 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge6-DoF Contrastive Grasp Proposal Network
Mar 29, 2021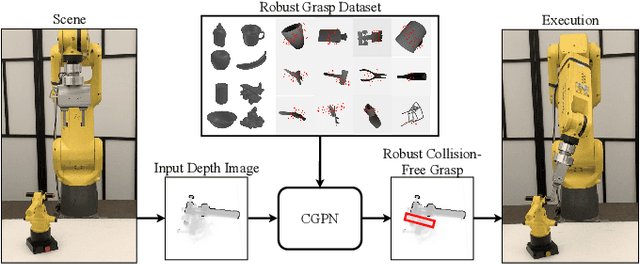
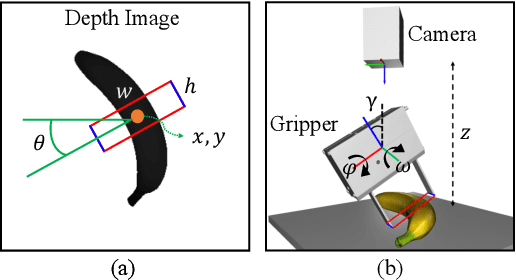
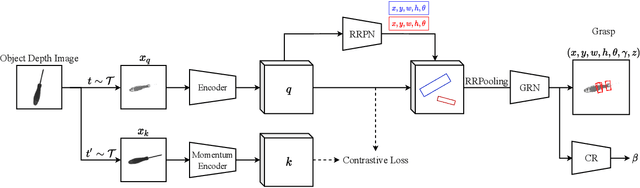
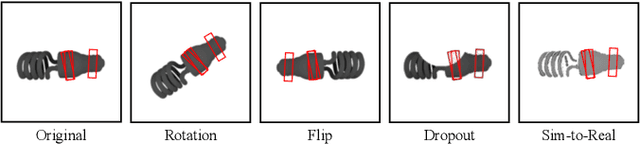
Proposing grasp poses for novel objects is an essential component for any robot manipulation task. Planning six degrees of freedom (DoF) grasps with a single camera, however, is challenging due to the complex object shape, incomplete object information, and sensor noise. In this paper, we present a 6-DoF contrastive grasp proposal network (CGPN) to infer 6-DoF grasps from a single-view depth image. First, an image encoder is used to extract the feature map from the input depth image, after which 3-DoF grasp regions are proposed from the feature map with a rotated region proposal network. Feature vectors that within the proposed grasp regions are then extracted and refined to 6-DoF grasps. The proposed model is trained offline with synthetic grasp data. To improve the robustness in reality and bridge the simulation-to-real gap, we further introduce a contrastive learning module and variant image processing techniques during the training. CGPN can locate collision-free grasps of an object using a single-view depth image within 0.5 seconds. Experiments on a physical robot further demonstrate the effectiveness of the algorithm.
