 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure Aware SLAM using Quadrics and Planes
Paper and Code
Nov 02, 2018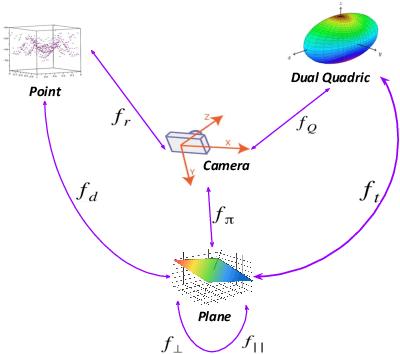
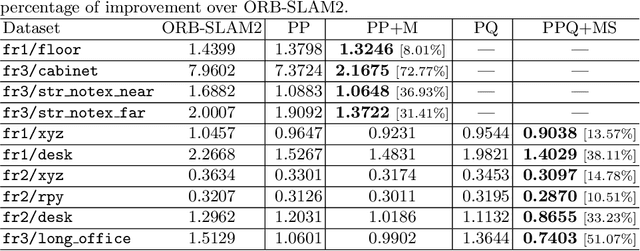
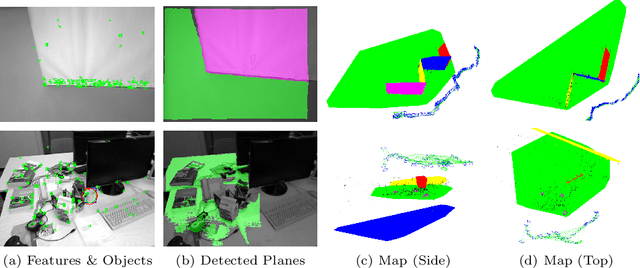
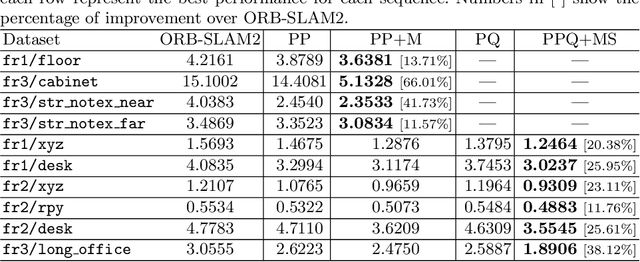
Simultaneous Localization And Mapping (SLAM) is a fundamental problem in mobile robotics. While point-based SLAM methods provide accurate camera localization, the generated maps lack semantic information. On the other hand, state of the art object detection methods provide rich information about entities present in the scene from a single image. This work marries the two and proposes a method for representing generic objects as quadrics which allows object detections to be seamlessly integrated in a SLAM framework. For scene coverage, additional dominant planar structures are modeled as infinite planes. Experiments show that the proposed points-planes-quadrics representation can easily incorporate Manhattan and object affordance constraints, greatly improving camera localization and leading to semantically meaningful maps. The performance of our SLAM system is demonstrated in https://youtu.be/dR-rB9keF8M .