 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShaft-integrated Force Sensing with Transformer-based Dynamics Compensation for Telesurgery
May 29, 2026Robot-Assisted Minimally Invasive Surgery (RAMIS) enhances surgeon dexterity, with newer platforms leveraging haptic feedback to further improve performance. Such force information has broader potential to inform performance assessment, tactile localization, and surgical autonomy. This motivates the need for accessible approaches to integrating force sensing into RAMIS tools. This work presents a method for integrating a six-axis commercial force sensor into the distal end of a standard cable-driven surgical instrument, enabling end-effector force measurement while preserving the original mechanical functionality of the device. The proposed design emphasizes reproducibility and accessibility for research applications, requiring no specialized manufacturing tools. A transformer neural network integrates force sensor measurements with robot state information to aid estimation of applied forces at the end-effector, compensating for internal cable forces arising from actuation. Our proposed approach achieved normalized errors below 6%, and generalized to unseen conditions better than purely proximal data-driven sensing approaches. High internal cable forces caused sensor saturation and reduced axial force observability, which can degrade performance along the tool's major axis and under higher load conditions. Given current levels of performance, the balance of system integrability and performance enables applications and research into timely topics of haptic feedback, skill assessment, and force-informed autonomy in RAMIS. Videos and code are available at https://enhanced-telerobotics.github.io/shaft force sensing.
Data-centric Design of Learning-based Surgical Gaze Perception Models in Multi-Task Simulation
Feb 09, 2026In robot-assisted minimally invasive surgery (RMIS), reduced haptic feedback and depth cues increase reliance on expert visual perception, motivating gaze-guided training and learning-based surgical perception models. However, operative expert gaze is costly to collect, and it remains unclear how the source of gaze supervision, both expertise level (intermediate vs. novice) and perceptual modality (active execution vs. passive viewing), shapes what attention models learn. We introduce a paired active-passive, multi-task surgical gaze dataset collected on the da Vinci SimNow simulator across four drills. Active gaze was recorded during task execution using a VR headset with eye tracking, and the corresponding videos were reused as stimuli to collect passive gaze from observers, enabling controlled same-video comparisons. We quantify skill- and modality-dependent differences in gaze organization and evaluate the substitutability of passive gaze for operative supervision using fixation density overlap analyses and single-frame saliency modeling. Across settings, MSI-Net produced stable, interpretable predictions, whereas SalGAN was unstable and often poorly aligned with human fixations. Models trained on passive gaze recovered a substantial portion of intermediate active attention, but with predictable degradation, and transfer was asymmetric between active and passive targets. Notably, novice passive labels approximated intermediate-passive targets with limited loss on higher-quality demonstrations, suggesting a practical path for scalable, crowd-sourced gaze supervision in surgical coaching and perception modeling.
Real-time Capable Learning-based Visual Tool Pose Correction via Differentiable Simulation
May 13, 2025



Autonomy in Minimally Invasive Robotic Surgery (MIRS) has the potential to reduce surgeon cognitive and task load, thereby increasing procedural efficiency. However, implementing accurate autonomous control can be difficult due to poor end-effector proprioception, a limitation of their cable-driven mechanisms. Although the robot may have joint encoders for the end-effector pose calculation, various non-idealities make the entire kinematics chain inaccurate. Modern vision-based pose estimation methods lack real-time capability or can be hard to train and generalize. In this work, we demonstrate a real-time capable, vision transformer-based pose estimation approach that is trained using end-to-end differentiable kinematics and rendering in simulation. We demonstrate the potential of this method to correct for noisy pose estimates in simulation, with the longer term goal of verifying the sim-to-real transferability of our approach.
Three Degree-of-Freedom Soft Continuum Kinesthetic Haptic Display for Telemanipulation Via Sensory Substitution at the Finger
Sep 17, 2024



Sensory substitution is an effective approach for displaying stable haptic feedback to a teleoperator under time delay. The finger is highly articulated, and can sense movement and force in many directions, making it a promising location for sensory substitution based on kinesthetic feedback. However, existing finger kinesthetic devices either provide only one-degree-of-freedom feedback, are bulky, or have low force output. Soft pneumatic actuators have high power density, making them suitable for realizing high force kinesthetic feedback in a compact form factor. We present a soft pneumatic handheld kinesthetic feedback device for the index finger that is controlled using a constant curvature kinematic model. \changed{It has respective position and force ranges of +-3.18mm and +-1.00N laterally, and +-4.89mm and +-6.01N vertically, indicating its high power density and compactness. The average open-loop radial position and force accuracy of the kinematic model are 0.72mm and 0.34N.} Its 3Hz bandwidth makes it suitable for moderate speed haptic interactions in soft environments. We demonstrate the three-dimensional kinesthetic force feedback capability of our device for sensory substitution at the index figure in a virtual telemanipulation scenario.
