 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Self-Supervised Learning and Imitation for Vision-Based Rope Manipulation
Paper and Code
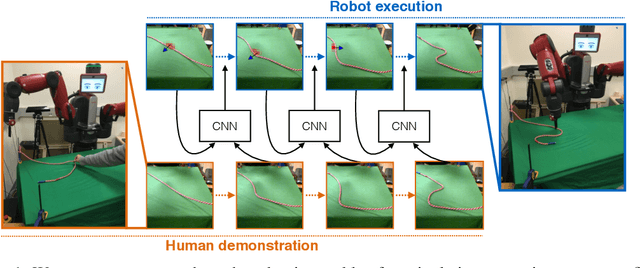
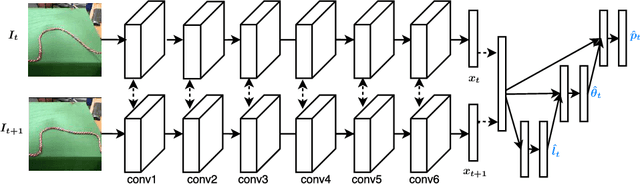
Manipulation of deformable objects, such as ropes and cloth, is an important but challenging problem in robotics. We present a learning-based system where a robot takes as input a sequence of images of a human manipulating a rope from an initial to goal configuration, and outputs a sequence of actions that can reproduce the human demonstration, using only monocular images as input. To perform this task, the robot learns a pixel-level inverse dynamics model of rope manipulation directly from images in a self-supervised manner, using about 60K interactions with the rope collected autonomously by the robot. The human demonstration provides a high-level plan of what to do and the low-level inverse model is used to execute the plan. We show that by combining the high and low-level plans, the robot can successfully manipulate a rope into a variety of target shapes using only a sequence of human-provided images for direction.