 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoverage Path Planning for Autonomous Sailboats in Inhomogeneous and Time-Varying Oceans: A Spatiotemporal Optimization Approach
Feb 13, 2026Autonomous sailboats are well suited for long-duration ocean observation due to their wind-driven endurance. However, their performance is highly anisotropic and strongly influenced by inhomogeneous and time-varying wind and current fields, limiting the effectiveness of existing coverage methods such as boustrophedon sweeping. Planning under these environmental and maneuvering constraints remains underexplored. This paper presents a spatiotemporal coverage path planning framework tailored to autonomous sailboats, combining (1) topology-based morphological constraints in the spatial domain to promote compact and continuous coverage, and (2) forecast-aware look-ahead planning in the temporal domain to anticipate environmental evolution and enable foresighted decision-making. Simulations conducted under stochastic inhomogeneous and time-varying ocean environments, including scenarios with partial directional accessibility, demonstrate that the proposed method generates efficient and feasible coverage paths where traditional strategies often fail. To the best of our knowledge, this study provides the first dedicated solution to the coverage path planning problem for autonomous sailboats operating in inhomogeneous and time-varying ocean environments, establishing a foundation for future cooperative multi-sailboat coverage.
A survey of modularized backstepping control design approaches to nonlinear ODE systems
May 03, 2023Backstepping is a mature and powerful Lyapunov-based design approach for a specific set of systems. Throughout the development over three decades, innovative theories and practices have extended backstepping to stabilization and tracking problems for nonlinear systems with growing complexity. The attractions of the backstepping-like approach are the recursive design processes and modularized design. A nonlinear system can be transferred into a group of simple problems and solved it by a sequential superposition of the corresponding approaches for each problem. To handle the complexities, backstepping designs always come up with adaptive control and robust control. The survey aims to review the milestone theoretical achievements among thousands of publications making the state-feedback backstepping designs of complex ODE systems to be systematic and modularized. Several selected elegant methods are reviewed, starting from the general designs, and then the finite-time control enhancing the convergence rate, the fuzzy logic system and neural network estimating the system unknowns, the Nussbaum function handling unknown control coefficients, barrier Lyapunov function solving state constraints, and the hyperbolic tangent function applying in robust designs. The associated assumptions and Lyapunov function candidates, inequalities, and the deduction key points are reviewed. The nonlinearity and complexities lay in state constraints, disturbance, input nonlinearities, time-delay effects, pure feedback systems, event-triggered systems, and stochastic systems. Instead of networked systems, the survey focuses on stand-alone systems.