Vision-Based Force Estimation for Minimally Invasive Telesurgery Through Contact Detection and Local Stiffness Models
Mar 27, 2024



In minimally invasive telesurgery, obtaining accurate force information is difficult due to the complexities of in-vivo end effector force sensing. This constrains development and implementation of haptic feedback and force-based automated performance metrics, respectively. Vision-based force sensing approaches using deep learning are a promising alternative to intrinsic end effector force sensing. However, they have limited ability to generalize to novel scenarios, and require learning on high-quality force sensor training data that can be difficult to obtain. To address these challenges, this paper presents a novel vision-based contact-conditional approach for force estimation in telesurgical environments. Our method leverages supervised learning with human labels and end effector position data to train deep neural networks. Predictions from these trained models are optionally combined with robot joint torque information to estimate forces indirectly from visual data. We benchmark our method against ground truth force sensor data and demonstrate generality by fine-tuning to novel surgical scenarios in a data-efficient manner. Our methods demonstrated greater than 90% accuracy on contact detection and less than 10% force prediction error. These results suggest potential usefulness of contact-conditional force estimation for sensory substitution haptic feedback and tissue handling skill evaluation in clinical settings.
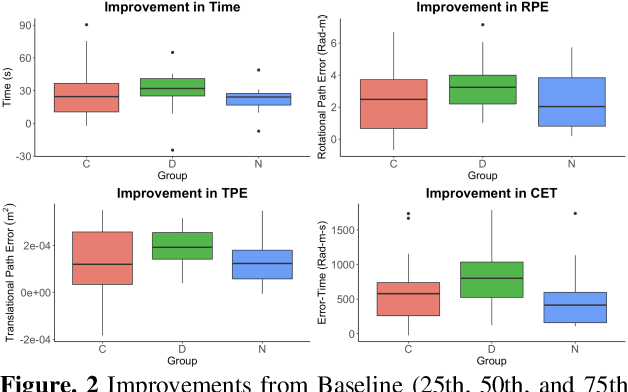
Haptic Guidance and Haptic Error Amplification in a Virtual Surgical Robotic Training Environment
Sep 11, 2023



Teleoperated robotic systems have introduced more intuitive control for minimally invasive surgery, but the optimal method for training remains unknown. Recent motor learning studies have demonstrated that exaggeration of errors helps trainees learn to perform tasks with greater speed and accuracy. We hypothesized that training in a force field that pushes the operator away from a desired path would improve their performance on a virtual reality ring-on-wire task. Forty surgical novices trained under a no-force, guidance, or error-amplifying force field over five days. Completion time, translational and rotational path error, and combined error-time were evaluated under no force field on the final day. The groups significantly differed in combined error-time, with the guidance group performing the worst. Error-amplifying field participants showed the most improvement and did not plateau in their performance during training, suggesting that learning was still ongoing. Guidance field participants had the worst performance on the final day, confirming the guidance hypothesis. Participants with high initial path error benefited more from guidance. Participants with high initial combined error-time benefited more from guidance and error-amplifying force field training. Our results suggest that error-amplifying and error-reducing haptic training for robot-assisted telesurgery benefits trainees of different abilities differently.
A Modular 3-Degree-of-Freedom Force Sensor for Robot-assisted Minimally Invasive Surgery Research
Nov 10, 2022



Effective force modulation during tissue manipulation is important for ensuring safe robot-assisted minimally invasive surgery (RMIS). Strict requirements for in-vivo distal force sensing have led to prior sensor designs that trade off ease of manufacture and integration against force measurement accuracy along the tool axis. These limitations have made collecting high-quality 3-degree-of-freedom (3-DoF) bimanual force data in RMIS inaccessible to researchers. We present a modular and manufacturable 3-DoF force sensor that integrates easily with an existing RMIS tool. We achieve this by relaxing biocompatibility and sterilizability requirements while utilizing commercial load cells and common electromechanical fabrication techniques. The sensor has a range of +-5 N axially and +-3 N laterally with average root mean square errors(RMSEs) of below 0.15 N in all directions. During teleoperated mock tissue manipulation tasks, a pair of jaw-mounted sensors achieved average RMSEs of below 0.15 N in all directions. For grip force, it achieved an RMSE of 0.156 N. The sensor has sufficient accuracy within the range of forces found in delicate manipulation tasks, with potential use in bimanual haptic feedback and robotic force control. As an open-source design, the sensors can be adapted to suit additional robotic applications outside of RMIS.
