 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Single-Sample: Reliable Multi-Sample Distillation for Video Understanding
Mar 12, 2026Traditional black-box distillation for Large Vision-Language Models (LVLMs) typically relies on a single teacher response per input, which often yields high-variance responses and format inconsistencies in multimodal or temporal scenarios. To mitigate this unreliable supervision, we propose R-MSD (Reliable Multi-Sample Distillation), a framework that explicitly models teacher sampling variance to enhance distillation stability. Rather than relying on a single teacher response, our approach leverages a task-adaptive teacher pool to provide robust supervision tailored to both closed-ended and open-ended reasoning. By integrating quality-aware signal matching with an adversarial distillation objective, our approach effectively filters teacher noise while maximizing knowledge transfer. Extensive evaluations across comprehensive video understanding benchmarks demonstrate that R-MSD consistently outperforms single sample distillation methods. We additionally include an original SFT+RL 4B baseline under the same training budget, which shows only marginal gains, while our method achieves significant improvements. With a 4B student model, our approach delivers gains on VideoMME (+1.5%), Video-MMMU (+3.2%), and MathVerse (+3.6%).
TopoDiT-3D: Topology-Aware Diffusion Transformer with Bottleneck Structure for 3D Point Cloud Generation
May 14, 2025



Recent advancements in Diffusion Transformer (DiT) models have significantly improved 3D point cloud generation. However, existing methods primarily focus on local feature extraction while overlooking global topological information, such as voids, which are crucial for maintaining shape consistency and capturing complex geometries. To address this limitation, we propose TopoDiT-3D, a Topology-Aware Diffusion Transformer with a bottleneck structure for 3D point cloud generation. Specifically, we design the bottleneck structure utilizing Perceiver Resampler, which not only offers a mode to integrate topological information extracted through persistent homology into feature learning, but also adaptively filters out redundant local features to improve training efficiency. Experimental results demonstrate that TopoDiT-3D outperforms state-of-the-art models in visual quality, diversity, and training efficiency. Furthermore, TopoDiT-3D demonstrates the importance of rich topological information for 3D point cloud generation and its synergy with conventional local feature learning. Videos and code are available at https://github.com/Zechao-Guan/TopoDiT-3D.
RoboMM: All-in-One Multimodal Large Model for Robotic Manipulation
Dec 10, 2024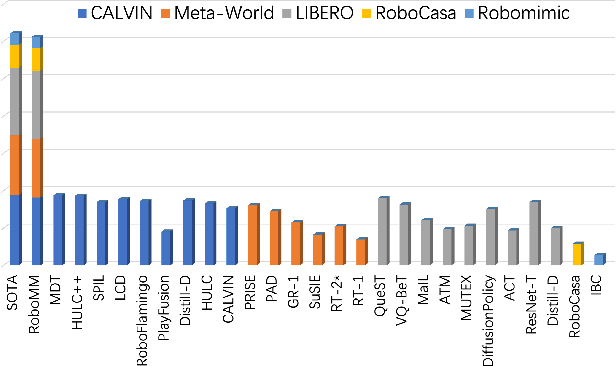
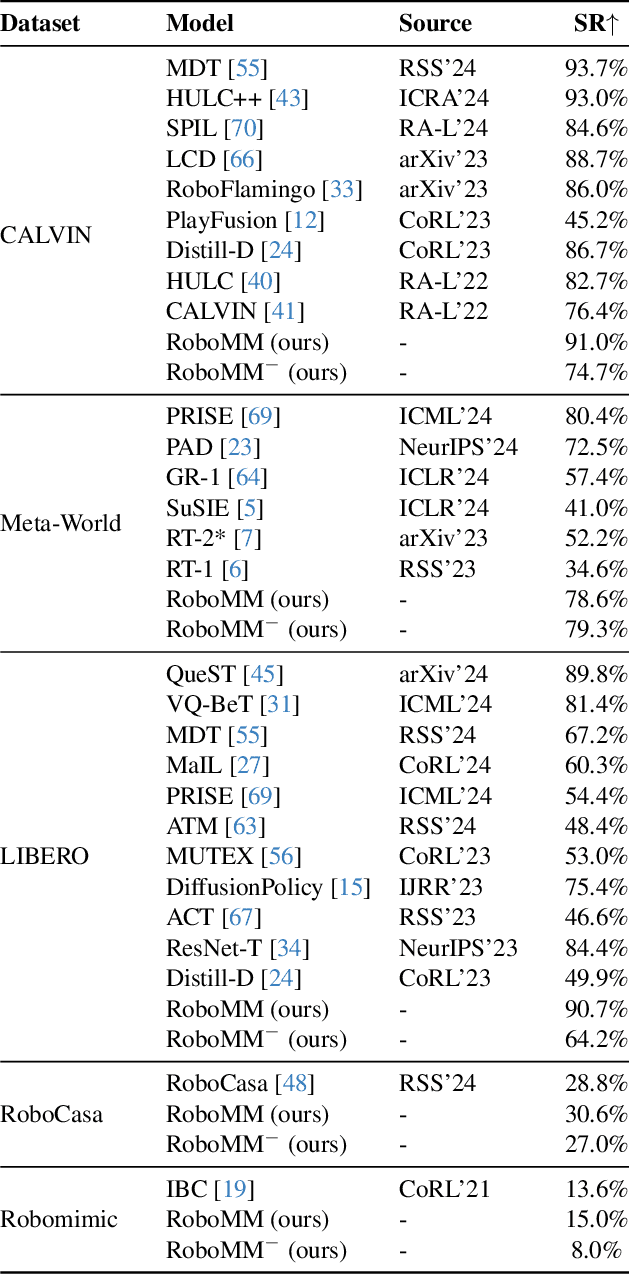

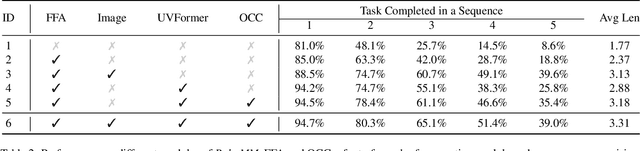
In recent years, robotics has advanced significantly through the integration of larger models and large-scale datasets. However, challenges remain in applying these models to 3D spatial interactions and managing data collection costs. To address these issues, we propose the multimodal robotic manipulation model, RoboMM, along with the comprehensive dataset, RoboData. RoboMM enhances 3D perception through camera parameters and occupancy supervision. Building on OpenFlamingo, it incorporates Modality-Isolation-Mask and multimodal decoder blocks, improving modality fusion and fine-grained perception. RoboData offers the complete evaluation system by integrating several well-known datasets, achieving the first fusion of multi-view images, camera parameters, depth maps, and actions, and the space alignment facilitates comprehensive learning from diverse robotic datasets. Equipped with RoboData and the unified physical space, RoboMM is the generalist policy that enables simultaneous evaluation across all tasks within multiple datasets, rather than focusing on limited selection of data or tasks. Its design significantly enhances robotic manipulation performance, increasing the average sequence length on the CALVIN from 1.7 to 3.3 and ensuring cross-embodiment capabilities, achieving state-of-the-art results across multiple datasets.