 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZEST: Zero-shot Embodied Skill Transfer for Athletic Robot Control
Jan 30, 2026Achieving robust, human-like whole-body control on humanoid robots for agile, contact-rich behaviors remains a central challenge, demanding heavy per-skill engineering and a brittle process of tuning controllers. We introduce ZEST (Zero-shot Embodied Skill Transfer), a streamlined motion-imitation framework that trains policies via reinforcement learning from diverse sources -- high-fidelity motion capture, noisy monocular video, and non-physics-constrained animation -- and deploys them to hardware zero-shot. ZEST generalizes across behaviors and platforms while avoiding contact labels, reference or observation windows, state estimators, and extensive reward shaping. Its training pipeline combines adaptive sampling, which focuses training on difficult motion segments, and an automatic curriculum using a model-based assistive wrench, together enabling dynamic, long-horizon maneuvers. We further provide a procedure for selecting joint-level gains from approximate analytical armature values for closed-chain actuators, along with a refined model of actuators. Trained entirely in simulation with moderate domain randomization, ZEST demonstrates remarkable generality. On Boston Dynamics' Atlas humanoid, ZEST learns dynamic, multi-contact skills (e.g., army crawl, breakdancing) from motion capture. It transfers expressive dance and scene-interaction skills, such as box-climbing, directly from videos to Atlas and the Unitree G1. Furthermore, it extends across morphologies to the Spot quadruped, enabling acrobatics, such as a continuous backflip, through animation. Together, these results demonstrate robust zero-shot deployment across heterogeneous data sources and embodiments, establishing ZEST as a scalable interface between biological movements and their robotic counterparts.
WaspL: Design of a Reconfigurable Logistic Robot for Hospital Settings
Jul 07, 2021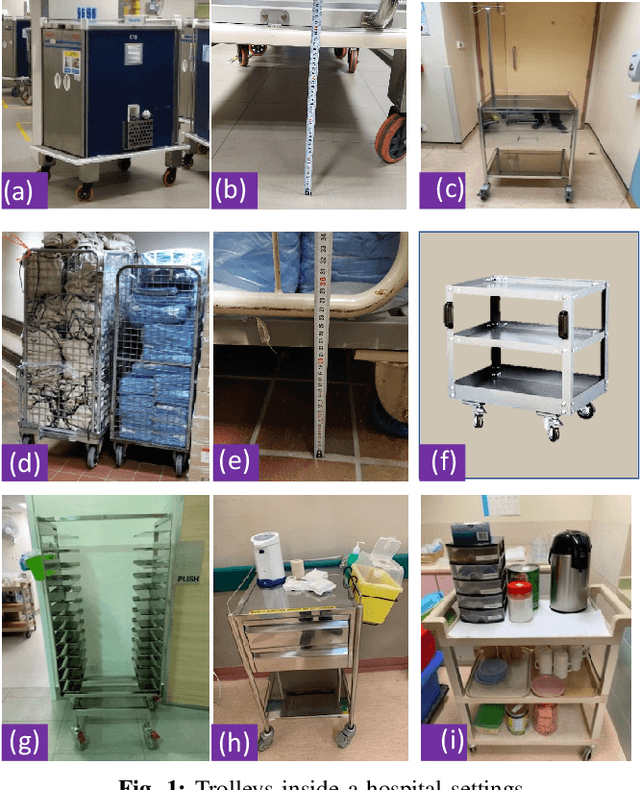
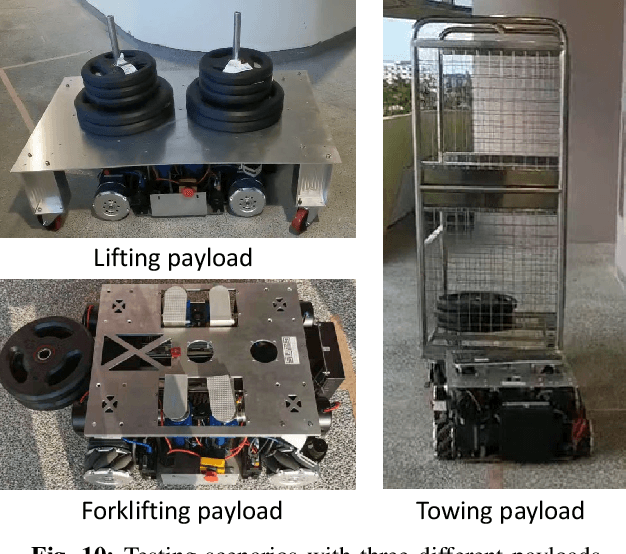
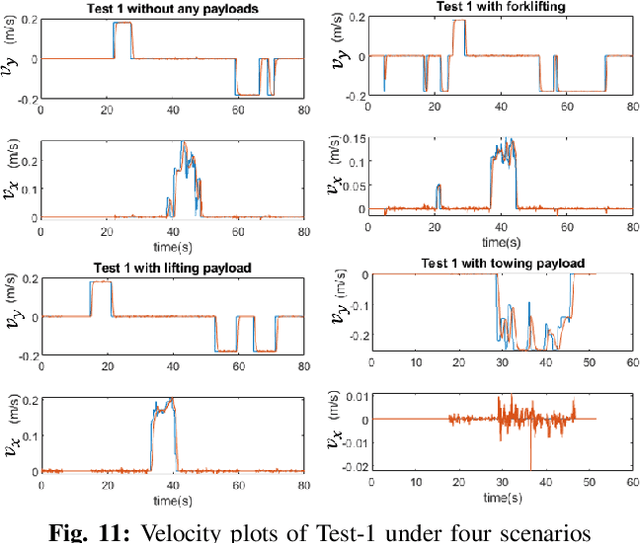
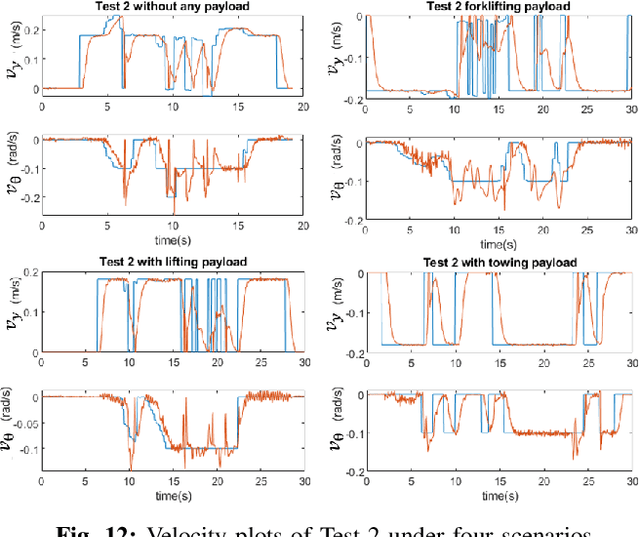
Healthcare poses diverse logistic requirements, which resulted in the deployment of several distinctly designed robots within a hospital setting. Each robot comes with its overheads in the form of, namely, none/limited scaling, dedicated charging stations, programming interface, closed architecture, training requirements, etc. This paper reports on developing a reconfigurable logistic robot named WaspL. The design of WaspL caters to the requirement of high mobility, open robotic operating system architecture, multi-functionality, and evolvability features. It fulfills multiple logistics modes, like towing, lifting heavy payloads, forklifting low ground clearance objects, nesting of two WaspL} etc., fulfilling different applications required in hospital settings. The design requirements, mechanical layout, and system architecture are discussed in detail. The finite element modeling, attribute-based comparison with other standard robots, are presented along with experimental results supporting the WaspL design capabilities.
