 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic-aware Transmission Scheduling: a Monotonicity-driven Deep Reinforcement Learning Approach
May 23, 2023For cyber-physical systems in the 6G era, semantic communications connecting distributed devices for dynamic control and remote state estimation are required to guarantee application-level performance, not merely focus on communication-centric performance. Semantics here is a measure of the usefulness of information transmissions. Semantic-aware transmission scheduling of a large system often involves a large decision-making space, and the optimal policy cannot be obtained by existing algorithms effectively. In this paper, we first investigate the fundamental properties of the optimal semantic-aware scheduling policy and then develop advanced deep reinforcement learning (DRL) algorithms by leveraging the theoretical guidelines. Our numerical results show that the proposed algorithms can substantially reduce training time and enhance training performance compared to benchmark algorithms.
Matrix Factorization Based Blind Bayesian Receiver for Grant-Free Random Access in mmWave MIMO mMTC
Apr 10, 2023



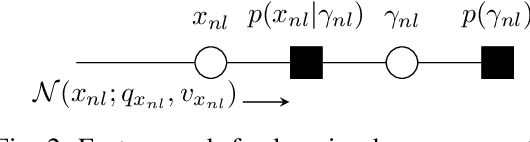
Grant-free random access is promising for massive connectivity with sporadic transmissions in massive machine type communications (mMTC), where the hand-shaking between the access point (AP) and users is skipped, leading to high access efficiency. In grant-free random access, the AP needs to identify the active users and perform channel estimation and signal detection. Conventionally, pilot signals are required for the AP to achieve user activity detection and channel estimation before active user signal detection, which may still result in substantial overhead and latency. In this paper, to further reduce the overhead and latency, we explore the problem of grant-free random access without the use of pilot signals in a millimeter wave (mmWave) multiple input and multiple output (MIMO) system, where the AP performs blind joint user activity detection, channel estimation and signal detection (UACESD). We show that the blind joint UACESD can be formulated as a constrained composite matrix factorization problem, which can be solved by exploiting the structures of the channel matrix and signal matrix. Leveraging our recently developed unitary approximate message passing based matrix factorization (UAMP-MF) algorithm, we design a message passing based Bayesian algorithm to solve the blind joint UACESD problem. Extensive simulation results demonstrate the effectiveness of the blind grant-free random access scheme.
Structure-Enhanced DRL for Optimal Transmission Scheduling
Dec 24, 2022



Remote state estimation of large-scale distributed dynamic processes plays an important role in Industry 4.0 applications. In this paper, we focus on the transmission scheduling problem of a remote estimation system. First, we derive some structural properties of the optimal sensor scheduling policy over fading channels. Then, building on these theoretical guidelines, we develop a structure-enhanced deep reinforcement learning (DRL) framework for optimal scheduling of the system to achieve the minimum overall estimation mean-square error (MSE). In particular, we propose a structure-enhanced action selection method, which tends to select actions that obey the policy structure. This explores the action space more effectively and enhances the learning efficiency of DRL agents. Furthermore, we introduce a structure-enhanced loss function to add penalties to actions that do not follow the policy structure. The new loss function guides the DRL to converge to the optimal policy structure quickly. Our numerical experiments illustrate that the proposed structure-enhanced DRL algorithms can save the training time by 50% and reduce the remote estimation MSE by 10% to 25% when compared to benchmark DRL algorithms. In addition, we show that the derived structural properties exist in a wide range of dynamic scheduling problems that go beyond remote state estimation.
