 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DOF Pedestrian Trajectory Prediction Learned from Long-Term Autonomous Mobile Robot Deployment Data
Paper and Code
Sep 30, 2017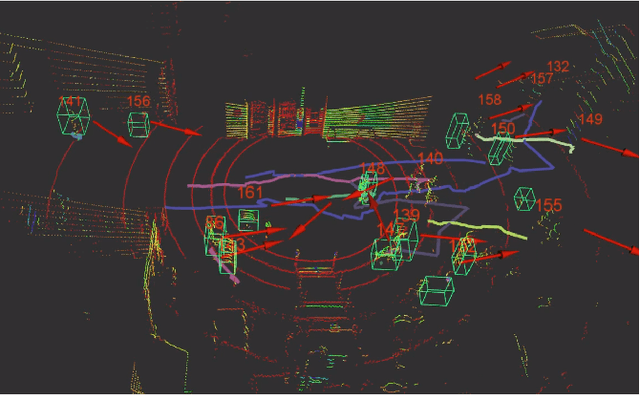
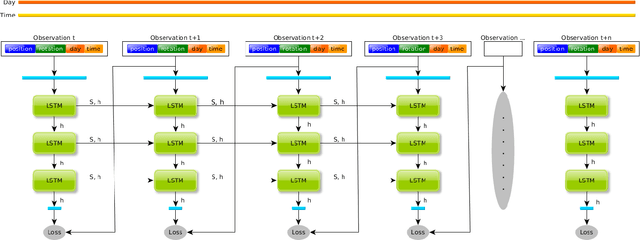
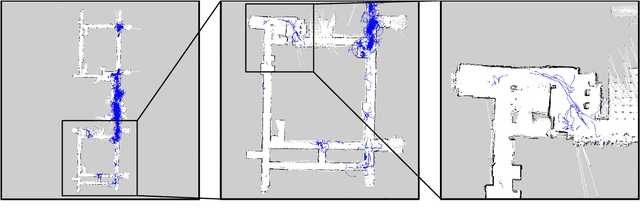
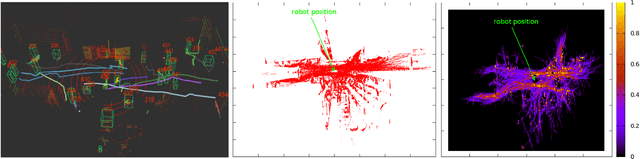
This paper presents a novel 3DOF pedestrian trajectory prediction approach for autonomous mobile service robots. While most previously reported methods are based on learning of 2D positions in monocular camera images, our approach uses range-finder sensors to learn and predict 3DOF pose trajectories (i.e. 2D position plus 1D rotation within the world coordinate system). Our approach, T-Pose-LSTM (Temporal 3DOF-Pose Long-Short-Term Memory), is trained using long-term data from real-world robot deployments and aims to learn context-dependent (environment- and time-specific) human activities. Our approach incorporates long-term temporal information (i.e. date and time) with short-term pose observations as input. A sequence-to-sequence LSTM encoder-decoder is trained, which encodes observations into LSTM and then decodes as predictions. For deployment, it can perform on-the-fly prediction in real-time. Instead of using manually annotated data, we rely on a robust human detection, tracking and SLAM system, providing us with examples in a global coordinate system. We validate the approach using more than 15K pedestrian trajectories recorded in a care home environment over a period of three months. The experiment shows that the proposed T-Pose-LSTM model advances the state-of-the-art 2D-based method for human trajectory prediction in long-term mobile robot deployments.