A Learning Framework for High Precision Industrial Assembly
Apr 15, 2019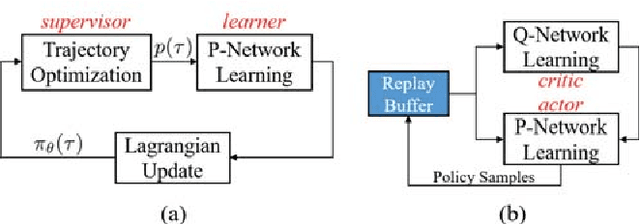
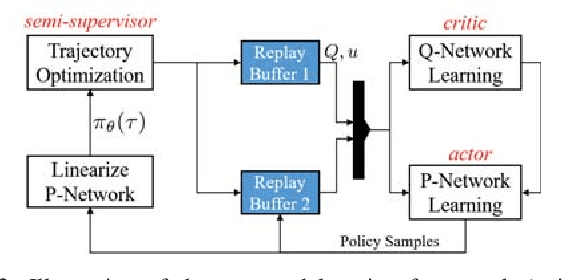
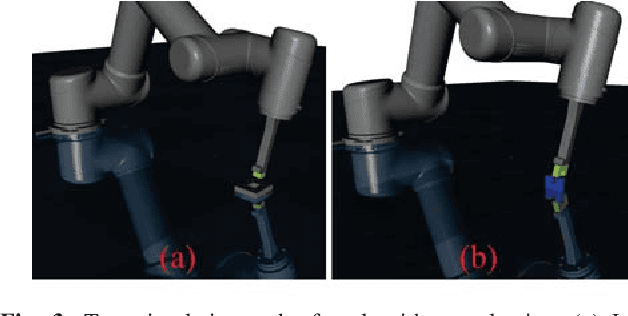
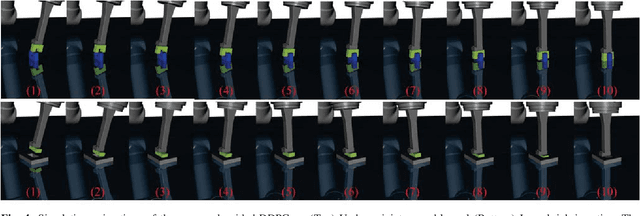
Automatic assembly has broad applications in industries. Traditional assembly tasks utilize predefined trajectories or tuned force control parameters, which make the automatic assembly time-consuming, difficult to generalize, and not robust to uncertainties. In this paper, we propose a learning framework for high precision industrial assembly. The framework combines both the supervised learning and the reinforcement learning. The supervised learning utilizes trajectory optimization to provide the initial guidance to the policy, while the reinforcement learning utilizes actor-critic algorithm to establish the evaluation system even the supervisor is not accurate. The proposed learning framework is more efficient compared with the reinforcement learning and achieves better stability performance than the supervised learning. The effectiveness of the method is verified by both the simulation and experiment.
Optimization Model for Planning Precision Grasps with Multi-Fingered Hands
Apr 15, 2019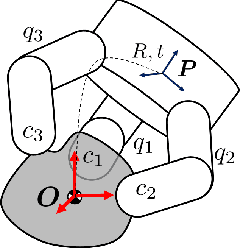
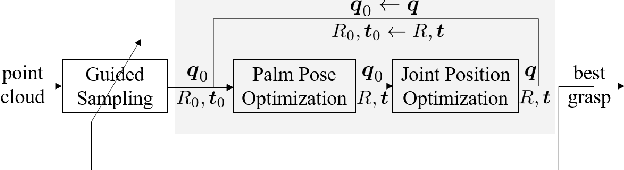
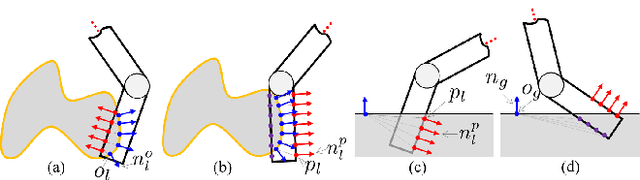
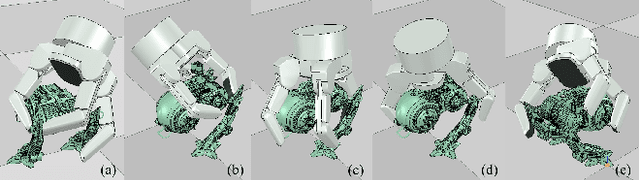
Precision grasps with multi-fingered hands are important for precise placement and in-hand manipulation tasks. Searching precision grasps on the object represented by point cloud, is challenging due to the complex object shape, high-dimensionality, collision and undesired properties of the sensing and positioning. This paper proposes an optimization model to search for precision grasps with multi-fingered hands. The model takes noisy point cloud of the object as input and optimizes the grasp quality by iteratively searching for the palm pose and finger joints positions. The collision between the hand and the object is approximated and penalized by a series of least-squares. The collision approximation is able to handle the point cloud representation of the objects with complex shapes. The proposed optimization model is able to locate collision-free optimal precision grasps efficiently. The average computation time is 0.50 sec/grasp. The searching is robust to the incompleteness and noise of the point cloud. The effectiveness of the algorithm is demonstrated by experiments.