Structure-Enhanced Deep Reinforcement Learning for Optimal Transmission Scheduling
Nov 20, 2022Remote state estimation of large-scale distributed dynamic processes plays an important role in Industry 4.0 applications. In this paper, by leveraging the theoretical results of structural properties of optimal scheduling policies, we develop a structure-enhanced deep reinforcement learning (DRL) framework for optimal scheduling of a multi-sensor remote estimation system to achieve the minimum overall estimation mean-square error (MSE). In particular, we propose a structure-enhanced action selection method, which tends to select actions that obey the policy structure. This explores the action space more effectively and enhances the learning efficiency of DRL agents. Furthermore, we introduce a structure-enhanced loss function to add penalty to actions that do not follow the policy structure. The new loss function guides the DRL to converge to the optimal policy structure quickly. Our numerical results show that the proposed structure-enhanced DRL algorithms can save the training time by 50% and reduce the remote estimation MSE by 10% to 25%, when compared to benchmark DRL algorithms.
A Scalable Graph Neural Network Decoder for Short Block Codes
Nov 13, 2022



In this work, we propose a novel decoding algorithm for short block codes based on an edge-weighted graph neural network (EW-GNN). The EW-GNN decoder operates on the Tanner graph with an iterative message-passing structure, which algorithmically aligns with the conventional belief propagation (BP) decoding method. In each iteration, the "weight" on the message passed along each edge is obtained from a fully connected neural network that has the reliability information from nodes/edges as its input. Compared to existing deep-learning-based decoding schemes, the EW-GNN decoder is characterised by its scalability, meaning that 1) the number of trainable parameters is independent of the codeword length, and 2) an EW-GNN decoder trained with shorter/simple codes can be directly used for longer/sophisticated codes of different code rates. Furthermore, simulation results show that the EW-GNN decoder outperforms the BP and deep-learning-based BP methods from the literature in terms of the decoding error rate.
