 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIR-SIM: A Lightweight Skill-Native Simulator for Navigation, Learning, and Benchmarking
Jun 07, 2026Simulation plays a key role in automated robotics research supported by large language models (LLMs). However, existing simulators often require custom code or complex interfaces, creating a barrier to rapid prototyping and automated algorithm development. To this end, we propose the Intelligent Robot Simulator (IR-SIM), a lightweight skill-native navigation simulator designed for rapid scenario construction, benchmarking, and robot learning. In IR-SIM, scenarios are entirely defined by YAML configuration files that specify mobile robot kinematics, geometric collision checking, LiDAR sensing, visualization, and behavior modules. This design makes robotic simulation fully describable and reproducible, allowing scenarios to be generated and modified from text prompts through the proposed IR-SIM agent skills. The resulting scenarios can be used for automated benchmarking of navigation algorithms and for automated generation of training data for learning methods. Furthermore, IR-SIM provides bridges to high fidelity simulators and real world deployment, allowing users to validate their algorithms in more realistic settings after prototyping without extra coding. The experiments showcase the convenience and versatility of IR-SIM in multiple tasks: constructing navigation scenarios from natural language, training a collision avoidance policy, benchmarking social navigation policies, and bridging to high fidelity simulators and real world deployment. The project website is available at https://github.com/hanruihua/ir-sim.
Unveiling the Entropy Dynamics of Chain-of-Thought Reasoning
Jun 01, 2026This paper investigates the entropy dynamics of Chain-of-Thought (CoT) and uncovers a consistent two-phase structure: an Uncertainty Region of exploration transitioning sharply to a Confidence Region of convergence. We demonstrate that the Confidence Region possesses two critical properties: 1) High Reliability -- answers in the confidence region become highly accurate and stable, and 2) High Redundancy -- models generate unnecessary tokens long after reaching the correct answer. These properties unlock more efficient and reliable inference strategies: 1) Early Exit leverages reliability and redundancy to terminate computation safely when returns diminish, and 2)Test-Time Scaling uses the Confidence Region signal to prioritize converged trajectories. To operationalize these insights, we formulate Confidence Region detection as a sequential change-point detection problem, being the first to apply classical change-point methods to monitor CoT reasoning. Using the Cumulative Sum (CUSUM) algorithm, a statistically optimal change-point detector, we develop a training-free framework for real-time inference control. Experiments show our approach establishes a superior Pareto-frontier for early exit. CUSUM achieves 63.06% accuracy with 11.1% token reduction, outperforming DEER and Dynasor by 3.28% and 4.36% in accuracy respectively. For test-time scaling, CUSUM-weighted voting consistently outperforms self-consistency.
Shared Autonomy Assisted by Impedance-Driven Anisotropic Guidance Field
May 04, 2026Shared autonomy (SA) enables robots to infer human intent and assist in its achievement. While most research focuses on improving intent inference, it overlooks whether humans can understand the robot's intent in return. Without such mutual understanding, collaboration becomes less effective, degrading user experience and task performance. To address this gap, previous studies have explicitly conveyed the robot intent through additional interfaces, which remain unintuitive and limited in expressiveness. Inspired by impedance control, we propose Impedance-Driven Anisotropic Guidance Field Enhanced Shared Autonomy (IAGF-SA), a novel paradigm that extends SA with an embodied, physically-grounded communication channel. This channel adaptively modulates the robot's dynamic response to human input, enabling intuitive, continuous, physically-grounded robot intent communication while naturally guiding human actions. User studies across three scenarios and two teleoperation interfaces indicate that IAGF-SA improves task performance, human-robot agreement, and subjective experience, thus demonstrating its effectiveness in enhancing human-robot communication and collaboration.