A 4-DoF Parallel Origami Haptic Device for Normal, Shear, and Torsion Feedback
Sep 24, 2021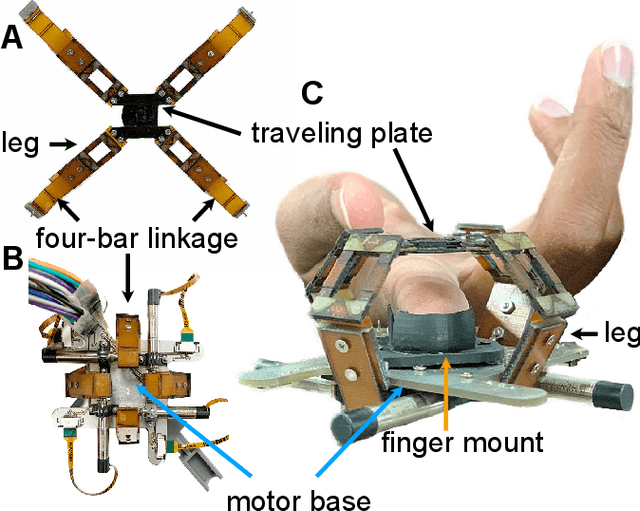



We present a mesoscale finger-mounted 4-degree-of-freedom (DoF) haptic device that is created using origami fabrication techniques. The 4-DoF device is a parallel kinematic mechanism capable of delivering normal, shear, and torsional haptic feedback to the fingertip. Traditional methods of robot fabrication are not well suited for designing small robotic devices because it is challenging and expensive to manufacture small, low-friction joints. Our device uses origami manufacturing principles to reduce complexity and the device footprint. We characterize the bandwidth, workspace, and force output of the device. The capabilities of the torsion-DoF are demonstrated in a virtual reality scenario. Our results show that the device can deliver haptic feedback in 4-DoFs with an effective operational workspace of 0.64cm$^3$ with $\pm 30 ^ \circ$ rotation at every location. The maximum forces and torques the device can apply in the x-, y-, z-, and $\theta$-directions, are $\pm$1.5N, $\pm$1.5N, 2N, and 5N$\cdot$mm, respectively, and the device has an operating bandwidth of 9Hz.
Robot-Assisted Surgical Training Over Several Days in a Virtual Surgical Environment with Divergent and Convergent Force Fields
Sep 23, 2021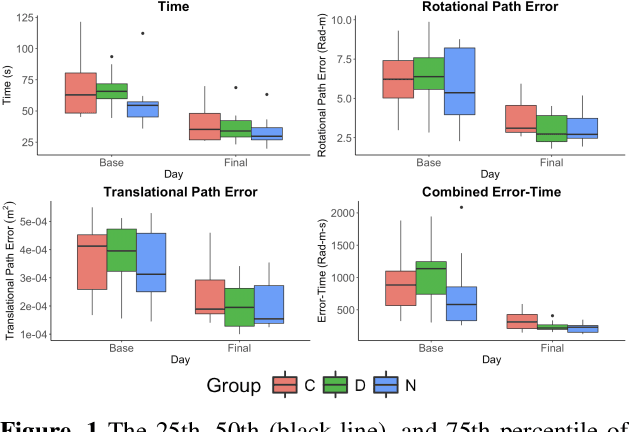
Surgical procedures require a high level of technical skill to ensure efficiency and patient safety. Due to the direct effect of surgeon skill on patient outcomes, the development of cost-effective and realistic training methods is imperative to accelerate skill acquisition. Teleoperated robotic devices allow for intuitive ergonomic control, but the learning curve for these systems remains steep. Recent studies in motor learning have shown that visual or physical exaggeration of errors helps trainees to learn to perform tasks faster and more accurately. In this study, we extended the work from two previous studies to investigate the performance of subjects in different force field training conditions, including convergent (assistive), divergent (resistive), and no force field (null).
