 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoMoT: A Unified Vision-Language-Action Model with Asynchronous Mixture-of-Transformers for End-to-End Autonomous Driving
Mar 16, 2026Integrating vision-language models (VLMs) into end-to-end (E2E) autonomous driving (AD) systems has shown promise in improving scene understanding. However, existing integration strategies suffer from several limitations: they either struggle to resolve distribution misalignment between reasoning and action spaces, underexploit the general reasoning capabilities of pretrained VLMs, or incur substantial inference latency during action policy generation, which degrades driving performance. To address these challenges, we propose \OURS in this work, an end-to-end AD framework that unifies reasoning and action generation within a single vision-language-action (VLA) model. Our approach leverages a mixture-of-transformer (MoT) architecture with joint attention sharing, which preserves the general reasoning capabilities of pre-trained VLMs while enabling efficient fast-slow inference through asynchronous execution at different task frequencies. Extensive experiments on multiple benchmarks, under both open- and closed-loop settings, demonstrate that \OURS achieves competitive performance compared to state-of-the-art methods. We further investigate the functional boundary of pre-trained VLMs in AD, examining when AD-tailored fine-tuning is necessary. Our results show that pre-trained VLMs can achieve competitive multi-task scene understanding performance through semantic prompting alone, while fine-tuning remains essential for action-level tasks such as decision-making and trajectory planning. We refer to \href{https://automot-website.github.io/}{Project Page} for the demonstration videos and qualitative results.
Path-specific Underwater Acoustic Channel Tracking and its Application in Passive Time Reversal Mirror
Mar 01, 2021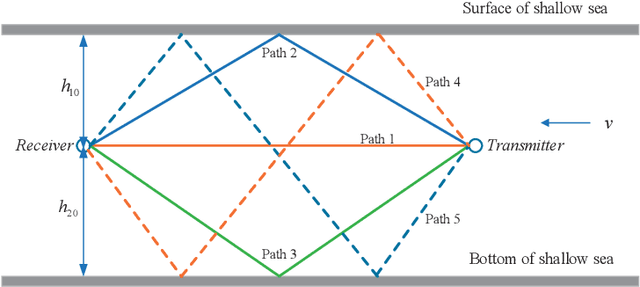
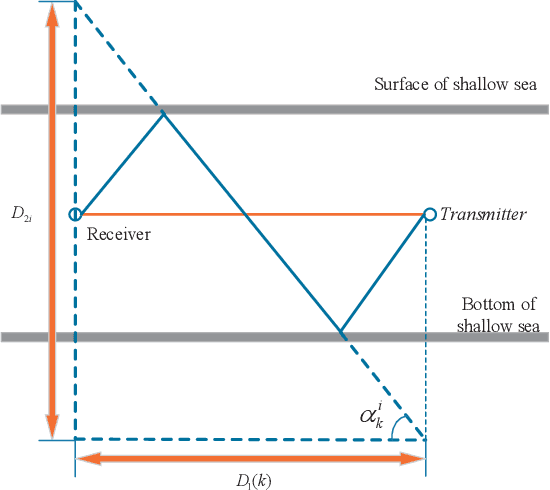
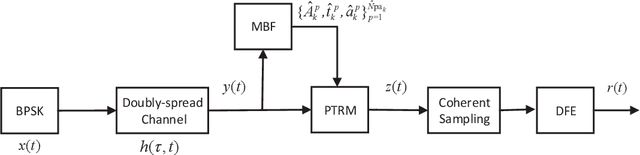

We consider the underwater acoustic channel which is time-variant and doubly-spread in this work. Since conventional channel estimation and decision feedback equalizer (DFE) can not work well for this type of channel, a path-specific underwater acoustic channel tracking is proposed. It is based on the framework of Kalman filter. We provide a simplified sound propagation model as the state transition model. A multipath tracker is proposed which is tolerant of the model-mismatch. Then we can obtain the time-variant path number and path-specific parameters such as delay and Doppler scaling factor. We also consider the application of the proposed path-specific underwater acoustic channel tracking. We propose two types of passive time reversal mirror (PTRM) with our path-specific parameters for time-variant and doubly-spread underwater acoustic channel. With the path-specific parameters obtained by the proposed channel tracking, the proposed PTRM can not only match the time dispersion as conventional PTRM, but also the doubly-spread channel, since the path-specific delay and Doppler scaler factor can help to match the channel in both time and frequency domain. For extensive doubly-spread channel, we can further apply the path-specific compensation to the PTRM. Both simulations and experimental results by data from 2016 Qiandao Lake experiment show the efficiency of proposed path-specific channel tracking and proposed PTRMs with path-specific parameters.
