 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Human-Robot Collaborative Transportation via Trust-Driven Role Adaptation
Jul 13, 2022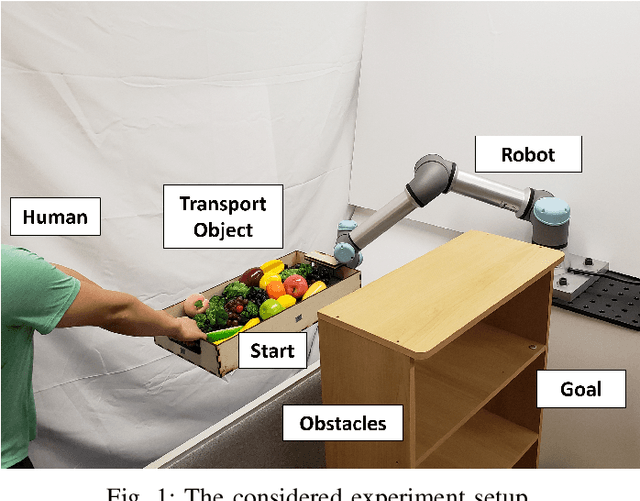
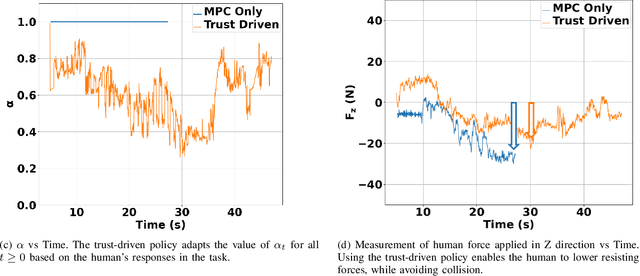
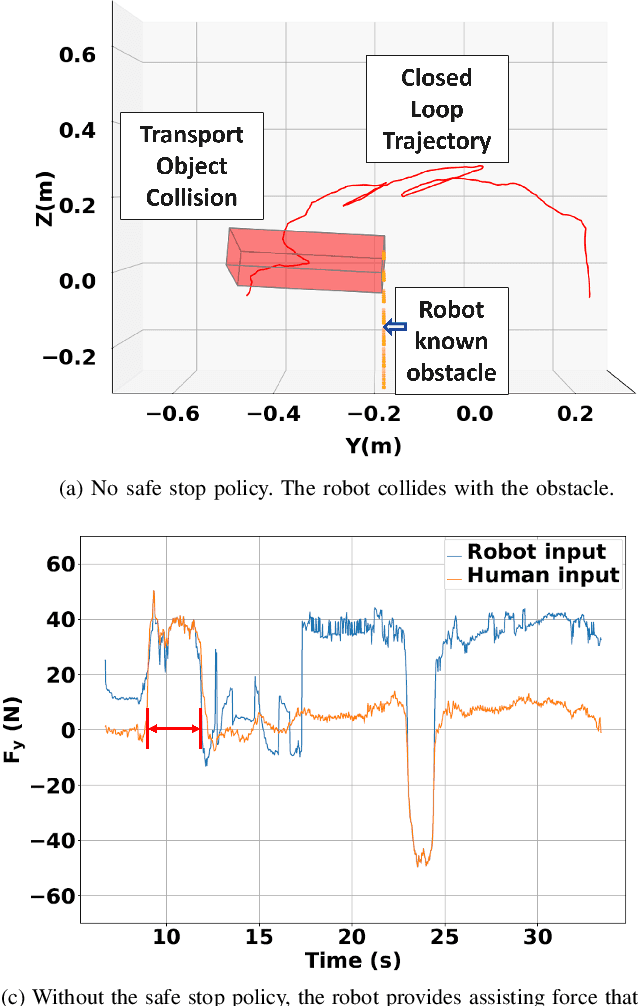
We study a human-robot collaborative transportation task in presence of obstacles. The task for each agent is to carry a rigid object to a common target position, while safely avoiding obstacles and satisfying the compliance and actuation constraints of the other agent. Human and robot do not share the local view of the environment. The human policy either assists the robot when they deem the robot actions safe based on their perception of the environment, or actively leads the task. Using estimated human inputs, the robot plans a trajectory for the transported object by solving a constrained finite time optimal control problem. Sensors on the robot measure the inputs applied by the human. The robot then appropriately applies a weighted combination of the human's applied and its own planned inputs, where the weights are chosen based on the robot's trust value on its estimates of the human's inputs. This allows for a dynamic leader-follower role adaptation of the robot throughout the task. Furthermore, under a low value of trust, if the robot approaches any obstacle potentially unknown to the human, it triggers a safe stopping policy, maintaining safety of the system and signaling a required change in the human's intent. With experimental results, we demonstrate the efficacy of the proposed approach.
