 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Retrieval Components for a Shared Backbone via Component-Wise Multi-Stage Training
Jan 31, 2026Recent advances in embedding-based retrieval have enabled dense retrievers to serve as core infrastructure in many industrial systems, where a single retrieval backbone is often shared across multiple downstream applications. In such settings, retrieval quality directly constrains system performance and extensibility, while coupling model selection, deployment, and rollback decisions across applications. In this paper, we present empirical findings and a system-level solution for optimizing retrieval components deployed as a shared backbone in production legal retrieval systems. We adopt a multi-stage optimization framework for dense retrievers and rerankers, and show that different retrieval components exhibit stage-dependent trade-offs. These observations motivate a component-wise, mixed-stage configuration rather than relying on a single uniformly optimal checkpoint. The resulting backbone is validated through end-to-end evaluation and deployed as a shared retrieval service supporting multiple industrial applications.
LegalMALR:Multi-Agent Query Understanding and LLM-Based Reranking for Chinese Statute Retrieval
Jan 25, 2026Statute retrieval is essential for legal assistance and judicial decision support, yet real-world legal queries are often implicit, multi-issue, and expressed in colloquial or underspecified forms. These characteristics make it difficult for conventional retrieval-augmented generation pipelines to recover the statutory elements required for accurate retrieval. Dense retrievers focus primarily on the literal surface form of the query, whereas lightweight rerankers lack the legal-reasoning capacity needed to assess statutory applicability. We present LegalMALR, a retrieval framework that integrates a Multi-Agent Query Understanding System (MAS) with a zero-shot large-language-model-based reranking module (LLM Reranker). MAS generates diverse, legally grounded reformulations and conducts iterative dense retrieval to broaden candidate coverage. To stabilise the stochastic behaviour of LLM-generated rewrites, we optimise a unified MAS policy using Generalized Reinforcement Policy Optimization(GRPO). The accumulated candidate set is subsequently evaluated by the LLM Reranker, which performs natural-language legal reasoning to produce the final ranking. We further construct CSAID, a dataset of 118 difficult Chinese legal queries annotated with multiple statutory labels, and evaluate LegalMALR on both CSAID and the public STARD benchmark. Experiments show that LegalMALR substantially outperforms strong Retrieval-augmented generation(RAG) baselines in both in-distribution and out-of-distribution settings, demonstrating the effectiveness of combining multi-perspective query interpretation, reinforcement-based policy optimisation, and large-model reranking for statute retrieval.
Fast Bilateral Teleoperation and Imitation Learning Using Sensorless Force Control via Accurate Dynamics Model
Jul 08, 2025



In recent years, the advancement of imitation learning has led to increased interest in teleoperating low-cost manipulators to collect demonstration data. However, most existing systems rely on unilateral control, which only transmits target position values. While this approach is easy to implement and suitable for slow, non-contact tasks, it struggles with fast or contact-rich operations due to the absence of force feedback. This work demonstrates that fast teleoperation with force feedback is feasible even with force-sensorless, low-cost manipulators by leveraging 4-channel bilateral control. Based on accurately identified manipulator dynamics, our method integrates nonlinear terms compensation, velocity and external force estimation, and variable gain corresponding to inertial variation. Furthermore, using data collected by 4-channel bilateral control, we show that incorporating force information into both the input and output of learned policies improves performance in imitation learning. These results highlight the practical effectiveness of our system for high-fidelity teleoperation and data collection on affordable hardware.
Motion Generation for Food Topping Challenge 2024: Serving Salmon Roe Bowl and Picking Fried Chicken
Apr 30, 2025



Although robots have been introduced in many industries, food production robots are yet to be widely employed because the food industry requires not only delicate movements to handle food but also complex movements that adapt to the environment. Force control is important for handling delicate objects such as food. In addition, achieving complex movements is possible by making robot motions based on human teachings. Four-channel bilateral control is proposed, which enables the simultaneous teaching of position and force information. Moreover, methods have been developed to reproduce motions obtained through human teachings and generate adaptive motions using learning. We demonstrated the effectiveness of these methods for food handling tasks in the Food Topping Challenge at the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024). For the task of serving salmon roe on rice, we achieved the best performance because of the high reproducibility and quick motion of the proposed method. Further, for the task of picking fried chicken, we successfully picked the most pieces of fried chicken among all participating teams. This paper describes the implementation and performance of these methods.
Incorporating Like-Minded Peers to Overcome Friend Data Sparsity in Session-Based Social Recommendations
Sep 04, 2024