Dynamic Underwater Acoustic Channel Tracking for Correlated Rapidly Time-varying Channels
Mar 01, 2021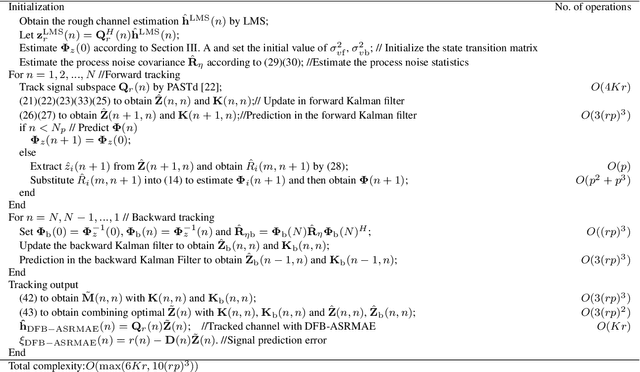
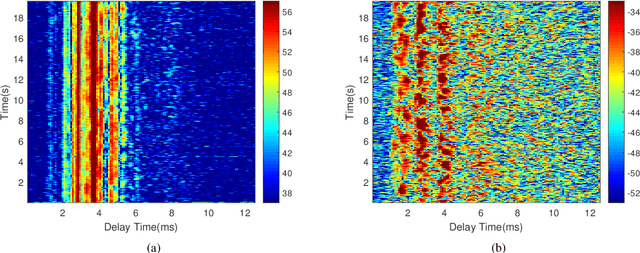
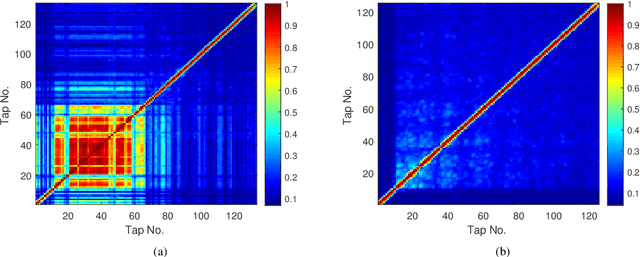
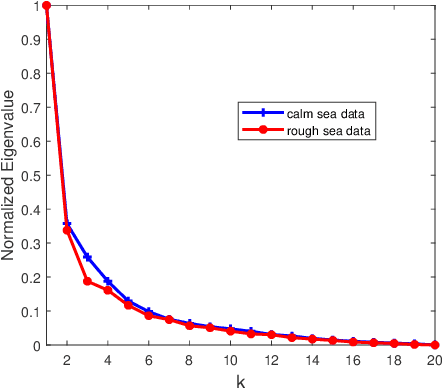
In this work, we focus on the model-mismatch problem for model-based subspace channel tracking in the correlated underwater acoustic channel. A model based on the underwater acoustic channel's correlation can be used as the state-space model in the Kalman filter to improve the underwater acoustic channel tracking compared that without a model. Even though the data support the assumption that the model is slow-varying and uncorrelated to some degree, to improve the tracking performance further, we can not ignore the model-mismatch problem because most channel models encounter this problem in the underwater acoustic channel. Therefore, in this work, we provide a dynamic time-variant state-space model for underwater acoustic channel tracking. This model is tolerant to the slight correlation after decorrelation. Moreover, a forward-backward Kalman filter is combined to further improve the tracking performance. The performance of our proposed algorithm is demonstrated with the same at-sea data as that used for conventional channel tracking. Compared with the conventional algorithms, the proposed algorithm shows significant improvement, especially in rough sea conditions in which the channels are fast-varying.