 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Obstacle Avoidance Algorithm for Real-Time Applications
Feb 09, 2026Robust navigation in changing marine environments requires autonomous systems capable of perceiving, reasoning, and acting under uncertainty. This study introduces a hybrid risk-aware navigation architecture that integrates probabilistic modeling of obstacles along the vehicle path with smooth trajectory optimization for autonomous surface vessels. The system constructs probabilistic risk maps that capture both obstacle proximity and the behavior of dynamic objects. A risk-biased Rapidly Exploring Random Tree (RRT) planner leverages these maps to generate collision-free paths, which are subsequently refined using B-spline algorithms to ensure trajectory continuity. Three distinct RRT* rewiring modes are implemented based on the cost function: minimizing the path length, minimizing risk, and optimizing a combination of the path length and total risk. The framework is evaluated in experimental scenarios containing both static and dynamic obstacles. The results demonstrate the system's ability to navigate safely, maintain smooth trajectories, and dynamically adapt to changing environmental risks. Compared with conventional LIDAR or vision-only navigation approaches, the proposed method shows improvements in operational safety and autonomy, establishing it as a promising solution for risk-aware autonomous vehicle missions in uncertain and dynamic environments.
Digital-physical testbed for ship autonomy studies in the Marine Cybernetics Laboratory basin
May 10, 2025The algorithms developed for Maritime Autonomous Surface Ships (MASS) are often challenging to test on actual vessels due to high operational costs and safety considerations. Simulations offer a cost-effective alternative and eliminate risks, but they may not accurately represent real-world dynamics for the given tasks. Utilizing small-scale model ships and robotic vessels in conjunction with a laboratory basin provides an accessible testing environment for the early stages of validation processes. However, designing and developing a model vessel for a single test can be costly and cumbersome, and often researchers lack availability to such infrastructure. To address these challenges and enable streamlined testing, we have developed an in-house testbed that facilitates the development, testing, verification, and validation of MASS algorithms in a digital-physical laboratory. This infrastructure includes a set of small-scale model vessels, a simulation environment for each vessel, a comprehensive testbed environment, and a digital twin in Unity. With this, we aim to establish a full design and verification pipeline that starts with high-fidelity simulation models of each model vessel, to the model-scale testing in the laboratory basin, allowing possibilities for moving to semi-fullscale validation with the R/V milliAmpere 1 passenger ferry and full-scale validation using the R/V Gunnerus. In this work, we present our progress on the development of this testbed environment and its components, demonstrating its effectiveness in enabling ship guidance, navigation, and control (GNC) including autonomy.