Decentralized 2-Robot Transportation with Local and Indirect Sensing
Mar 07, 2021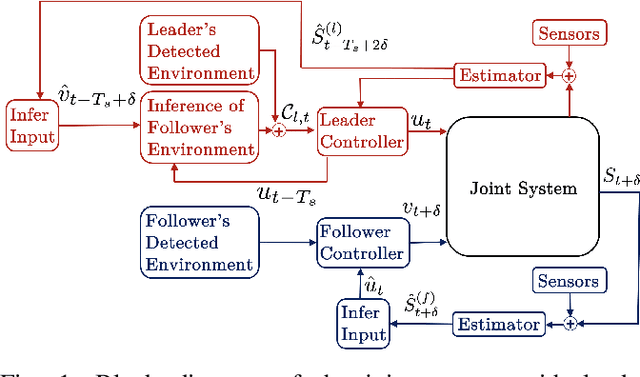
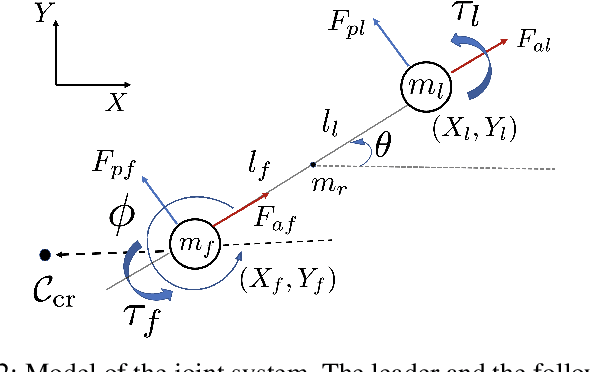
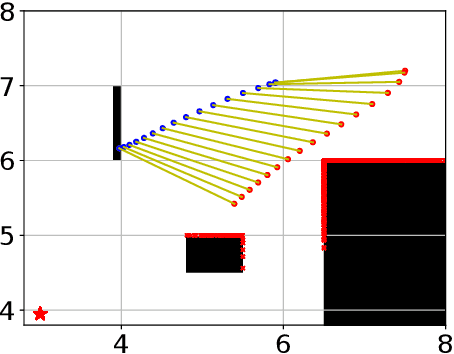
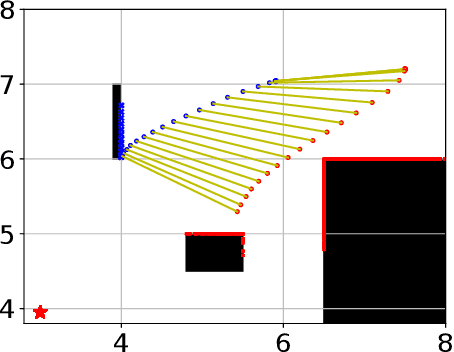
In this paper, we propose a leader-follower hierarchical strategy for two robots collaboratively transporting an object in a partially known environment with obstacles. Both robots sense the local surrounding environment and react to obstacles in their proximity. We consider no explicit communication, so the local environment information and the control actions are not shared between the robots. At any given time step, the leader solves a model predictive control (MPC) problem with its known set of obstacles and plans a feasible trajectory to complete the task. The follower estimates the inputs of the leader and uses a policy to assist the leader while reacting to obstacles in its proximity. The leader infers obstacles in the follower's vicinity by using the difference between the predicted and the real-time estimated follower control action. A method to switch the leader-follower roles is used to improve the control performance in tight environments. The efficacy of our approach is demonstrated with detailed comparisons to two alternative strategies, where it achieves the highest success rate, while completing the task fastest.