Path tracking control of self-reconfigurable robot hTetro with four differential drive units
Nov 20, 2019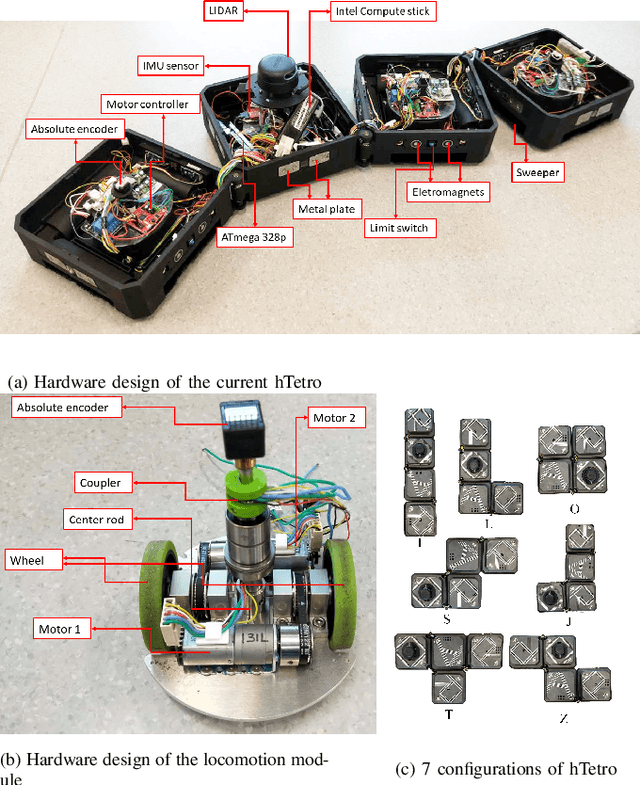
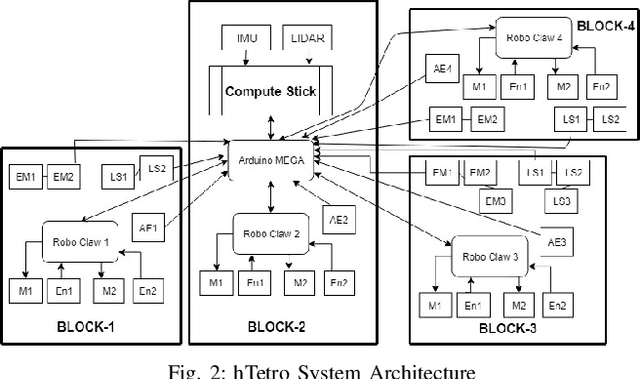
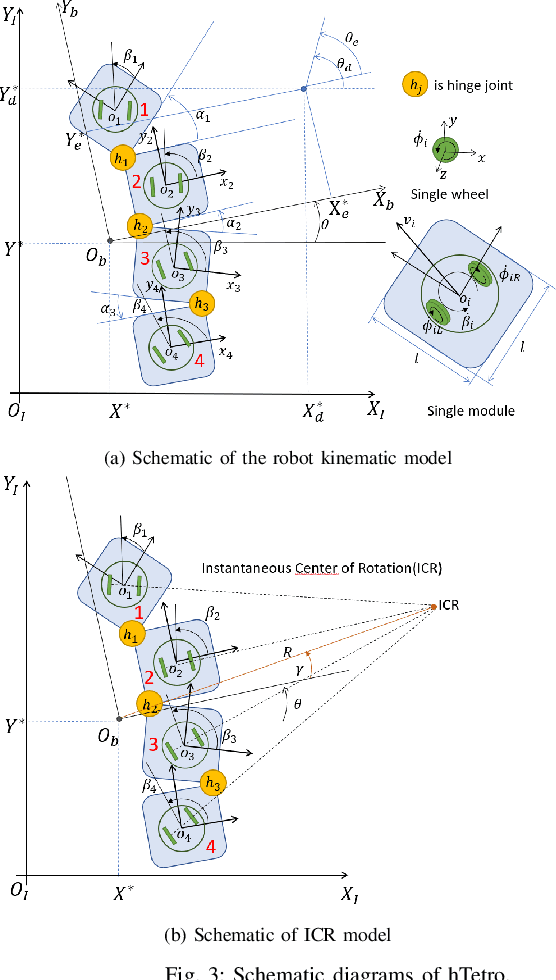
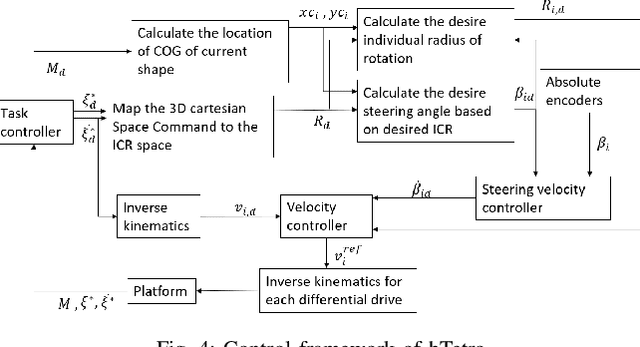
The research interest in robots with more than one steerable wheel has been increasing over recent years due to their high mobility while having a better payload capacity than systems using omnidirectional wheels. However, with more controllable degrees of freedom, almost all of the platforms include redundancy which leads to a modeling method based on the instantaneous center of rotation. The self-reconfigurable the robotic platform, hTetro, is designed for floor cleaning tasks. It also has four differential-drive units which can steer individually. Differing from most other steerable wheeled mobile robots, the wheel arrangement of this robot changes because of its reconfigurability. In this paper, we proposed a robust path tracking controller that can handle discontinuous trajectories and sudden orientation changes. Singularity problems are resolved on both the mechanical aspect and control aspect. The controller is tested experimentally with the self-reconfigurable robotic platform hTetro, and results are discussed.