Session-based Social Recommendation (SSR) leverages social relationships within online networks to enhance the performance of Session-based Recommendation (SR). However, existing SSR algorithms often encounter the challenge of ``friend data sparsity''. Moreover, significant discrepancies can exist between the purchase preferences of social network friends and those of the target user, reducing the influence of friends relative to the target user's own preferences. To address these challenges, this paper introduces the concept of ``Like-minded Peers'' (LMP), representing users whose preferences align with the target user's current session based on their historical sessions. This is the first work, to our knowledge, that uses LMP to enhance the modeling of social influence in SSR. This approach not only alleviates the problem of friend data sparsity but also effectively incorporates users with similar preferences to the target user. We propose a novel model named Transformer Encoder with Graph Attention Aggregator Recommendation (TEGAARec), which includes the TEGAA module and the GAT-based social aggregation module. The TEGAA module captures and merges both long-term and short-term interests for target users and LMP users. Concurrently, the GAT-based social aggregation module is designed to aggregate the target users' dynamic interests and social influence in a weighted manner. Extensive experiments on four real-world datasets demonstrate the efficacy and superiority of our proposed model and ablation studies are done to illustrate the contributions of each component in TEGAARec.
Thermal Infrared Image Colorization for Nighttime Driving Scenes with Top-Down Guided Attention
Apr 29, 2021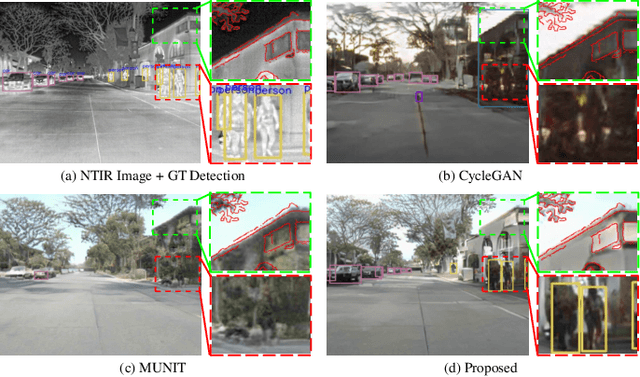
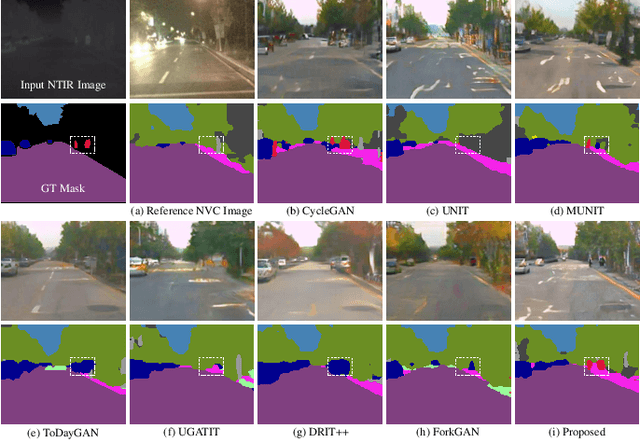

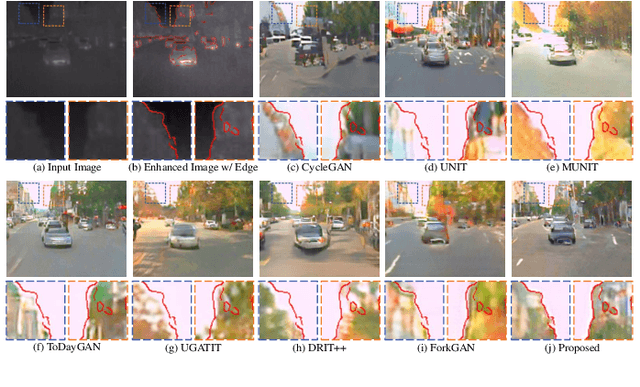
Benefitting from insensitivity to light and high penetration of foggy environments, infrared cameras are widely used for sensing in nighttime traffic scenes. However, the low contrast and lack of chromaticity of thermal infrared (TIR) images hinder the human interpretation and portability of high-level computer vision algorithms. Colorization to translate a nighttime TIR image into a daytime color (NTIR2DC) image may be a promising way to facilitate nighttime scene perception. Despite recent impressive advances in image translation, semantic encoding entanglement and geometric distortion in the NTIR2DC task remain under-addressed. Hence, we propose a toP-down attEntion And gRadient aLignment based GAN, referred to as PearlGAN. A top-down guided attention module and an elaborate attentional loss are first designed to reduce the semantic encoding ambiguity during translation. Then, a structured gradient alignment loss is introduced to encourage edge consistency between the translated and input images. In addition, pixel-level annotation is carried out on a subset of FLIR and KAIST datasets to evaluate the semantic preservation performance of multiple translation methods. Furthermore, a new metric is devised to evaluate the geometric consistency in the translation process. Extensive experiments demonstrate the superiority of the proposed PearlGAN over other image translation methods for the NTIR2DC task. The source code and labeled segmentation masks will be available at \url{https://github.com/FuyaLuo/PearlGAN/}.