Parameter Identification for Digital Fabrication: A Gaussian Process Learning Approach
Dec 20, 2020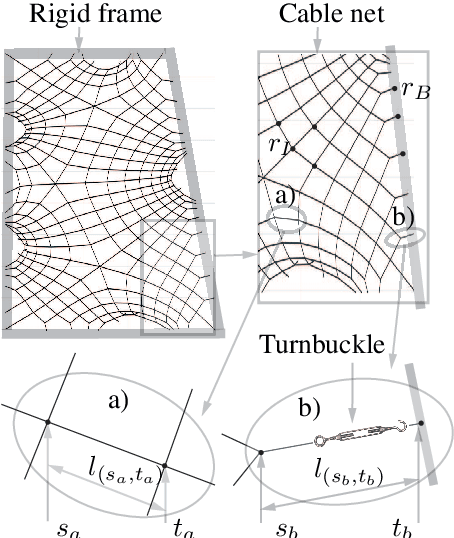
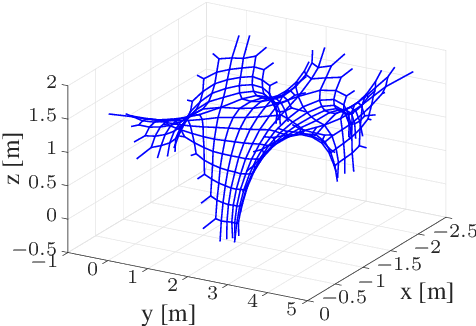
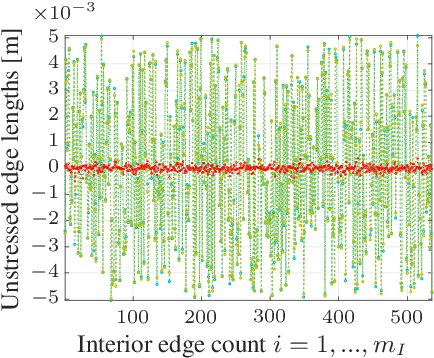
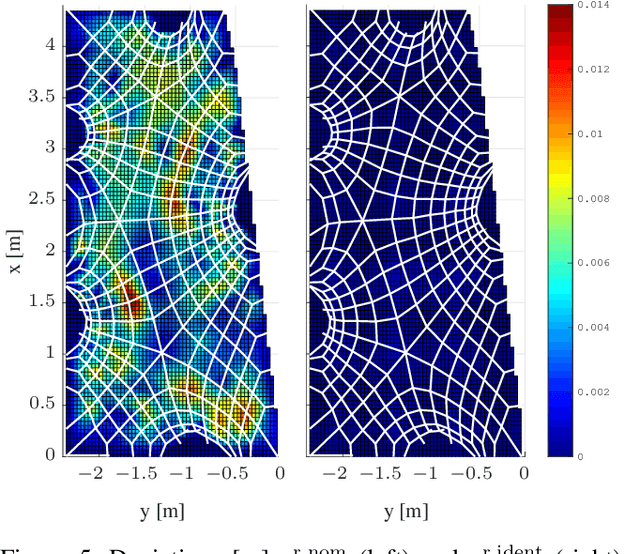
Tensioned cable nets can be used as supporting structures for the efficient construction of lightweight building elements, such as thin concrete shell structures. To guarantee important mechanical properties of the latter, the tolerances on deviations of the tensioned cable net geometry from the desired target form are very tight. Therefore, the form needs to be readjusted on the construction site. In order to employ model-based optimization techniques, the precise identification of important uncertain model parameters of the cable net system is required. This paper proposes the use of Gaussian process regression to learn the function that maps the cable net geometry to the uncertain parameters. In contrast to previously proposed methods, this approach requires only a single form measurement for the identification of the cable net model parameters. This is beneficial since measurements of the cable net form on the construction site are very expensive. For the training of the Gaussian processes, simulated data is efficiently computed via convex programming. The effectiveness of the proposed method and the impact of the precise identification of the parameters on the form of the cable net are demonstrated in numerical experiments on a quarter-scale prototype of a roof structure.