* 2 pages, 2 figures, Hamlyn Symposium on Medical Robotics 2019
Characterization of Real-time Haptic Feedback from Multimodal Neural Network-based Force Estimates during Teleoperation
Sep 23, 2021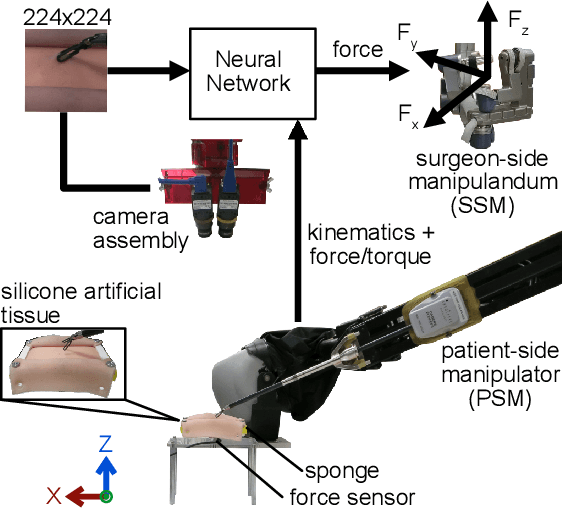
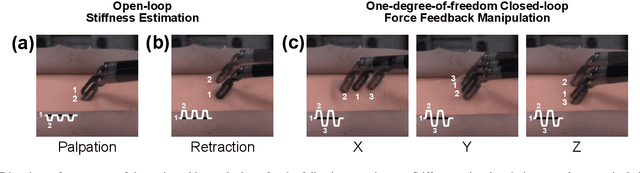
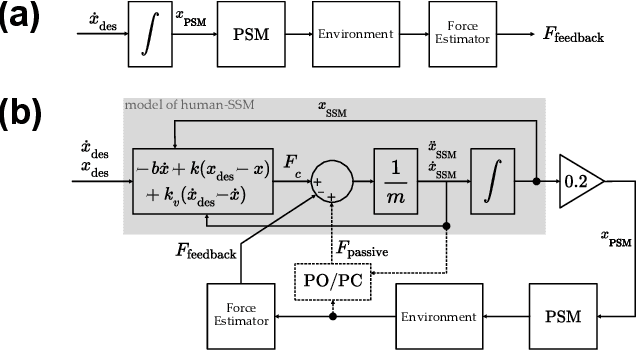
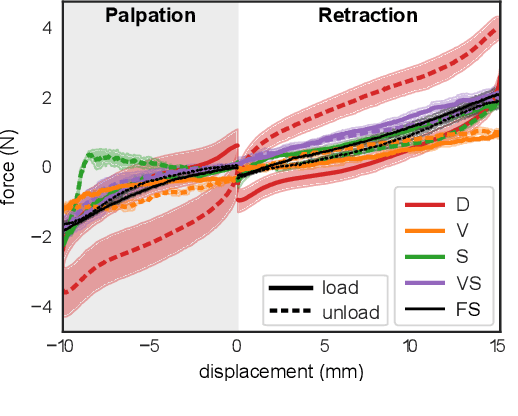
Force estimation using neural networks is a promising approach to enable haptic feedback in minimally invasive surgical robots without end-effector force sensors. Various network architectures have been proposed, but none have been tested in real-time with surgical-like manipulations. Thus, questions remain about the real-time transparency and stability of force feedback from neural network-based force estimates. We characterize the real-time impedance transparency and stability of force feedback rendered on a da Vinci Research Kit teleoperated surgical robot using neural networks with vision-only, state-only, or state and vision inputs. Networks were trained on an existing dataset of teleoperated manipulations without force feedback. We measured real-time transparency without rendered force feedback by commanding the patient-side robot to perform vertical retractions and palpations on artificial silicone tissue. To measure stability and transparency during teleoperation with force feedback to the operator, we modeled a one-degree-of-freedom human and surgeon-side manipulandum that moved the patient-side robot to perform manipulations. We found that the multimodal vision and state network displayed more transparent impedance than single-modality networks under no force feedback. State-based networks displayed instabilities during manipulation with force feedback. This instability was reduced in the multimodal network when refit with additional data collected during teleoperation with force feedback.