 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManiGaussian++: General Robotic Bimanual Manipulation with Hierarchical Gaussian World Model
Jun 24, 2025Multi-task robotic bimanual manipulation is becoming increasingly popular as it enables sophisticated tasks that require diverse dual-arm collaboration patterns. Compared to unimanual manipulation, bimanual tasks pose challenges to understanding the multi-body spatiotemporal dynamics. An existing method ManiGaussian pioneers encoding the spatiotemporal dynamics into the visual representation via Gaussian world model for single-arm settings, which ignores the interaction of multiple embodiments for dual-arm systems with significant performance drop. In this paper, we propose ManiGaussian++, an extension of ManiGaussian framework that improves multi-task bimanual manipulation by digesting multi-body scene dynamics through a hierarchical Gaussian world model. To be specific, we first generate task-oriented Gaussian Splatting from intermediate visual features, which aims to differentiate acting and stabilizing arms for multi-body spatiotemporal dynamics modeling. We then build a hierarchical Gaussian world model with the leader-follower architecture, where the multi-body spatiotemporal dynamics is mined for intermediate visual representation via future scene prediction. The leader predicts Gaussian Splatting deformation caused by motions of the stabilizing arm, through which the follower generates the physical consequences resulted from the movement of the acting arm. As a result, our method significantly outperforms the current state-of-the-art bimanual manipulation techniques by an improvement of 20.2% in 10 simulated tasks, and achieves 60% success rate on average in 9 challenging real-world tasks. Our code is available at https://github.com/April-Yz/ManiGaussian_Bimanual.
A Secure and Efficient Multi-Object Grasping Detection Approach for Robotic Arms
Sep 08, 2022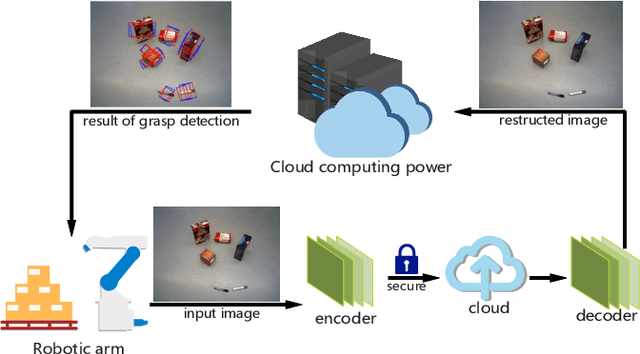
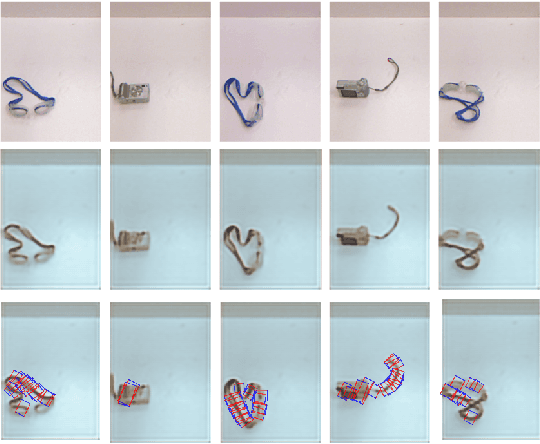
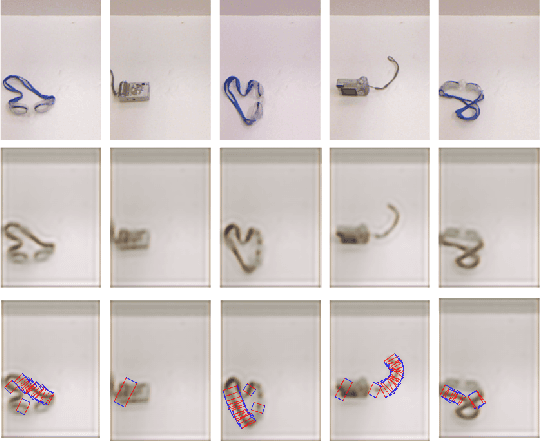
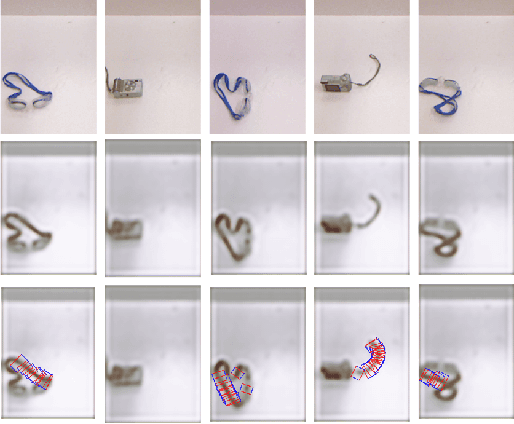
Robotic arms are widely used in automatic industries. However, with wide applications of deep learning in robotic arms, there are new challenges such as the allocation of grasping computing power and the growing demand for security. In this work, we propose a robotic arm grasping approach based on deep learning and edge-cloud collaboration. This approach realizes the arbitrary grasp planning of the robot arm and considers the grasp efficiency and information security. In addition, the encoder and decoder trained by GAN enable the images to be encrypted while compressing, which ensures the security of privacy. The model achieves 92% accuracy on the OCID dataset, the image compression ratio reaches 0.03%, and the structural difference value is higher than 0.91.