 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaleAcross Explorer: Exploring Communication Optimization for Scale-Across AI Model Training
May 23, 2026The rapid scaling of large language model training requires distributing GPU resources across multiple data center buildings and regions. We refer to such paradigm as "scale-across" training. As infrastructure expands, the system design space becomes increasingly intricate, encompassing new model architectures, hardware heterogeneity, and evolving communication patterns. Drawing from Meta's production experience, we highlight the complexities of deploying training jobs across a few data centers housing hundreds of thousands of GPUs. To accelerate exploration of the large design space and to enable efficient training for frontier model development, we conduct in-depth characterization of three key design dimensions: parallelism placement, parallelism scheduling, and network layer technologies. We then propose ScaleAcross Explorer, an optimizer that considers the interplay of design dimensions and holistically optimizes scale-across training. Testbed experiments and simulations demonstrate up to 64.62% training speedups over production configuration and up to 37.59% training speedups over the state-of-the-art baseline across a wide range of design points.
Revisiting Reliability in Large-Scale Machine Learning Research Clusters
Oct 29, 2024



Reliability is a fundamental challenge in operating large-scale machine learning (ML) infrastructures, particularly as the scale of ML models and training clusters continues to grow. Despite decades of research on infrastructure failures, the impact of job failures across different scales remains unclear. This paper presents a view of managing two large, multi-tenant ML clusters, providing quantitative analysis, operational experience, and our own perspective in understanding and addressing reliability concerns at scale. Our analysis reveals that while large jobs are most vulnerable to failures, smaller jobs make up the majority of jobs in the clusters and should be incorporated into optimization objectives. We identify key workload properties, compare them across clusters, and demonstrate essential reliability requirements for pushing the boundaries of ML training at scale. We hereby introduce a taxonomy of failures and key reliability metrics, analyze 11 months of data from two state-of-the-art ML environments with over 150 million A100 GPU hours and 4 million jobs. Building on our data, we fit a failure model to project Mean Time to Failure for various GPU scales. We further propose a method to estimate a related metric, Effective Training Time Ratio, as a function of job parameters, and we use this model to gauge the efficacy of potential software mitigations at scale. Our work provides valuable insights and future research directions for improving the reliability of AI supercomputer clusters, emphasizing the need for flexible, workload-agnostic, and reliability-aware infrastructure, system software, and algorithms.
The Llama 3 Herd of Models
Jul 31, 2024Modern artificial intelligence (AI) systems are powered by foundation models. This paper presents a new set of foundation models, called Llama 3. It is a herd of language models that natively support multilinguality, coding, reasoning, and tool usage. Our largest model is a dense Transformer with 405B parameters and a context window of up to 128K tokens. This paper presents an extensive empirical evaluation of Llama 3. We find that Llama 3 delivers comparable quality to leading language models such as GPT-4 on a plethora of tasks. We publicly release Llama 3, including pre-trained and post-trained versions of the 405B parameter language model and our Llama Guard 3 model for input and output safety. The paper also presents the results of experiments in which we integrate image, video, and speech capabilities into Llama 3 via a compositional approach. We observe this approach performs competitively with the state-of-the-art on image, video, and speech recognition tasks. The resulting models are not yet being broadly released as they are still under development.
Is Flash Attention Stable?
May 05, 2024



Training large-scale machine learning models poses distinct system challenges, given both the size and complexity of today's workloads. Recently, many organizations training state-of-the-art Generative AI models have reported cases of instability during training, often taking the form of loss spikes. Numeric deviation has emerged as a potential cause of this training instability, although quantifying this is especially challenging given the costly nature of training runs. In this work, we develop a principled approach to understanding the effects of numeric deviation, and construct proxies to put observations into context when downstream effects are difficult to quantify. As a case study, we apply this framework to analyze the widely-adopted Flash Attention optimization. We find that Flash Attention sees roughly an order of magnitude more numeric deviation as compared to Baseline Attention at BF16 when measured during an isolated forward pass. We then use a data-driven analysis based on the Wasserstein Distance to provide upper bounds on how this numeric deviation impacts model weights during training, finding that the numerical deviation present in Flash Attention is 2-5 times less significant than low-precision training.
