 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLook-to-Touch: A Vision-Enhanced Proximity and Tactile Sensor for Distance and Geometry Perception in Robotic Manipulation
Apr 14, 2025Camera-based tactile sensors provide robots with a high-performance tactile sensing approach for environment perception and dexterous manipulation. However, achieving comprehensive environmental perception still requires cooperation with additional sensors, which makes the system bulky and limits its adaptability to unstructured environments. In this work, we present a vision-enhanced camera-based dual-modality sensor, which realizes full-scale distance sensing from 50 cm to -3 mm while simultaneously keeping ultra-high-resolution texture sensing and reconstruction capabilities. Unlike conventional designs with fixed opaque gel layers, our sensor features a partially transparent sliding window, enabling mechanical switching between tactile and visual modes. For each sensing mode, a dynamic distance sensing model and a contact geometry reconstruction model are proposed. Through integration with soft robotic fingers, we systematically evaluate the performance of each mode, as well as in their synergistic operation. Experimental results show robust distance tracking across various speeds, nanometer-scale roughness detection, and sub-millimeter 3D texture reconstruction. The combination of both modalities improves the robot's efficiency in executing grasping tasks. Furthermore, the embedded mechanical transmission in the sensor allows for fine-grained intra-hand adjustments and precise manipulation, unlocking new capabilities for soft robotic hands.
Hardware-Driven Nonlinear Activation for Stochastic Computing Based Deep Convolutional Neural Networks
Mar 12, 2017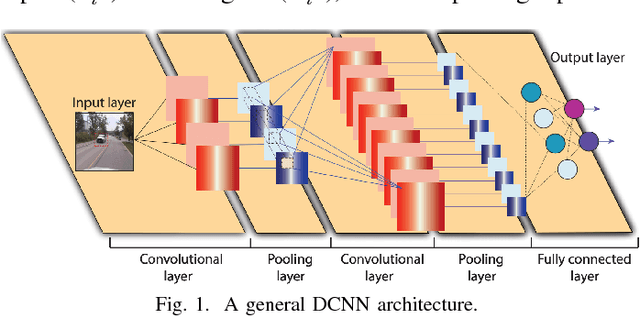
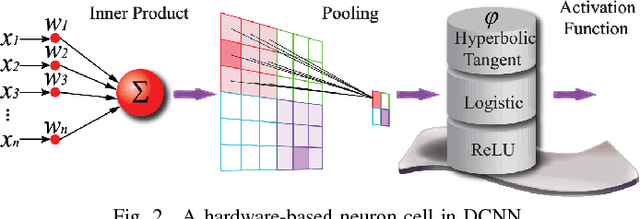
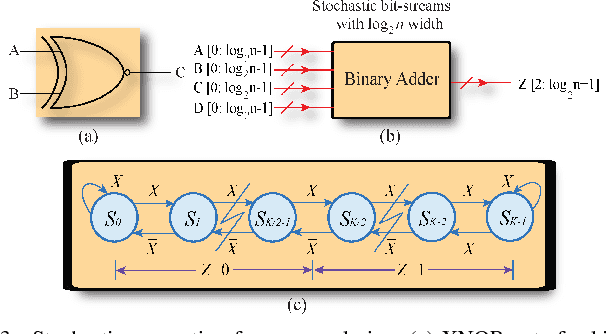
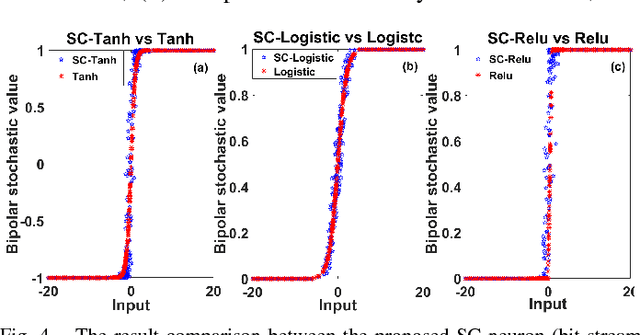
Recently, Deep Convolutional Neural Networks (DCNNs) have made unprecedented progress, achieving the accuracy close to, or even better than human-level perception in various tasks. There is a timely need to map the latest software DCNNs to application-specific hardware, in order to achieve orders of magnitude improvement in performance, energy efficiency and compactness. Stochastic Computing (SC), as a low-cost alternative to the conventional binary computing paradigm, has the potential to enable massively parallel and highly scalable hardware implementation of DCNNs. One major challenge in SC based DCNNs is designing accurate nonlinear activation functions, which have a significant impact on the network-level accuracy but cannot be implemented accurately by existing SC computing blocks. In this paper, we design and optimize SC based neurons, and we propose highly accurate activation designs for the three most frequently used activation functions in software DCNNs, i.e, hyperbolic tangent, logistic, and rectified linear units. Experimental results on LeNet-5 using MNIST dataset demonstrate that compared with a binary ASIC hardware DCNN, the DCNN with the proposed SC neurons can achieve up to 61X, 151X, and 2X improvement in terms of area, power, and energy, respectively, at the cost of small precision degradation.In addition, the SC approach achieves up to 21X and 41X of the area, 41X and 72X of the power, and 198200X and 96443X of the energy, compared with CPU and GPU approaches, respectively, while the error is increased by less than 3.07%. ReLU activation is suggested for future SC based DCNNs considering its superior performance under a small bit stream length.