A Learning Framework for Robust Bin Picking by Customized Grippers
Mar 05, 2019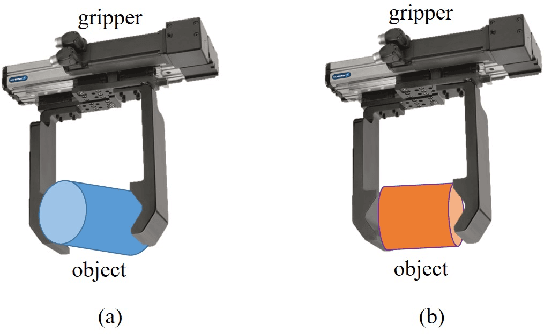
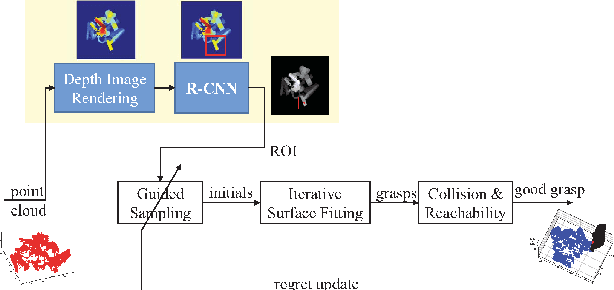
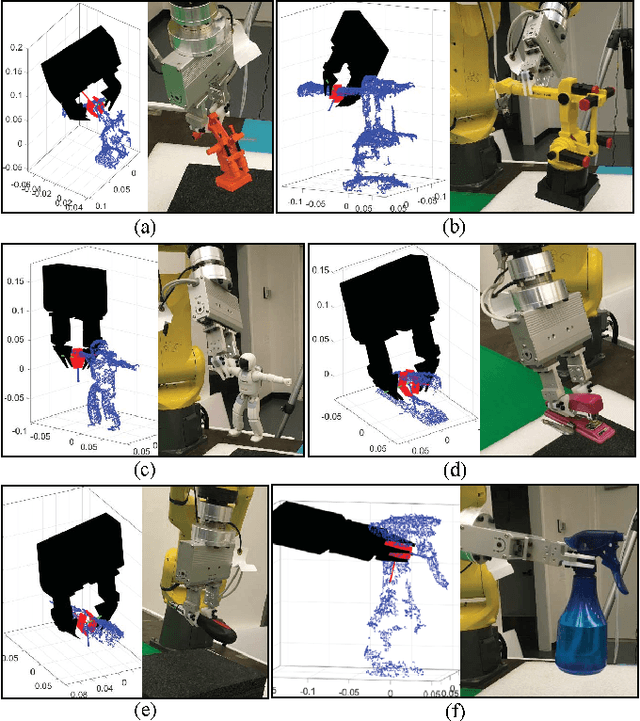
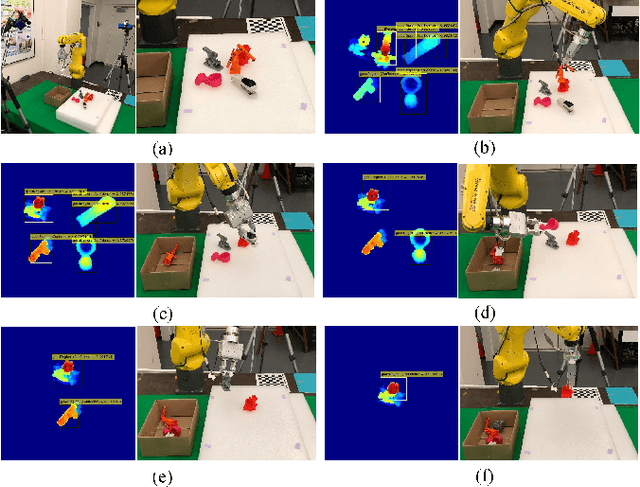
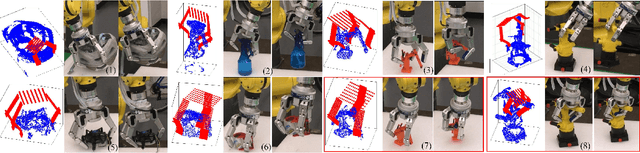
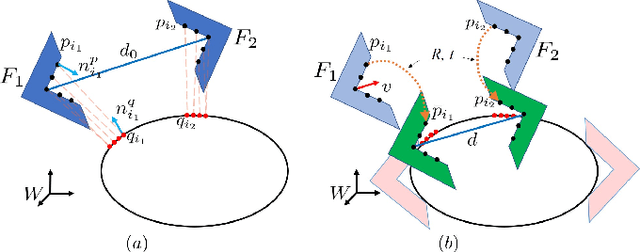
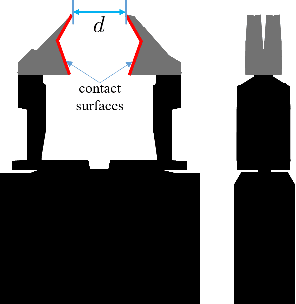
Customized grippers have specifically designed fingers to increase the contact area with the workpieces and improve the grasp robustness. However, grasp planning for customized grippers is challenging due to the object variations, surface contacts and structural constraints of the grippers. In this paper, we propose a learning framework to plan robust grasps for customized grippers in real-time. The learning framework contains a low-level optimization-based planner to search for optimal grasps locally under object shape variations, and a high-level learning-based explorer to learn the grasp exploration based on previous grasp experience. The optimization-based planner uses an iterative surface fitting (ISF) to simultaneously search for optimal gripper transformation and finger displacement by minimizing the surface fitting error. The high-level learning-based explorer trains a region-based convolutional neural network (R-CNN) to propose good optimization regions, which avoids ISF getting stuck in bad local optima and improves the collision avoidance performance. The proposed learning