Generative AI Beyond LLMs: System Implications of Multi-Modal Generation
Dec 22, 2023



As the development of large-scale Generative AI models evolve beyond text (1D) generation to include image (2D) and video (3D) generation, processing spatial and temporal information presents unique challenges to quality, performance, and efficiency. We present the first work towards understanding this new system design space for multi-modal text-to-image (TTI) and text-to-video (TTV) generation models. Current model architecture designs are bifurcated into 2 categories: Diffusion- and Transformer-based models. Our systematic performance characterization on a suite of eight representative TTI/TTV models shows that after state-of-the-art optimization techniques such as Flash Attention are applied, Convolution accounts for up to 44% of execution time for Diffusion-based TTI models, while Linear layers consume up to 49% of execution time for Transformer-based models. We additionally observe that Diffusion-based TTI models resemble the Prefill stage of LLM inference, and benefit from 1.1-2.5x greater speedup from Flash Attention than Transformer-based TTI models that resemble the Decode phase. Since optimizations designed for LLMs do not map directly onto TTI/TTV models, we must conduct a thorough characterization of these workloads to gain insights for new optimization opportunities. In doing so, we define sequence length in the context of TTI/TTV models and observe sequence length can vary up to 4x in Diffusion model inference. We additionally observe temporal aspects of TTV workloads pose unique system bottlenecks, with Temporal Attention accounting for over 60% of total Attention time. Overall, our in-depth system performance characterization is a critical first step towards designing efficient and deployable systems for emerging TTI/TTV workloads.
MAD Max Beyond Single-Node: Enabling Large Machine Learning Model Acceleration on Distributed Systems
Oct 18, 2023Training and deploying large machine learning (ML) models is time-consuming and requires significant distributed computing infrastructures. Based on real-world large model training on datacenter-scale infrastructures, we show 14~32% of all GPU hours are spent on communication with no overlapping computation. To minimize the outstanding communication latency, in this work, we develop an agile performance modeling framework to guide parallelization and hardware-software co-design strategies. Using the suite of real-world large ML models on state-of-the-art GPU training hardware, we demonstrate 2.24x and 5.27x throughput improvement potential for pre-training and inference scenarios, respectively.
A Theory on Adam Instability in Large-Scale Machine Learning
Apr 25, 2023



We present a theory for the previously unexplained divergent behavior noticed in the training of large language models. We argue that the phenomenon is an artifact of the dominant optimization algorithm used for training, called Adam. We observe that Adam can enter a state in which the parameter update vector has a relatively large norm and is essentially uncorrelated with the direction of descent on the training loss landscape, leading to divergence. This artifact is more likely to be observed in the training of a deep model with a large batch size, which is the typical setting of large-scale language model training. To argue the theory, we present observations from the training runs of the language models of different scales: 7 billion, 30 billion, 65 billion, and 546 billion parameters.