Signal Detection in MIMO Systems with Hardware Imperfections: Message Passing on Neural Networks
Oct 08, 2022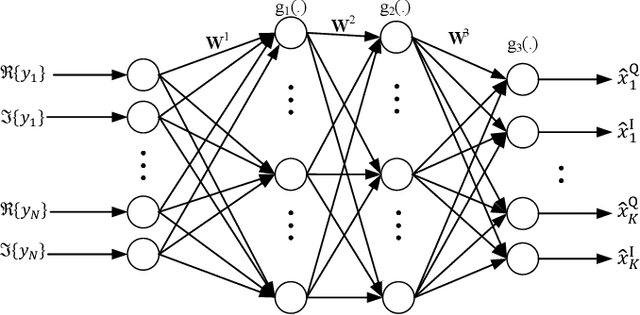
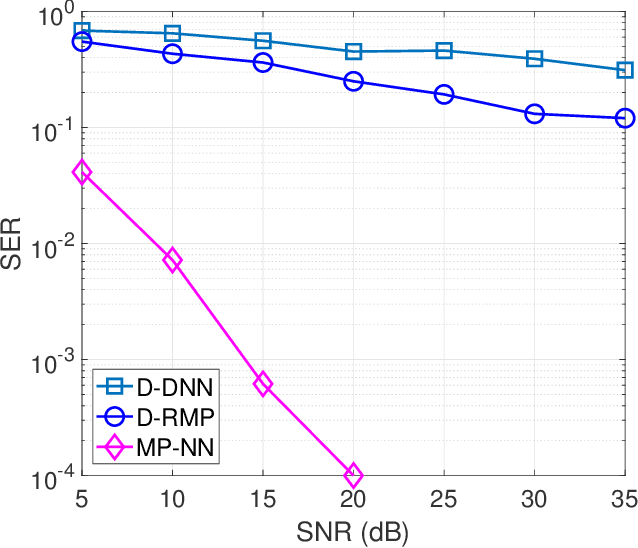
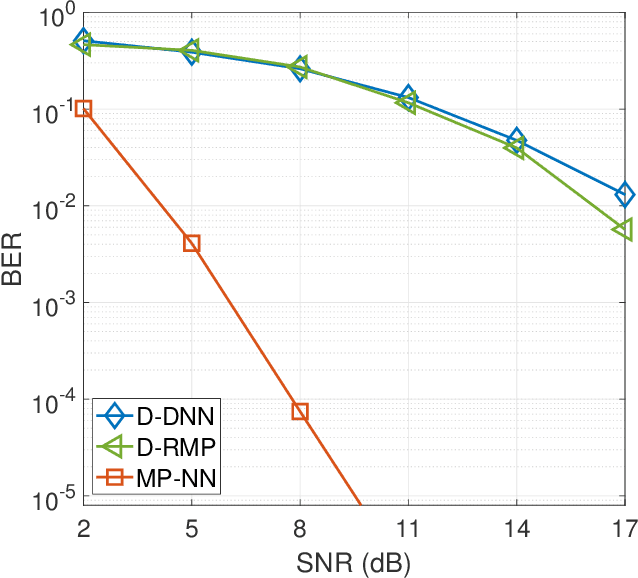
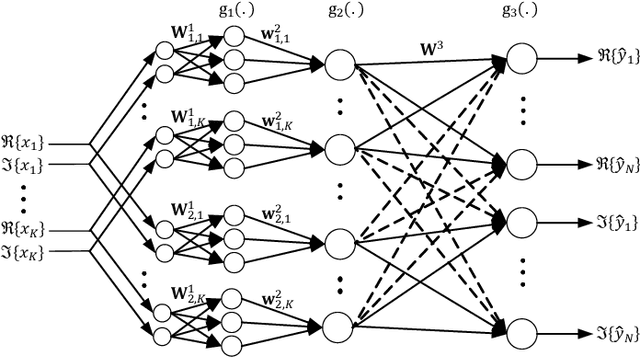
In this paper, we investigate signal detection in multiple-input-multiple-output (MIMO) communication systems with hardware impairments, such as power amplifier nonlinearity and in-phase/quadrature imbalance. To deal with the complex combined effects of hardware imperfections, neural network (NN) techniques, in particular deep neural networks (DNNs), have been studied to directly compensate for the impact of hardware impairments. However, it is difficult to train a DNN with limited pilot signals, hindering its practical applications. In this work, we investigate how to achieve efficient Bayesian signal detection in MIMO systems with hardware imperfections. Characterizing combined hardware imperfections often leads to complicated signal models, making Bayesian signal detection challenging. To address this issue, we first train an NN to "model" the MIMO system with hardware imperfections and then perform Bayesian inference based on the trained NN. Modelling the MIMO system with NN enables the design of NN architectures based on the signal flow of the MIMO system, minimizing the number of NN layers and parameters, which is crucial to achieving efficient training with limited pilot signals. We then represent the trained NN with a factor graph, and design an efficient message passing based Bayesian signal detector, leveraging the unitary approximate message passing (UAMP) algorithm. The implementation of a turbo receiver with the proposed Bayesian detector is also investigated. Extensive simulation results demonstrate that the proposed technique delivers remarkably better performance than state-of-the-art methods.