A guidance and maneuvering control system design with anti-collision using stream functions with vortex flows for autonomous marine vessels
Jun 04, 2021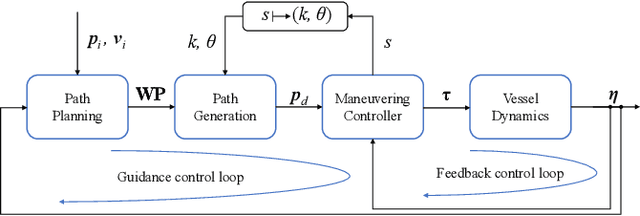
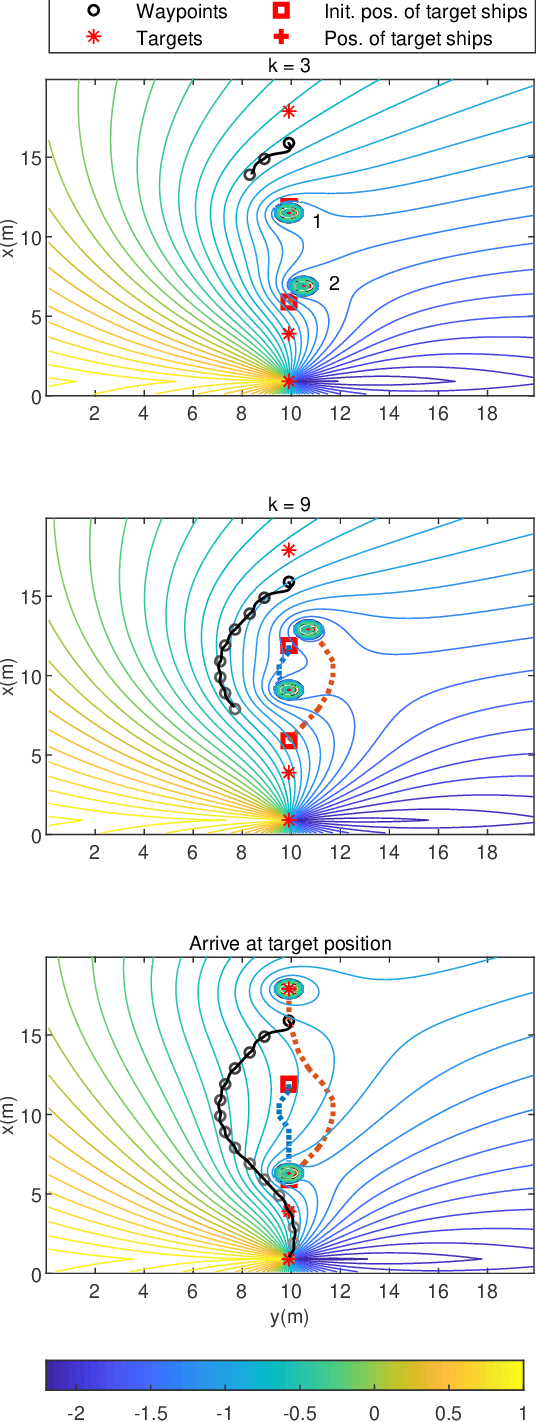
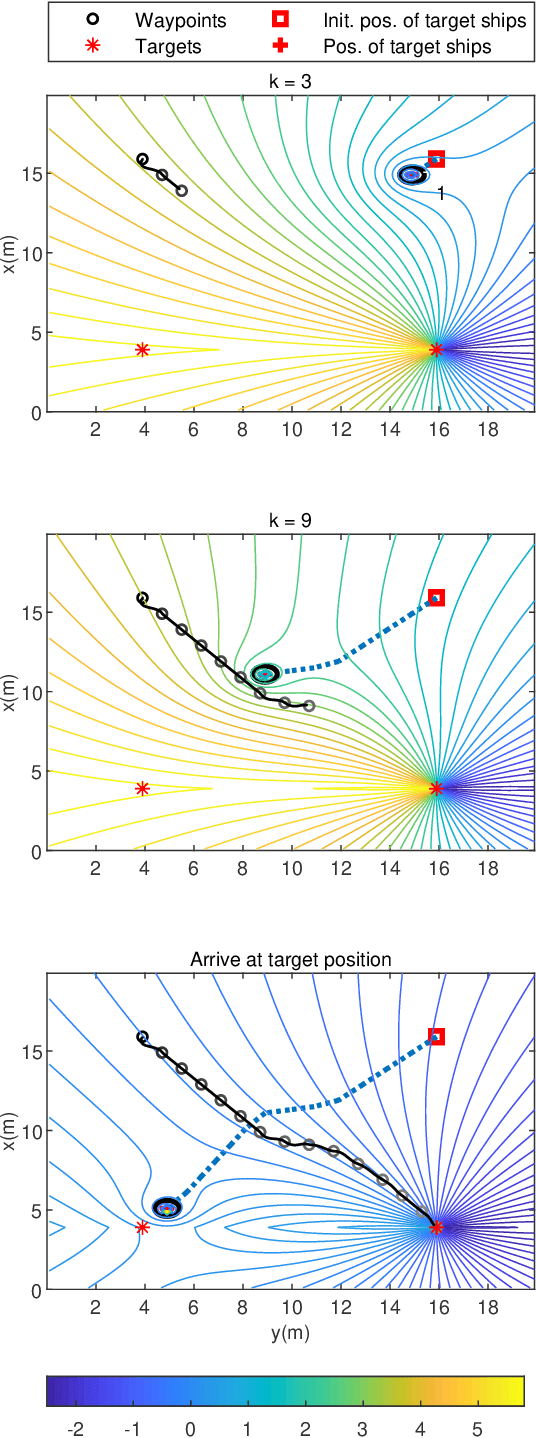
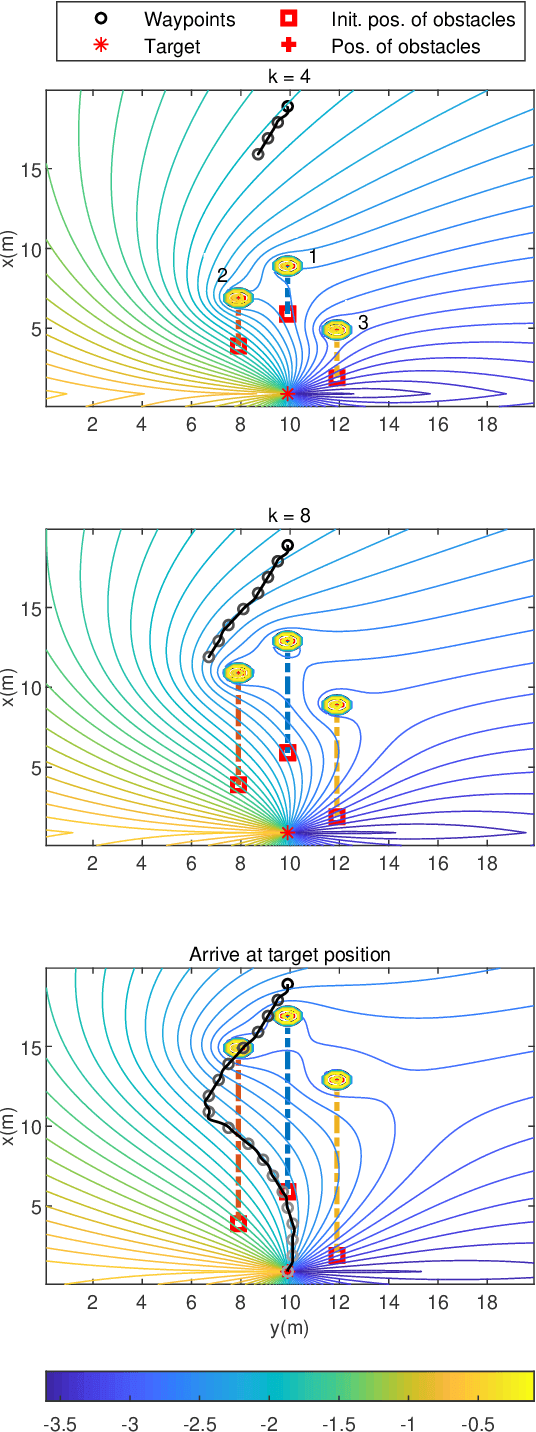
Autonomous marine vessels are expected to avoid inter-vessel collisions and comply with the international regulations for safe voyages. This paper presents a stepwise path planning method using stream functions. The dynamic flow of fluids is used as a guidance model, where the collision avoidance in static environments is achieved by applying the circular theorem in the sink flow. We extend this method to dynamic environments by adding vortex flows in the flow field. The stream function is recursively updated to enable on the fly waypoint decisions. The vessel avoids collisions and also complies with several rules of the Convention on the International Regulations for Preventing Collisions at Sea. The method is conceptually and computationally simple and convenient to tune, and yet versatile to handle complex and dense marine traffic with multiple dynamic obstacles. The ship dynamics are taken into account, by using Bezier curves to generate a sufficiently smooth path with feasible curvature. Numerical simulations are conducted to verify the proposed method.