked objects' displacements across time based on visual appearance information. They are modeled as deep Convolution Neural Networks, which are able to learn discriminative visual features for tracklet association. The asymmetric pairwise terms model inter-object relations in an asymmetric way, which encourages high-confidence tracklets to help correct errors of low-confidence tracklets and not to be affected by low-confidence ones much. The DCCRF is trained in an end-to-end manner for better adapting the influences of visual information as well as inter-object relations. Extensive experimental comparisons with state-of-the-arts as well as detailed component analysis of our proposed DCCRF on two public benchmarks demonstrate the effectiveness of our proposed MOT framework.