Deep Learning for Wireless Networked Systems: a joint Estimation-Control-Scheduling Approach
Oct 03, 2022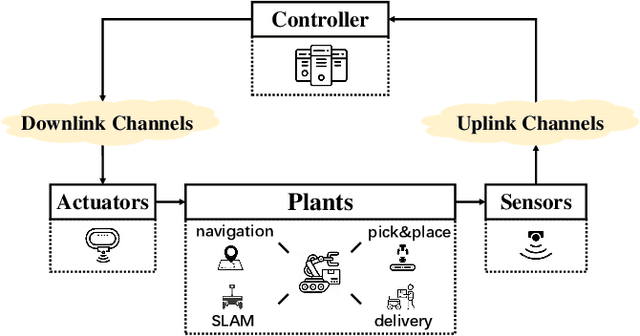
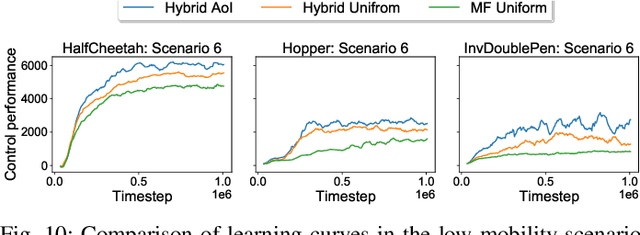
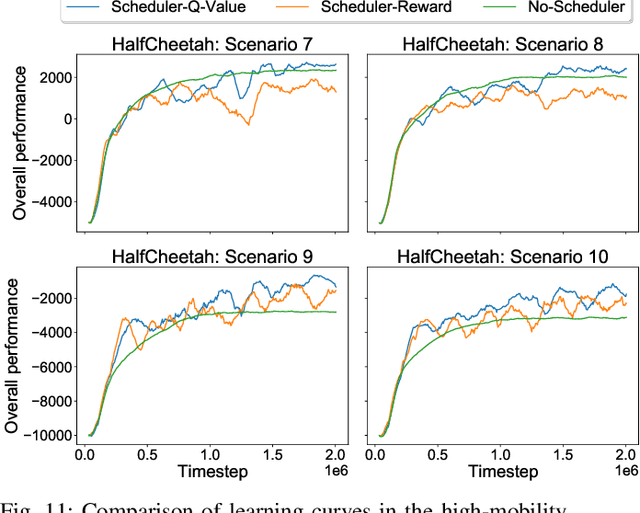
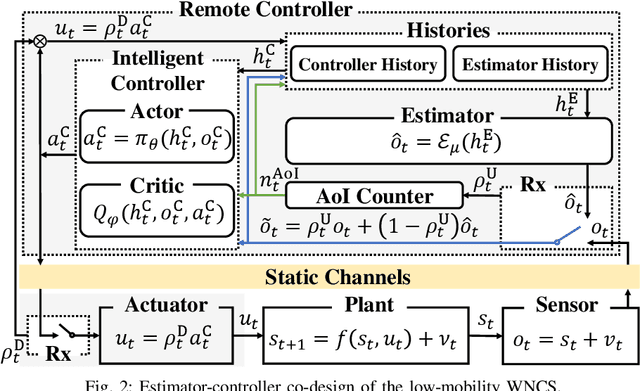
Wireless networked control system (WNCS) connecting sensors, controllers, and actuators via wireless communications is a key enabling technology for highly scalable and low-cost deployment of control systems in the Industry 4.0 era. Despite the tight interaction of control and communications in WNCSs, most existing works adopt separative design approaches. This is mainly because the co-design of control-communication policies requires large and hybrid state and action spaces, making the optimal problem mathematically intractable and difficult to be solved effectively by classic algorithms. In this paper, we systematically investigate deep learning (DL)-based estimator-control-scheduler co-design for a model-unknown nonlinear WNCS over wireless fading channels. In particular, we propose a co-design framework with the awareness of the sensor's age-of-information (AoI) states and dynamic channel states. We propose a novel deep reinforcement learning (DRL)-based algorithm for controller and scheduler optimization utilizing both model-free and model-based data. An AoI-based importance sampling algorithm that takes into account the data accuracy is proposed for enhancing learning efficiency. We also develop novel schemes for enhancing the stability of joint training. Extensive experiments demonstrate that the proposed joint training algorithm can effectively solve the estimation-control-scheduling co-design problem in various scenarios and provide significant performance gain compared to separative design and some benchmark policies.