framework with RCNN-ISF is able to consider the structural constraints of the gripper, learn grasp exploration strategy from previous experience, and plan optimal grasps in clutter environment in real-time. The effectiveness of the algorithm is verified by experiments.
Efficient Grasp Planning and Execution with Multi-Fingered Hands by Surface Fitting
Feb 28, 2019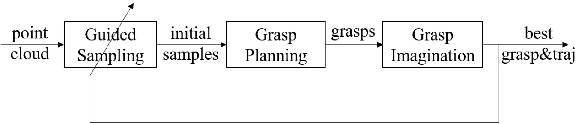
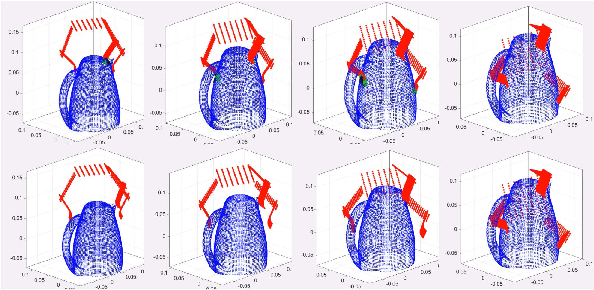

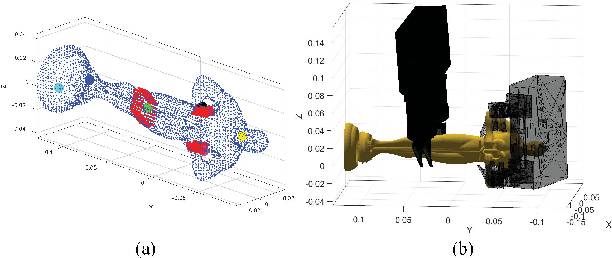
This paper introduces a framework to plan grasps with multi-fingered hands. The framework includes a multi-dimensional iterative surface fitting (MDISF) for grasp planning and a grasp trajectory optimization (GTO) for grasp imagination. The MDISF algorithm searches for optimal contact regions and hand configurations by minimizing the collision and surface fitting error, and the GTO algorithm generates optimal finger trajectories to reach the highly ranked grasp configurations and avoid collision with the environment. The proposed grasp planning and imagination framework considers the collision avoidance and the kinematics of the hand-robot system, and is able to plan grasps and trajectories of different categories efficiently with gradient-based methods using the captured point cloud. The found grasps and trajectories are robust to sensing noises and underlying uncertainties. The effectiveness of the proposed framework is verified by both simulations and experiments.