Collision Avoidance in Tightly-Constrained Environments without Coordination: a Hierarchical Control Approach
Nov 01, 2020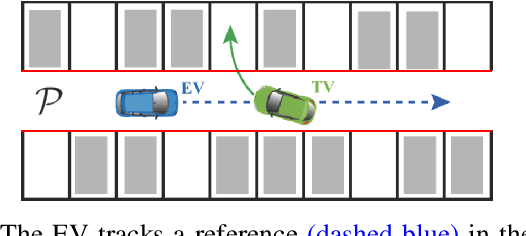
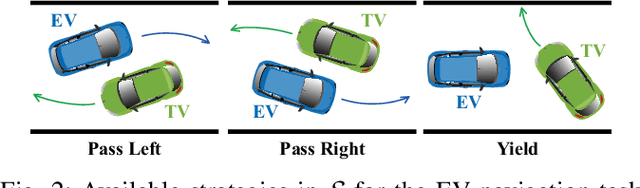
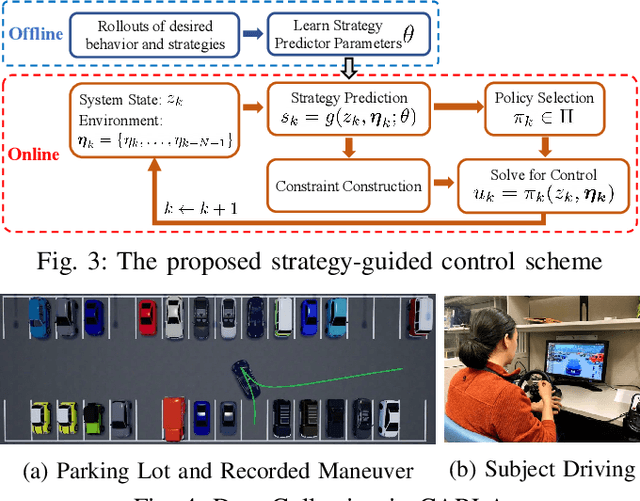
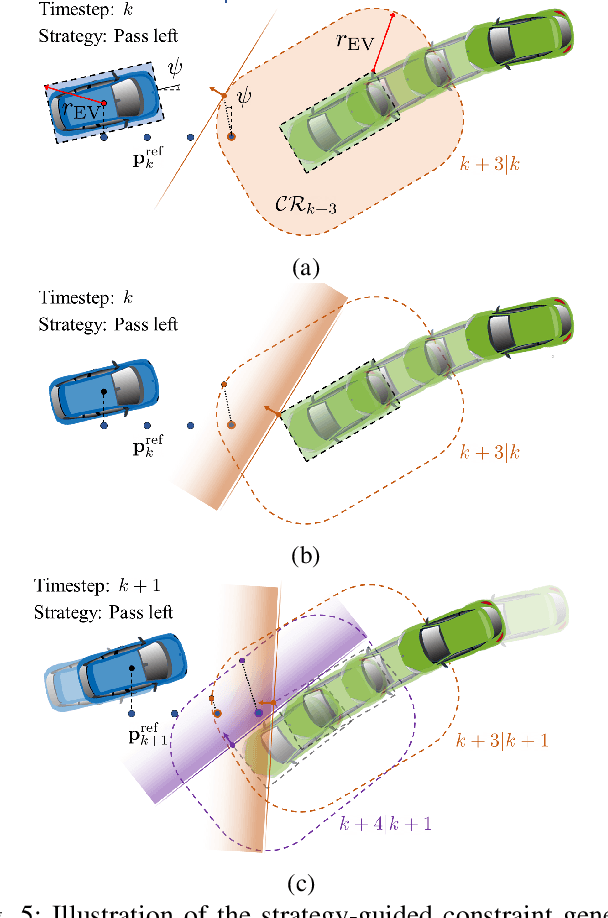
We present a hierarchical control approach for maneuvering an autonomous vehicle (AV) in a tightly-constrained environment where other moving AVs and/or human driven vehicles are present. A two-level hierarchy is proposed: a high-level data-driven strategy predictor and a lower-level model-based feedback controller. The strategy predictor maps a high-dimensional environment encoding into a set of high-level strategies. Our approach uses data collected on an offline simulator to train a neural network model as the strategy predictor. Depending on the online selected strategy, a set of time-varying hyperplanes in the AV's motion space is generated and included in the lower level control. The latter is a Strategy-Guided Optimization-Based Collision Avoidance (SG-OBCA) algorithm where the strategy-dependent hyperplane constraints are used to drive a model-based receding horizon controller towards a predicted feasible area. The strategy also informs switching from the SG-OBCA control policy to a safety or emergency control policy. We demonstrate the effectiveness of the proposed data-driven hierarchical control framework in simulations and experiments on a 1/10 scale autonomous car platform where the strategy-guided approach outperforms a model predictive control baseline in both cases.