Unitary Approximate Message Passing for Matrix Factorization
Jul 31, 2022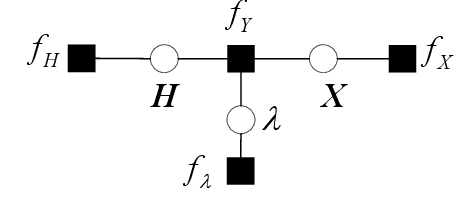
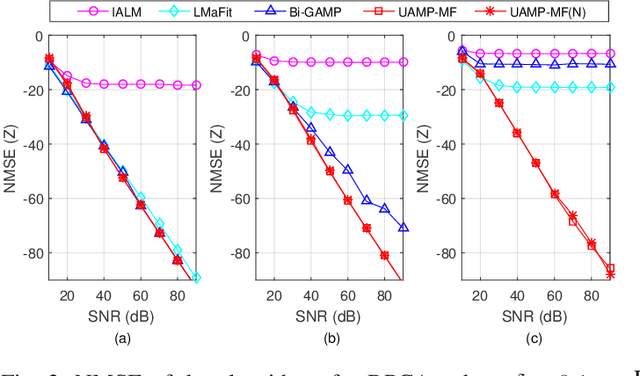
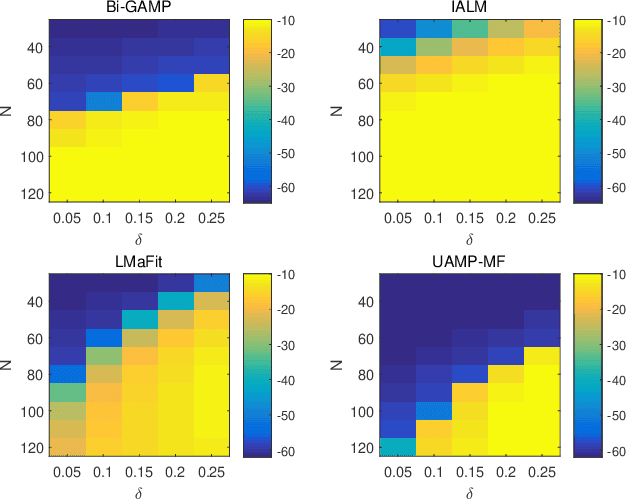
We consider matrix factorization (MF) with certain constraints, which finds wide applications in various areas. Leveraging variational inference (VI) and unitary approximate message passing (UAMP), we develop a Bayesian approach to MF with an efficient message passing implementation, called UAMPMF. With proper priors imposed on the factor matrices, UAMPMF can be used to solve many problems that can be formulated as MF, such as non negative matrix factorization, dictionary learning, compressive sensing with matrix uncertainty, robust principal component analysis, and sparse matrix factorization. Extensive numerical examples are provided to show that UAMPMF significantly outperforms state-of-the-art algorithms in terms of recovery accuracy, robustness and computational complexity.
Reconfigurable Intelligent Surface-aided $M$-ary FM-DCSK System: a New Design for Noncoherent Chaos-based Communication
Jun 16, 2022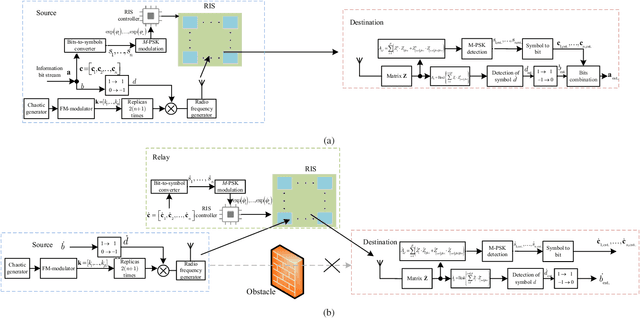
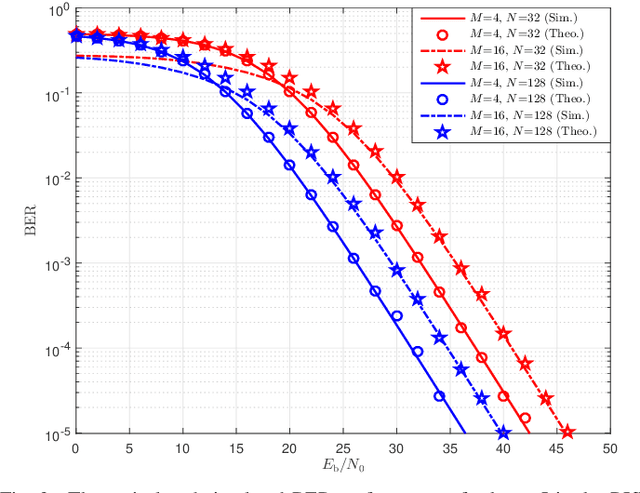
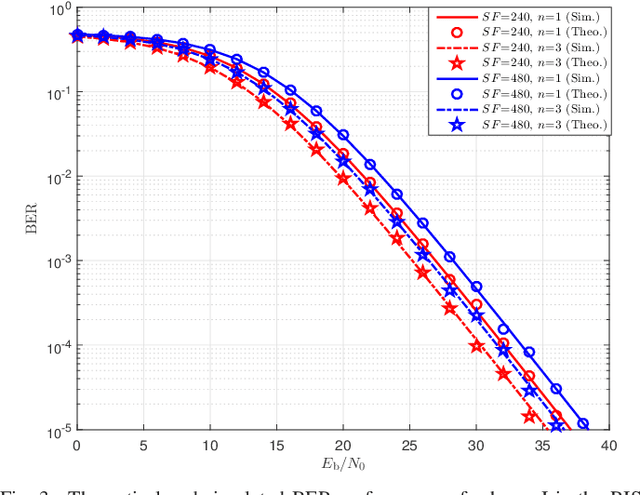
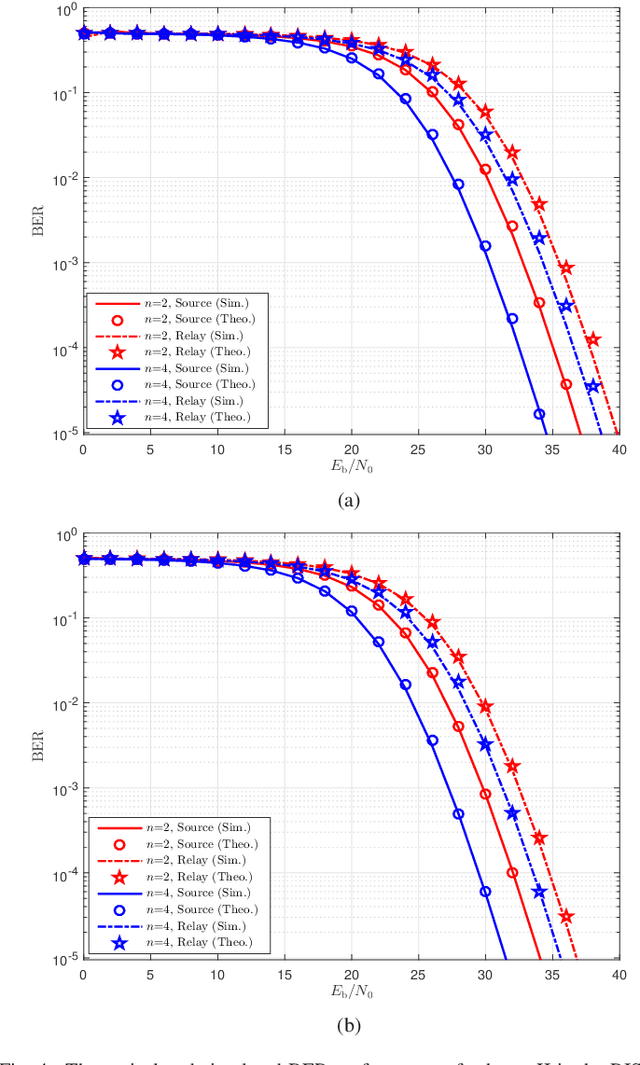