Grasp Planning for Customized Grippers by Iterative Surface Fitting
Jul 28, 2018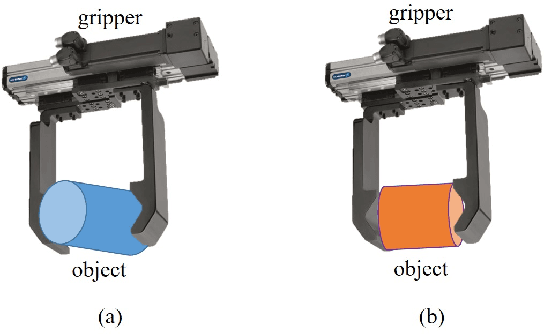
Customized grippers have broad applications in industrial assembly lines. Compared with general parallel grippers, the customized grippers have specifically designed fingers to increase the contact area with the workpieces and improve the grasp robustness. However, grasp planning for customized grippers is challenging due to the object variations, surface contacts and structural constraints of the grippers. In this paper, an iterative surface fitting (ISF) algorithm is proposed to plan grasps for customized grippers. ISF simultaneously searches for optimal gripper transformation and finger displacement by minimizing the surface fitting error. A guided sampling is introduced to avoid ISF getting stuck in local optima and improve the collision avoidance performance. The proposed algorithm is able to consider the structural constraints of the gripper and plan optimal grasps in real-time. The effectiveness of the algorithm is verified by both simulations and experiments. The experimental videos are available at: http://me.berkeley.edu/\%7Eyongxiangfan/CASE2018/caseisf.html
Real-Time Grasp Planning for Multi-Fingered Hands by Finger Splitting
Jul 28, 2018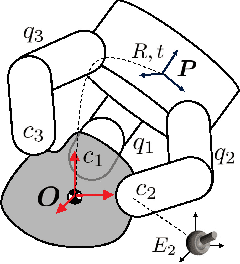

Grasp planning for multi-fingered hands is computationally expensive due to the joint-contact coupling, surface nonlinearities and high dimensionality, thus is generally not affordable for real-time implementations. Traditional planning methods by optimization, sampling or learning work well in planning for parallel grippers but remain challenging for multi-fingered hands. This paper proposes a strategy called finger splitting, to plan precision grasps for multi-fingered hands starting from optimal parallel grasps. The finger splitting is optimized by a dual-stage iterative optimization including a contact point optimization (CPO) and a palm pose optimization (PPO), to gradually split fingers and adjust both the contact points and the palm pose. The