torch.fx: Practical Program Capture and Transformation for Deep Learning in Python
Dec 15, 2021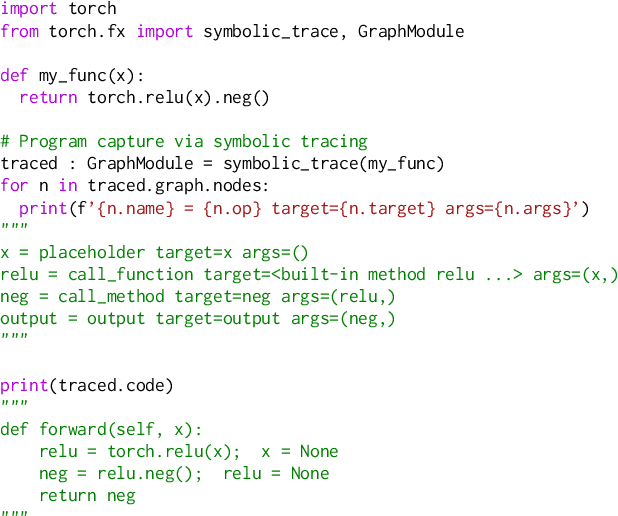
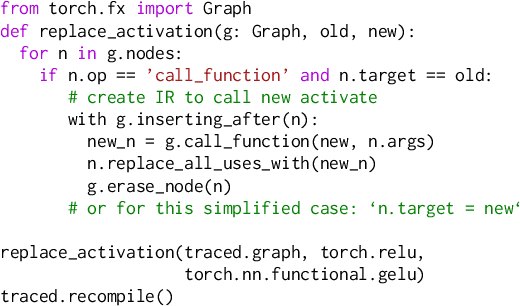
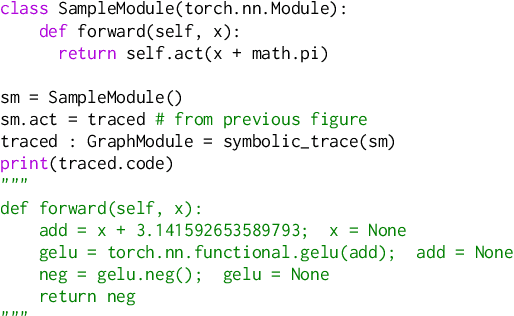
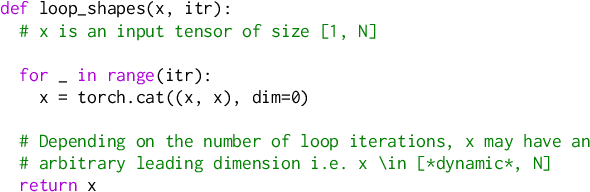
Modern deep learning frameworks provide imperative, eager execution programming interfaces embedded in Python to provide a productive development experience. However, deep learning practitioners sometimes need to capture and transform program structure for performance optimization, visualization, analysis, and hardware integration. We study the different designs for program capture and transformation used in deep learning. By designing for typical deep learning use cases rather than long tail ones, it is possible to create a simpler framework for program capture and transformation. We apply this principle in torch.fx, a program capture and transformation library for PyTorch written entirely in Python and optimized for high developer productivity by ML practitioners. We present case studies showing how torch.fx enables workflows previously inaccessible in the PyTorch ecosystem.
Using Python for Model Inference in Deep Learning
Apr 01, 2021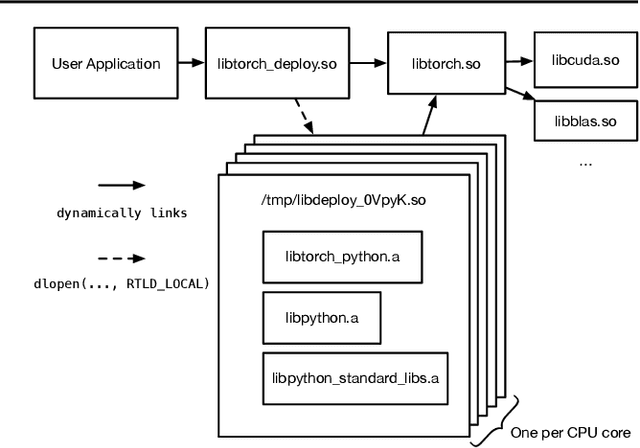
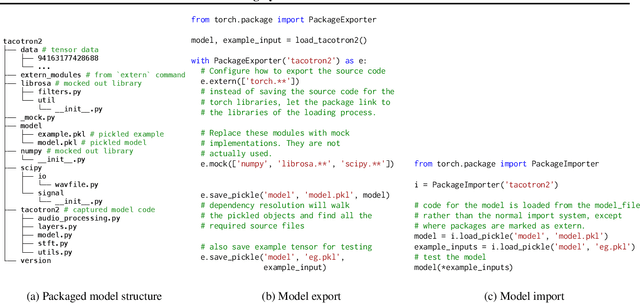
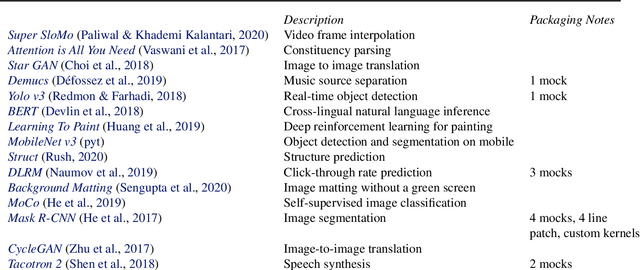
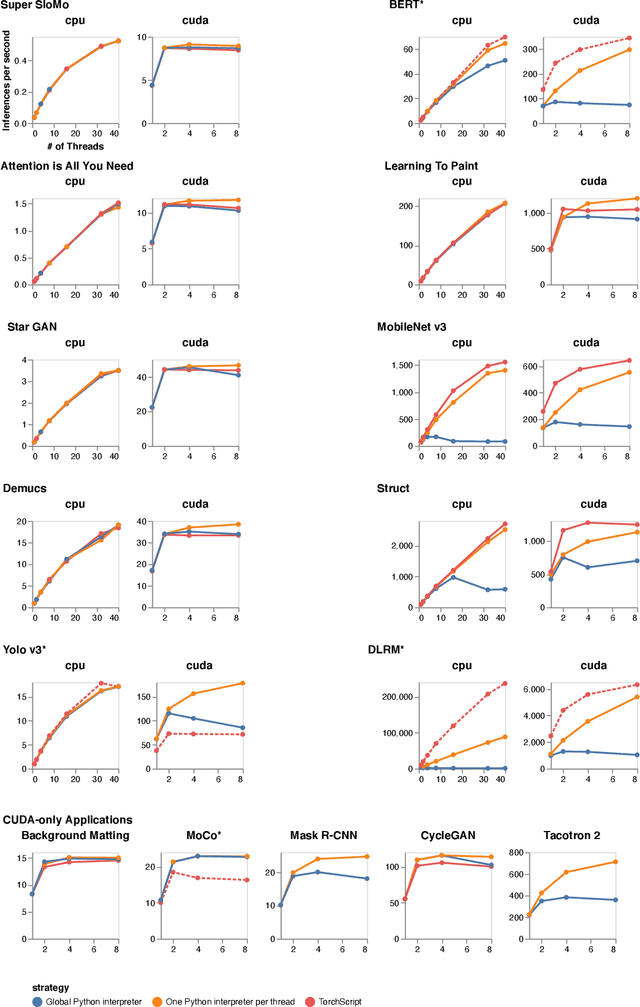
Python has become the de-facto language for training deep neural networks, coupling a large suite of scientific computing libraries with efficient libraries for tensor computation such as PyTorch or TensorFlow. However, when models are used for inference they are typically extracted from Python as TensorFlow graphs or TorchScript programs in order to meet performance and packaging constraints. The extraction process can be time consuming, impeding fast prototyping. We show how it is possible to meet these performance and packaging constraints while performing inference in Python. In particular, we present a way of using multiple Python interpreters within a single process to achieve scalable inference and describe a new container format for models that contains both native Python code and data. This approach simplifies the model deployment story by eliminating the model extraction step, and makes it easier to integrate existing performance-enhancing Python libraries. We evaluate our design on a suite of popular PyTorch models on Github, showing how they can be packaged in our inference format, and comparing their performance to TorchScript. For larger models, our packaged Python models perform the same as TorchScript, and for smaller models where there is some Python overhead, our multi-interpreter approach ensures inference is still scalable.