In this paper, we propose two reconfigurable intelligent surface-aided $M$-ary frequency-modulated differential chaos shift keying (RIS-$M$-FM-DCSK) schemes. In scheme I, the RIS is regarded as a transmitter at the source to incorporate the $M$-ary phase-shift-keying ($M$-PSK) symbols into the FM chaotic signal and to reflect the resultant $M$-ary FM chaotic signal toward the destination. The information bits of the source are carried by both the positive/negative state of the FM chaotic signal and the $M$-PSK symbols. In scheme II, the RIS is treated as a relay so that both the source and relay can simultaneously transmit their information bits to the destination. The information bits of the source and relay are carried by the positive/negative state of the FM chaotic signal and $M$-PSK symbols generated by the RIS, respectively. The proposed RIS-$M$-FM-DCSK system has an attractive advantage that it does not require channel state information for detection, thus avoiding complex channel estimation. Moreover, we derive the theoretical expressions for bit error rates (BERs) of the proposed RIS-$M$-FM-DCSK system with both scheme I and scheme II over multipath Rayleigh fading channels. Simulations results not only verify the accuracy of the theoretical derivations, but also demonstrate the superiority of the proposed system. The proposed RIS-$M$-FM-DCSK system is a promising low-cost, low-power, and high-reliability alternative for wireless communication networks.