dual-stage optimization is able to consider both the object grasp quality and hand manipulability, address the nonlinearities and coupling, and achieve efficient convergence within one second. Simulation results demonstrate the effectiveness of the proposed approach. The simulation video is available at: http://me.berkeley.edu/\%7Eyongxiangfan/IROS2018/fingersplit.html
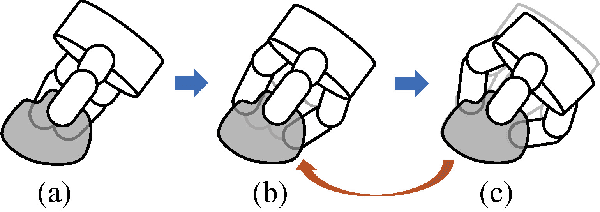
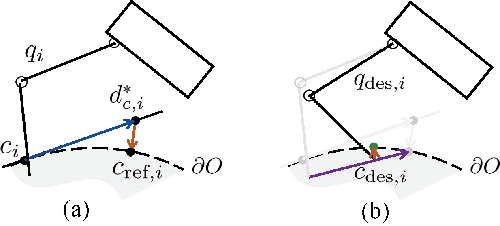
Real-Time Robust Finger Gaits Planning under Object Shape and Dynamics Uncertainties
Oct 27, 2017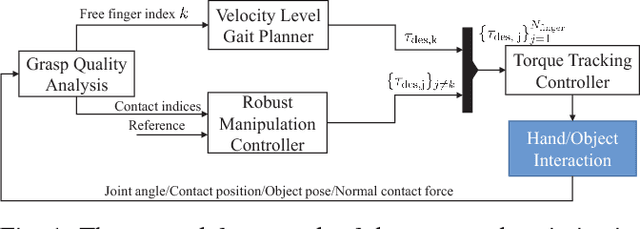
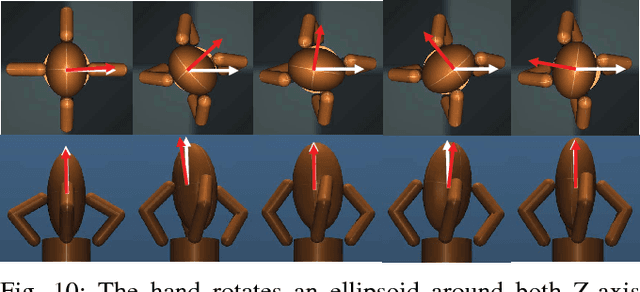
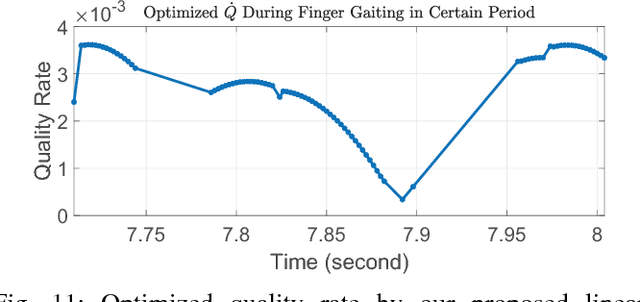
Dexterous manipulation has broad applications in assembly lines, warehouses and agriculture. To perform large-scale manipulation tasks for various objects, a multi-fingered robotic hand sometimes has to sequentially adjust its grasping gestures, i.e. the finger gaits, to address the workspace limits and guarantee the object stability. However, realizing finger gaits planning in dexterous manipulation is challenging due to the complicated grasp quality metrics, uncertainties on object shapes and dynamics (mass and moment of inertia), and unexpected slippage under uncertain contact dynamics. In this paper, a dual-stage optimization based planner is proposed to handle these challenges. In the first stage, a velocity-level finger gaits planner is introduced by combining object grasp quality with hand manipulability. The proposed finger gaits planner is computationally efficient and realizes finger gaiting without 3D model of the object. In the second stage, a robust manipulation controller using robust control and force optimization is proposed to address object dynamics uncertainties and external disturbances. The dual-stage planner is able to guarantee stability under unexpected slippage caused by uncertain contact dynamics. Moreover, it does not require velocity measurement or expensive 3D/6D tactile sensors. The proposed dual-stage optimization based planner is verified by simulations on Mujoco.