 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning at the Ends: From Hand to Tool Affordances in Humanoid Robots
Paper and Code
Apr 09, 2018
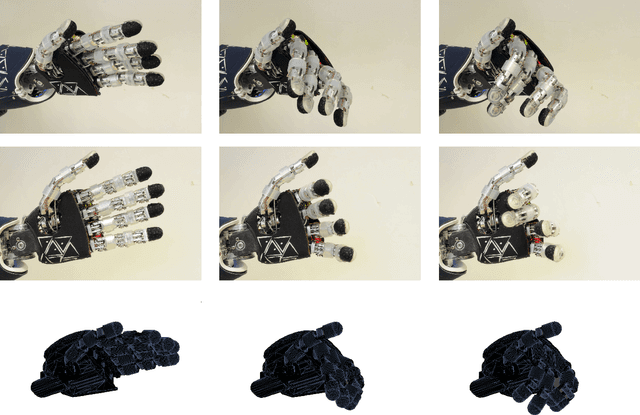
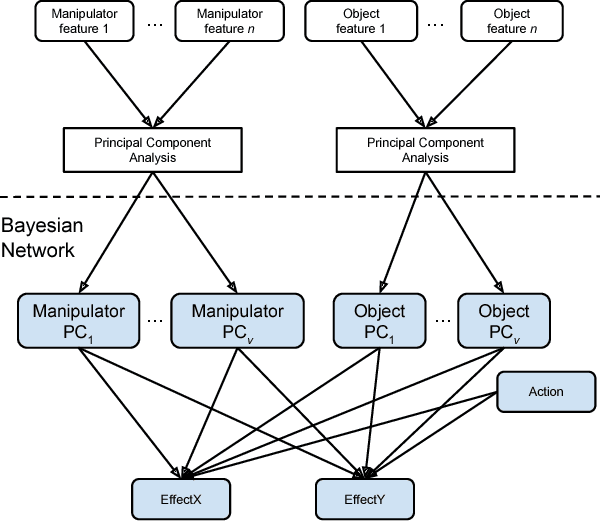
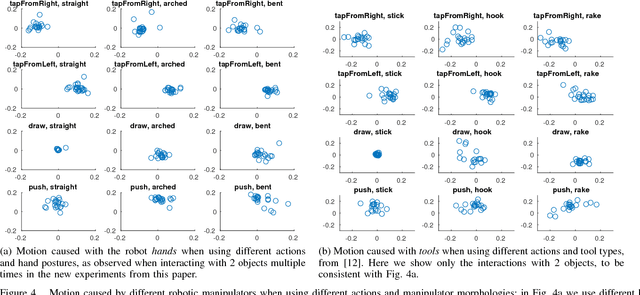
One of the open challenges in designing robots that operate successfully in the unpredictable human environment is how to make them able to predict what actions they can perform on objects, and what their effects will be, i.e., the ability to perceive object affordances. Since modeling all the possible world interactions is unfeasible, learning from experience is required, posing the challenge of collecting a large amount of experiences (i.e., training data). Typically, a manipulative robot operates on external objects by using its own hands (or similar end-effectors), but in some cases the use of tools may be desirable, nevertheless, it is reasonable to assume that while a robot can collect many sensorimotor experiences using its own hands, this cannot happen for all possible human-made tools. Therefore, in this paper we investigate the developmental transition from hand to tool affordances: what sensorimotor skills that a robot has acquired with its bare hands can be employed for tool use? By employing a visual and motor imagination mechanism to represent different hand postures compactly, we propose a probabilistic model to learn hand affordances, and we show how this model can generalize to estimate the affordances of previously unseen tools, ultimately supporting planning, decision-making and tool selection tasks in humanoid robots. We present experimental results with the iCub humanoid robot, and we publicly release the collected sensorimotor data in the form of a hand posture affordances dataset.