RichMap: A Reachability Map Balancing Precision, Efficiency, and Flexibility for Rich Robot Manipulation Tasks
Apr 08, 2026This paper presents RichMap, a high-precision reachability map representation designed to balance efficiency and flexibility for versatile robot manipulation tasks. By refining the classic grid-based structure, we propose a streamlined approach that achieves performance close to compact map forms (e.g., RM4D) while maintaining structural flexibility. Our method utilizes theoretical capacity bounds on $\mathbb{S}^2$ (or $SO(3)$) to ensure rigorous coverage and employs an asynchronous pipeline for efficient construction. We validate the map against comprehensive metrics, pursuing high prediction accuracy ($>98\%$), low false positive rates ($1\sim2\%$), and fast large-batch query ($\sim$15 $μ$s/query). We extend the framework applications to quantify robot workspace similarity via maximum mean discrepancy (MMD) metrics and demonstrate energy-based guidance for diffusion policy transfer, achieving up to $26\%$ improvement for cross-embodiment scenarios in the block pushing experiment.
ModLaNets: Learning Generalisable Dynamics via Modularity and Physical Inductive Bias
Jul 04, 2022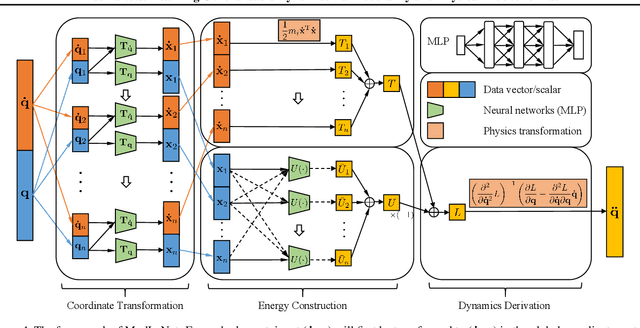
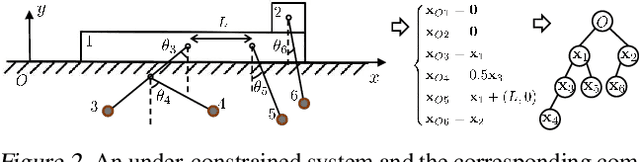
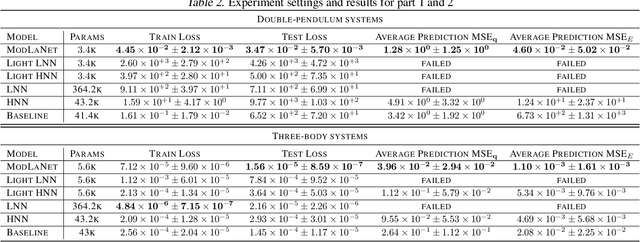
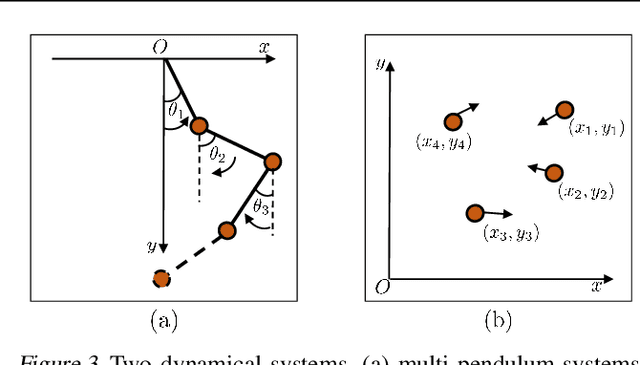
Deep learning models are able to approximate one specific dynamical system but struggle at learning generalisable dynamics, where dynamical systems obey the same laws of physics but contain different numbers of elements (e.g., double- and triple-pendulum systems). To relieve this issue, we proposed the Modular Lagrangian Network (ModLaNet), a structural neural network framework with modularity and physical inductive bias. This framework models the energy of each element using modularity and then construct the target dynamical system via Lagrangian mechanics. Modularity is beneficial for reusing trained networks and reducing the scale of networks and datasets. As a result, our framework can learn from the dynamics of simpler systems and extend to more complex ones, which is not feasible using other relevant physics-informed neural networks. We examine our framework for modelling double-pendulum or three-body systems with small training datasets, where our models achieve the best data efficiency and accuracy performance compared with counterparts. We also reorganise our models as extensions to model multi-pendulum and multi-body systems, demonstrating the intriguing reusable feature of our framework.