 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoMoT: A Unified Vision-Language-Action Model with Asynchronous Mixture-of-Transformers for End-to-End Autonomous Driving
Mar 16, 2026Integrating vision-language models (VLMs) into end-to-end (E2E) autonomous driving (AD) systems has shown promise in improving scene understanding. However, existing integration strategies suffer from several limitations: they either struggle to resolve distribution misalignment between reasoning and action spaces, underexploit the general reasoning capabilities of pretrained VLMs, or incur substantial inference latency during action policy generation, which degrades driving performance. To address these challenges, we propose \OURS in this work, an end-to-end AD framework that unifies reasoning and action generation within a single vision-language-action (VLA) model. Our approach leverages a mixture-of-transformer (MoT) architecture with joint attention sharing, which preserves the general reasoning capabilities of pre-trained VLMs while enabling efficient fast-slow inference through asynchronous execution at different task frequencies. Extensive experiments on multiple benchmarks, under both open- and closed-loop settings, demonstrate that \OURS achieves competitive performance compared to state-of-the-art methods. We further investigate the functional boundary of pre-trained VLMs in AD, examining when AD-tailored fine-tuning is necessary. Our results show that pre-trained VLMs can achieve competitive multi-task scene understanding performance through semantic prompting alone, while fine-tuning remains essential for action-level tasks such as decision-making and trajectory planning. We refer to \href{https://automot-website.github.io/}{Project Page} for the demonstration videos and qualitative results.
A clustering adaptive Gaussian process regression method: response patterns based real-time prediction for nonlinear solid mechanics problems
Sep 15, 2024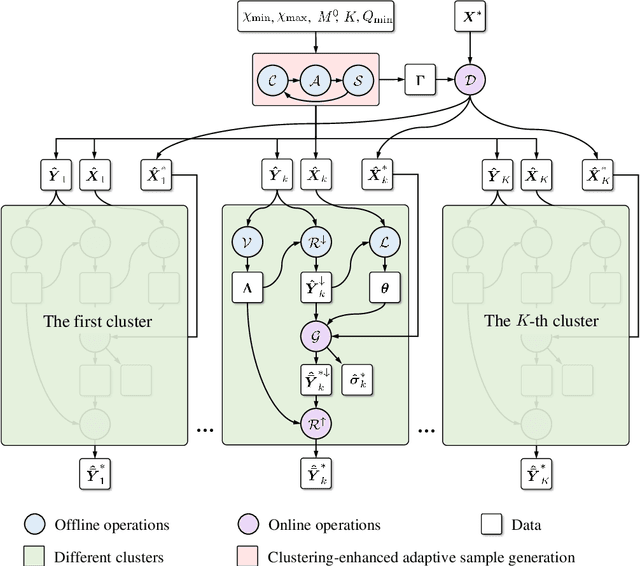
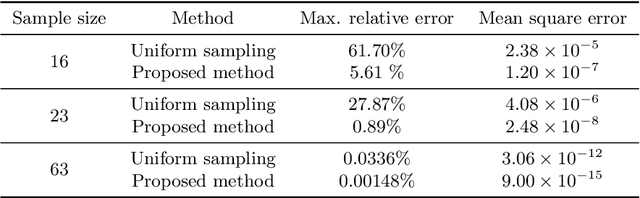
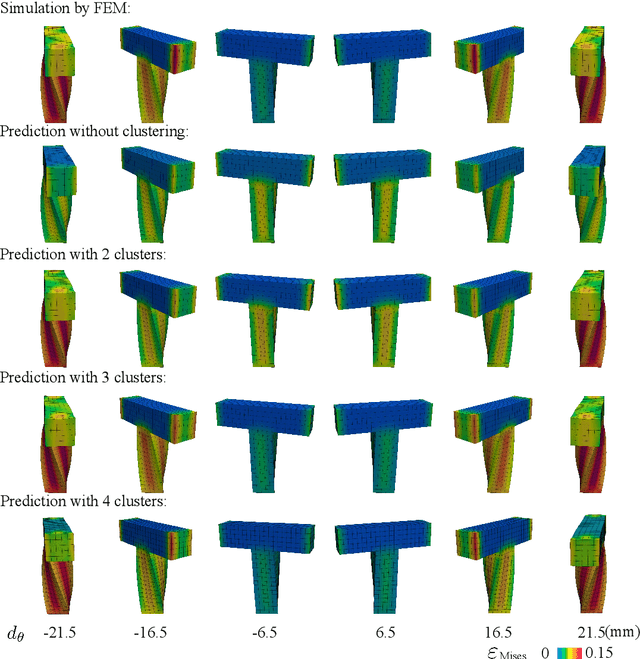
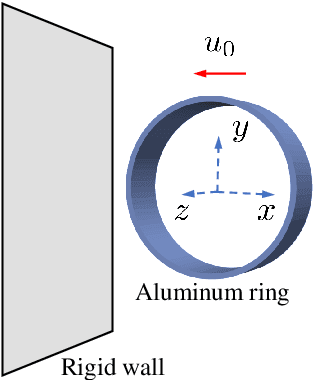
Numerical simulation is powerful to study nonlinear solid mechanics problems. However, mesh-based or particle-based numerical methods suffer from the common shortcoming of being time-consuming, particularly for complex problems with real-time analysis requirements. This study presents a clustering adaptive Gaussian process regression (CAG) method aiming for real-time prediction for nonlinear structural responses in solid mechanics. It is a data-driven machine learning method featuring a small sample size, high accuracy, and high efficiency, leveraging nonlinear structural response patterns. Similar to the traditional Gaussian process regression (GPR) method, it operates in offline and online stages. In the offline stage, an adaptive sample generation technique is introduced to cluster datasets into distinct patterns for demand-driven sample allocation. This ensures comprehensive coverage of the critical samples for the solution space of interest. In the online stage, following the divide-and-conquer strategy, a pre-prediction classification categorizes problems into predefined patterns sequentially predicted by the trained multi-pattern Gaussian process regressor. In addition, dimension reduction and restoration techniques are employed in the proposed method to enhance its efficiency. A set of problems involving material, geometric, and boundary condition nonlinearities is presented to demonstrate the CAG method's abilities. The proposed method can offer predictions within a second and attain high precision with only about 20 samples within the context of this study, outperforming the traditional GPR using uniformly distributed samples for error reductions ranging from 1 to 3 orders of magnitude. The CAG method is expected to offer a powerful tool for real-time prediction of nonlinear solid mechanical problems and shed light on the complex nonlinear structural response pattern.