Tensor Comprehensions: Framework-Agnostic High-Performance Machine Learning Abstractions
Jun 29, 2018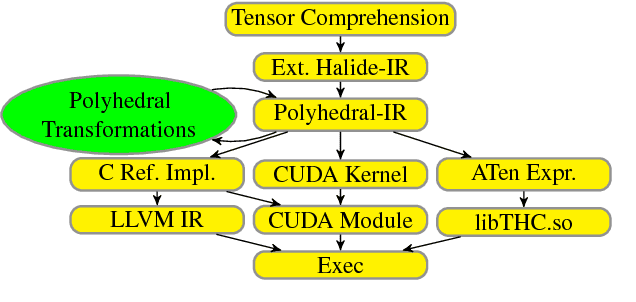
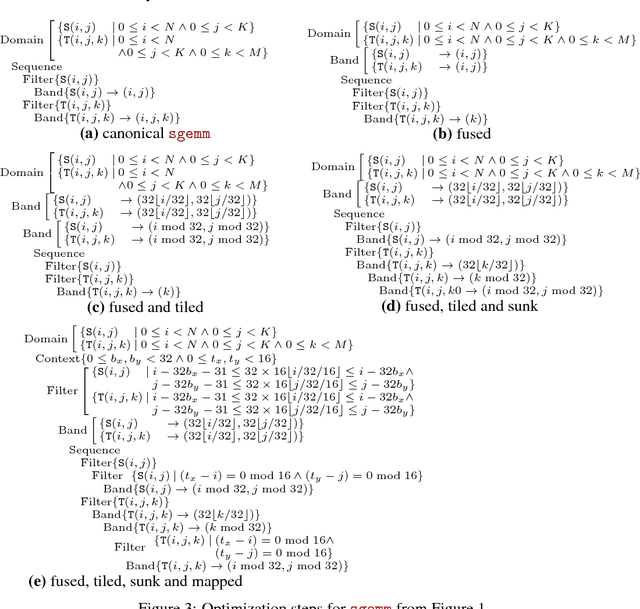
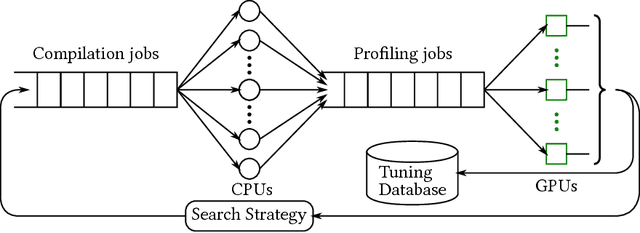
Deep learning models with convolutional and recurrent networks are now ubiquitous and analyze massive amounts of audio, image, video, text and graph data, with applications in automatic translation, speech-to-text, scene understanding, ranking user preferences, ad placement, etc. Competing frameworks for building these networks such as TensorFlow, Chainer, CNTK, Torch/PyTorch, Caffe1/2, MXNet and Theano, explore different tradeoffs between usability and expressiveness, research or production orientation and supported hardware. They operate on a DAG of computational operators, wrapping high-performance libraries such as CUDNN (for NVIDIA GPUs) or NNPACK (for various CPUs), and automate memory allocation, synchronization, distribution. Custom operators are needed where the computation does not fit existing high-performance library calls, usually at a high engineering cost. This is frequently required when new operators are invented by researchers: such operators suffer a severe performance penalty, which limits the pace of innovation. Furthermore, even if there is an existing runtime call these frameworks can use, it often doesn't offer optimal performance for a user's particular network architecture and dataset, missing optimizations between operators as well as optimizations that can be done knowing the size and shape of data. Our contributions include (1) a language close to the mathematics of deep learning called Tensor Comprehensions, (2) a polyhedral Just-In-Time compiler to convert a mathematical description of a deep learning DAG into a CUDA kernel with delegated memory management and synchronization, also providing optimizations such as operator fusion and specialization for specific sizes, (3) a compilation cache populated by an autotuner. [Abstract cutoff]