Trajectory Optimization for Nonlinear Multi-Agent Systems using Decentralized Learning Model Predictive Control
Apr 02, 2020
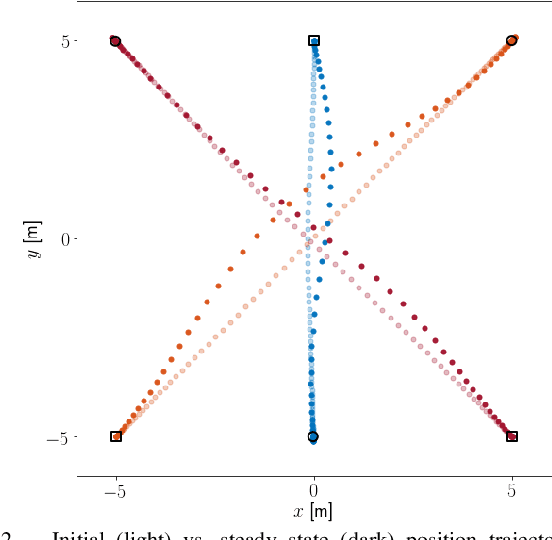
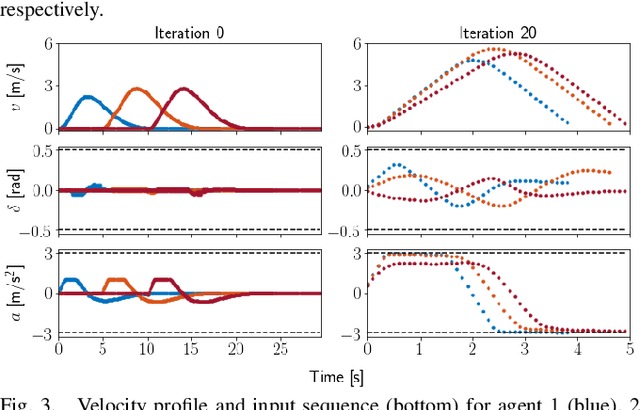
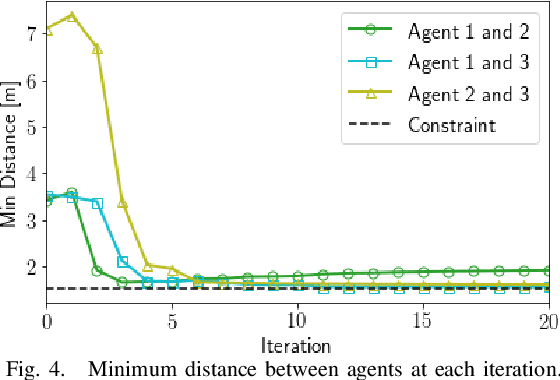
We present a decentralized trajectory optimization scheme based on learning model predictive control for multi-agent systems with nonlinear decoupled dynamics under separable cost and coupled state constraints. By performing the same task iteratively, data from previous task executions is used to construct and improve local time-varying safe sets and an approximate value function. These are used in a decentralized MPC problem as the terminal sets and terminal cost function. Our framework results in a decentralized controller, which requires no communication between agents over each iteration of task execution, and guarantees persistent feasibility, closed-loop stability, and non-decreasing performance of the global system over task iterations. Numerical experiments of a multi-vehicle collision avoidance scenario demonstrate the effectiveness of the proposed scheme.