 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning Based Power Allocation for Minimizing AoI and Energy Consumption in MIMO-NOMA IoT Systems
Mar 11, 2023Multi-input multi-out and non-orthogonal multiple access (MIMO-NOMA) internet-of-things (IoT) systems can improve channel capacity and spectrum efficiency distinctly to support the real-time applications. Age of information (AoI) is an important metric for real-time application, but there is no literature have minimized AoI of the MIMO-NOMA IoT system, which motivates us to conduct this work. In MIMO-NOMA IoT system, the base station (BS) determines the sample collection requirements and allocates the transmission power for each IoT device. Each device determines whether to sample data according to the sample collection requirements and adopts the allocated power to transmit the sampled data to the BS over MIMO-NOMA channel. Afterwards, the BS employs successive interference cancelation (SIC) technique to decode the signal of the data transmitted by each device. The sample collection requirements and power allocation would affect AoI and energy consumption of the system. It is critical to determine the optimal policy including sample collection requirements and power allocation to minimize the AoI and energy consumption of MIMO-NOMA IoT system, where the transmission rate is not a constant in the SIC process and the noise is stochastic in the MIMO-NOMA channel. In this paper, we propose the optimal power allocation to minimize the AoI and energy consumption of MIMO- NOMA IoT system based on deep reinforcement learning (DRL). Extensive simulations are carried out to demonstrate the superiority of the optimal power allocation.
Asynchronous Federated Learning for Edge-assisted Vehicular Networks
Aug 03, 2022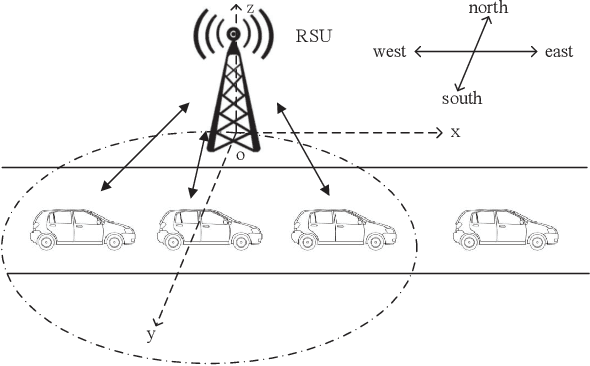
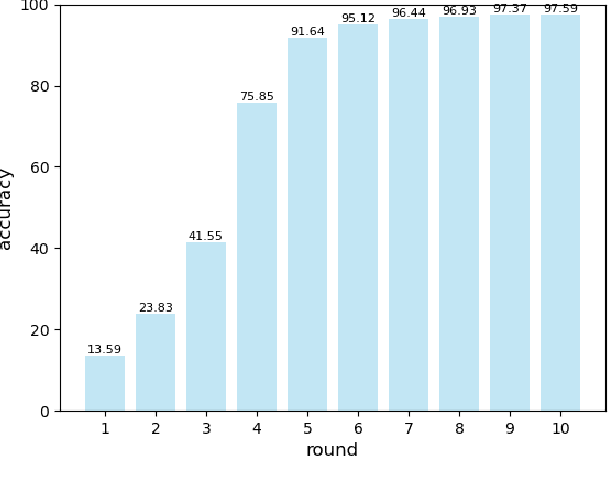
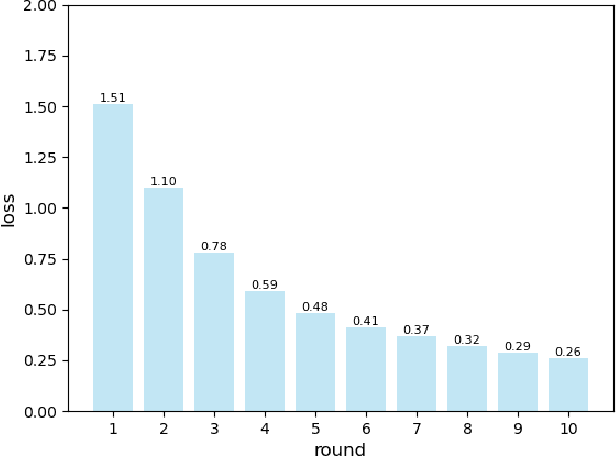
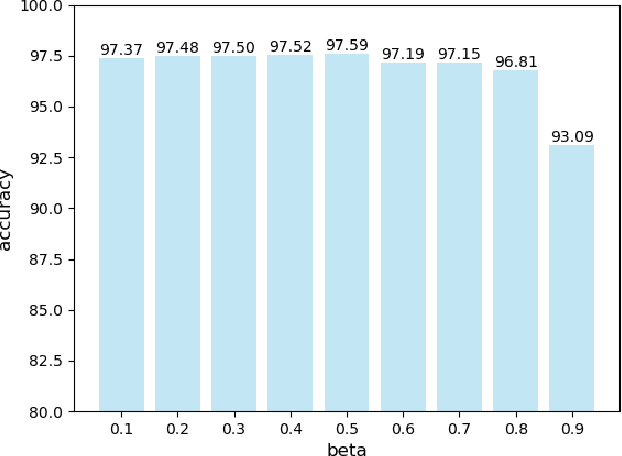
Vehicular networks enable vehicles support real-time vehicular applications through training data. Due to the limited computing capability, vehicles usually transmit data to a road side unit (RSU) at the network edge to process data. However, vehicles are usually reluctant to share data with each other due to the privacy issue. For the traditional federated learning (FL), vehicles train the data locally to obtain a local model and then upload the local model to the RSU to update the global model, thus the data privacy can be protected through sharing model parameters instead of data. The traditional FL updates the global model synchronously, i.e., the RSU needs to wait for all vehicles to upload their models for the global model updating. However, vehicles may usually drive out of the coverage of the RSU before they obtain their local models through training, which reduces the accuracy of the global model. It is necessary to propose an asynchronous federated learning (AFL) to solve this problem, where the RSU updates the global model once it receives a local model from a vehicle. However, the amount of data, computing capability and vehicle mobility may affect the accuracy of the global model. In this paper, we jointly consider the amount of data, computing capability and vehicle mobility to design an AFL scheme to improve the accuracy of the global model. Extensive simulation experiments have demonstrated that our scheme outperforms the FL scheme