DRL-based Resource Allocation in Remote State Estimation
May 24, 2022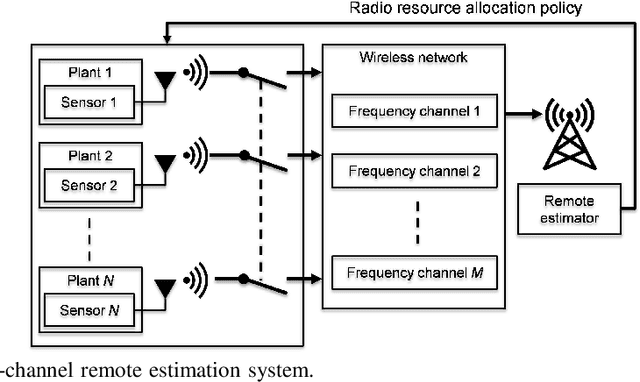
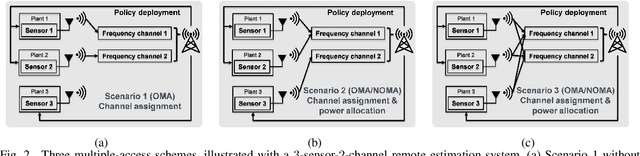
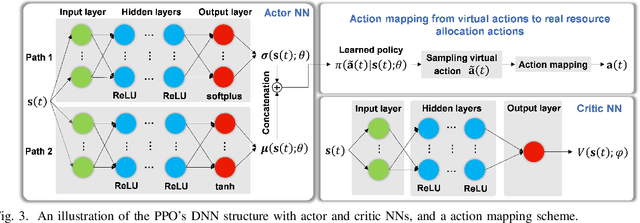
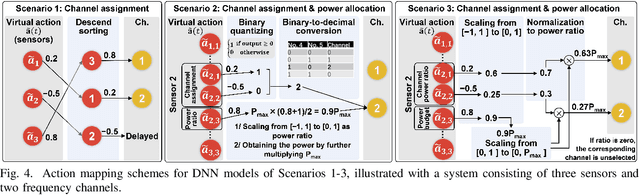
Remote state estimation, where sensors send their measurements of distributed dynamic plants to a remote estimator over shared wireless resources, is essential for mission-critical applications of Industry 4.0. Existing algorithms on dynamic radio resource allocation for remote estimation systems assumed oversimplified wireless communications models and can only work for small-scale settings. In this work, we consider remote estimation systems with practical wireless models over the orthogonal multiple-access and non-orthogonal multiple-access schemes. We derive necessary and sufficient conditions under which remote estimation systems can be stabilized. The conditions are described in terms of the transmission power budget, channel statistics, and plants' parameters. For each multiple-access scheme, we formulate a novel dynamic resource allocation problem as a decision-making problem for achieving the minimum overall long-term average estimation mean-square error. Both the estimation quality and the channel quality states are taken into account for decision making. We systematically investigated the problems under different multiple-access schemes with large discrete, hybrid discrete-and-continuous, and continuous action spaces, respectively. We propose novel action-space compression methods and develop advanced deep reinforcement learning algorithms to solve the problems. Numerical results show that our algorithms solve the resource allocation problems effectively and provide much better scalability than the literature.