A guidance and maneuvering control system design with anti-collision using stream functions with vortex flows for autonomous marine vessels
Jun 04, 2021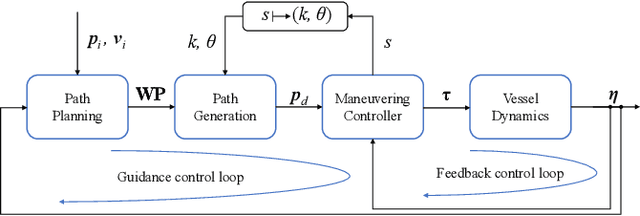
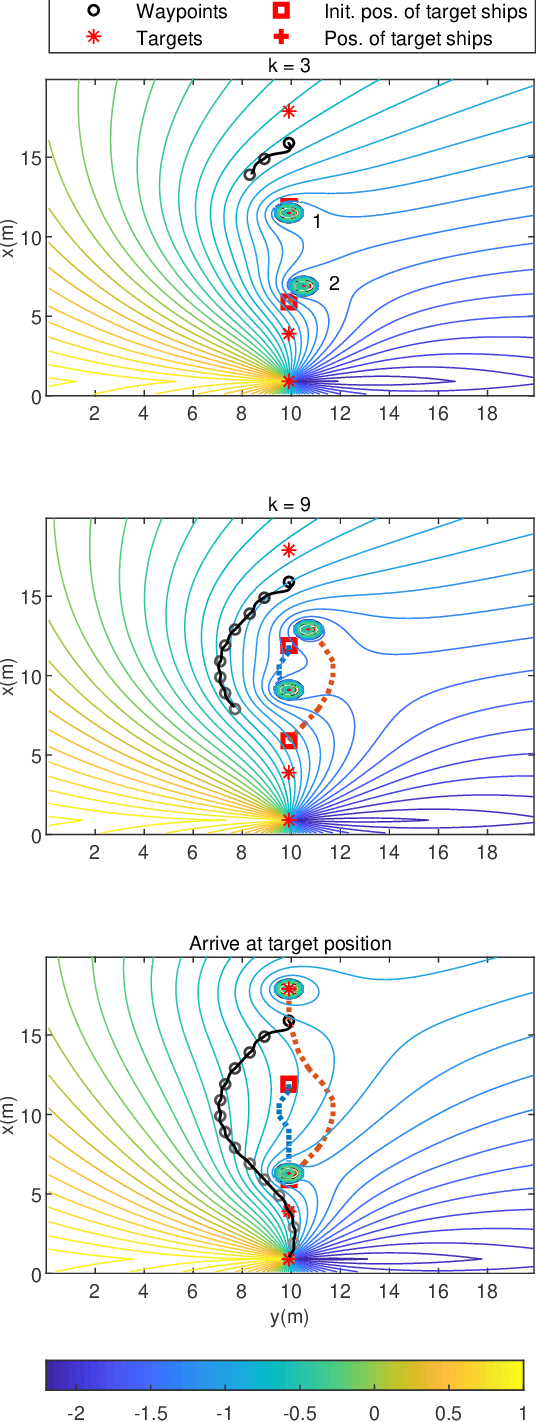
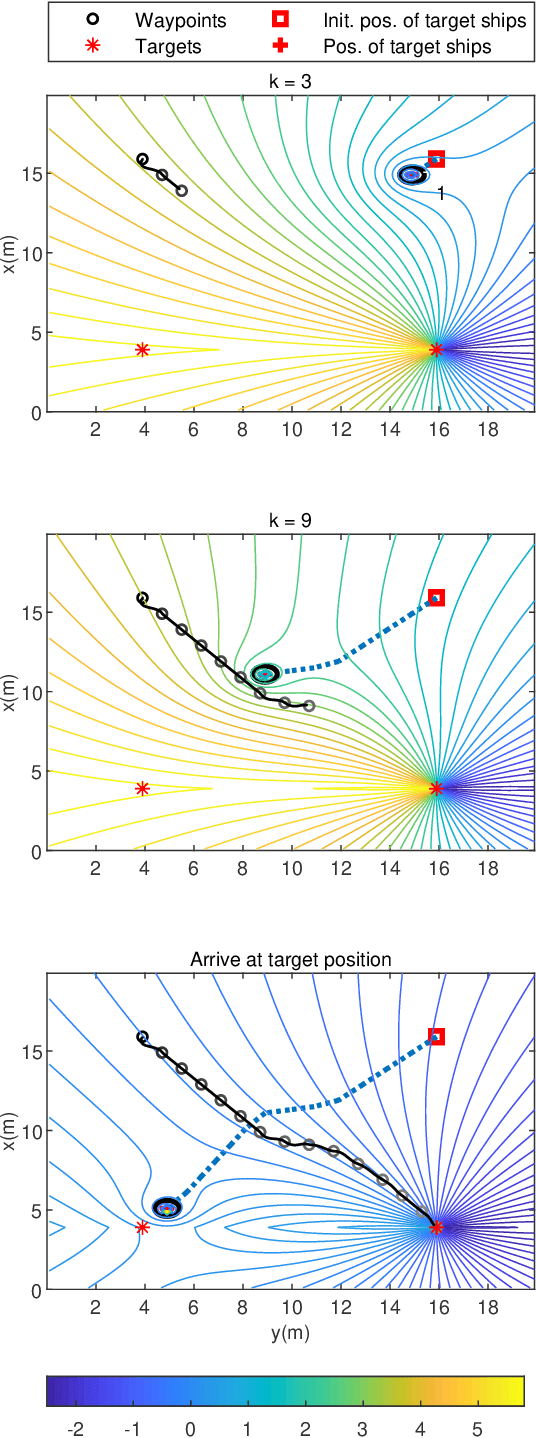
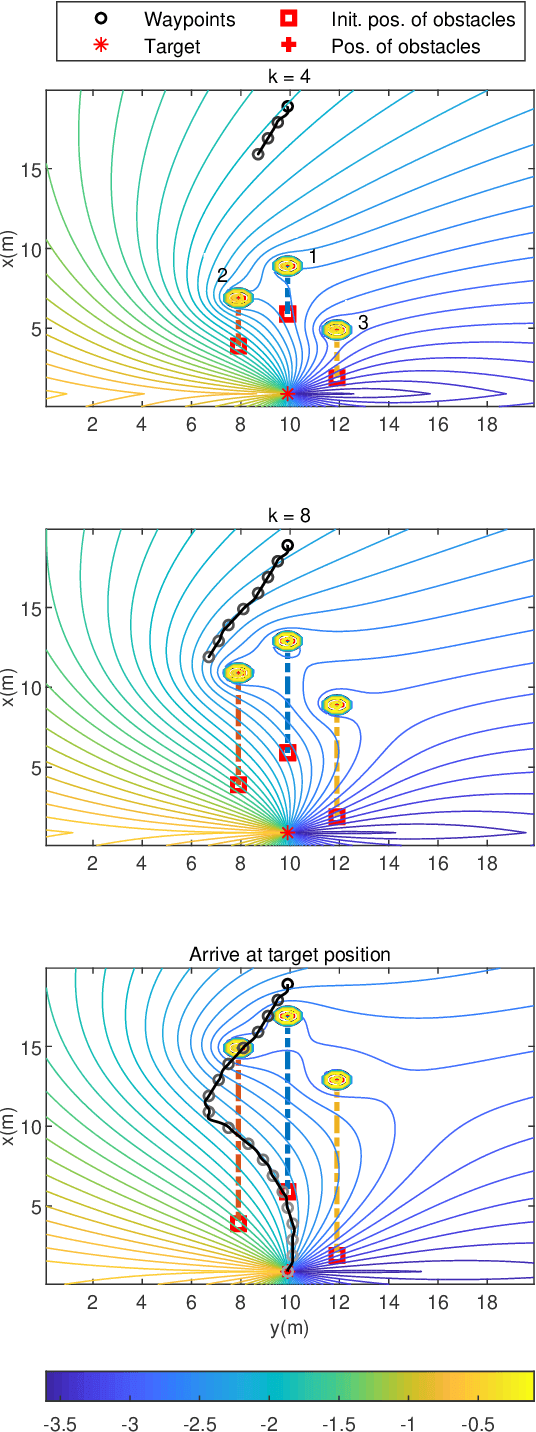
Autonomous marine vessels are expected to avoid inter-vessel collisions and comply with the international regulations for safe voyages. This paper presents a stepwise path planning method using stream functions. The dynamic flow of fluids is used as a guidance model, where the collision avoidance in static environments is achieved by applying the circular theorem in the sink flow. We extend this method to dynamic environments by adding vortex flows in the flow field. The stream function is recursively updated to enable on the fly waypoint decisions. The vessel avoids collisions and also complies with several rules of the Convention on the International Regulations for Preventing Collisions at Sea. The method is conceptually and computationally simple and convenient to tune, and yet versatile to handle complex and dense marine traffic with multiple dynamic obstacles. The ship dynamics are taken into account, by using Bezier curves to generate a sufficiently smooth path with feasible curvature. Numerical simulations are conducted to verify the proposed method.