 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonte Carlo Filtering Objectives: A New Family of Variational Objectives to Learn Generative Model and Neural Adaptive Proposal for Time Series
May 20, 2021
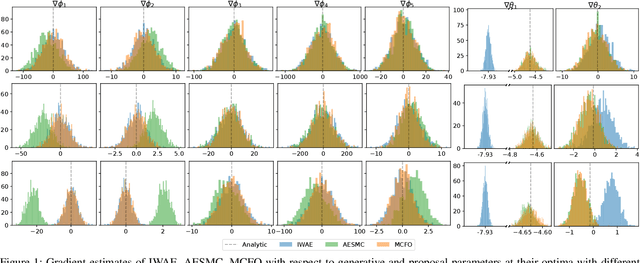
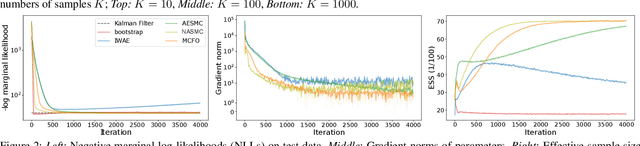
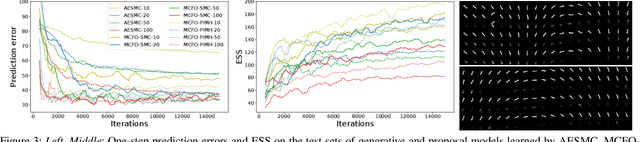
Learning generative models and inferring latent trajectories have shown to be challenging for time series due to the intractable marginal likelihoods of flexible generative models. It can be addressed by surrogate objectives for optimization. We propose Monte Carlo filtering objectives (MCFOs), a family of variational objectives for jointly learning parametric generative models and amortized adaptive importance proposals of time series. MCFOs extend the choices of likelihood estimators beyond Sequential Monte Carlo in state-of-the-art objectives, possess important properties revealing the factors for the tightness of objectives, and allow for less biased and variant gradient estimates. We demonstrate that the proposed MCFOs and gradient estimations lead to efficient and stable model learning, and learned generative models well explain data and importance proposals are more sample efficient on various kinds of time series data.
Human-robot collaborative object transfer using human motion prediction based on Cartesian pose Dynamic Movement Primitives
Apr 07, 2021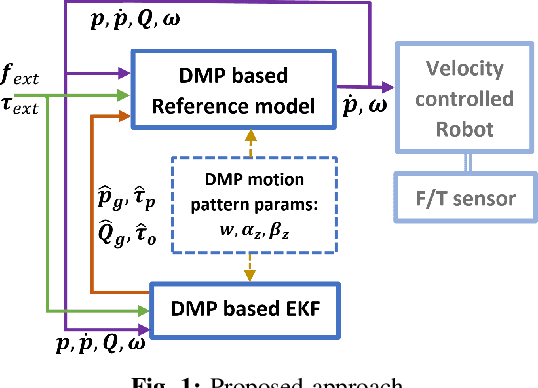
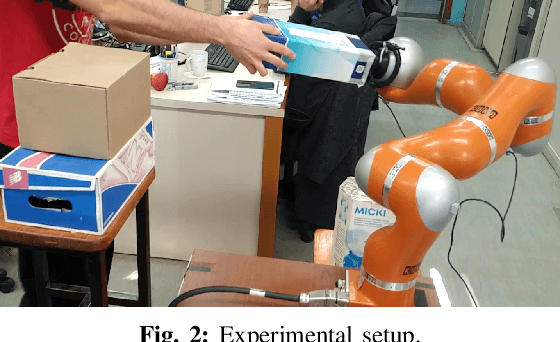
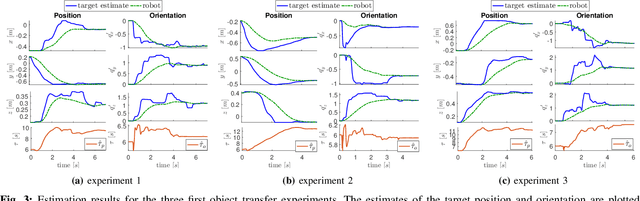
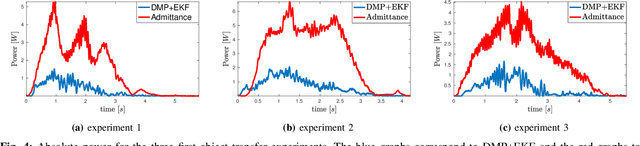
In this work, the problem of human-robot collaborative object transfer to unknown target poses is addressed. The desired pattern of the end-effector pose trajectory to a known target pose is encoded using DMPs (Dynamic Movement Primitives). During transportation of the object to new unknown targets, a DMP-based reference model and an EKF (Extended Kalman Filter) for estimating the target pose and time duration of the human's intended motion is proposed. A stability analysis of the overall scheme is provided. Experiments using a Kuka LWR4+ robot equipped with an ATI sensor at its end-effector validate its efficacy with respect to the required human effort and compare it with an admittance control scheme.
Interpretability in Contact-Rich Manipulation via Kinodynamic Images
Feb 23, 2021



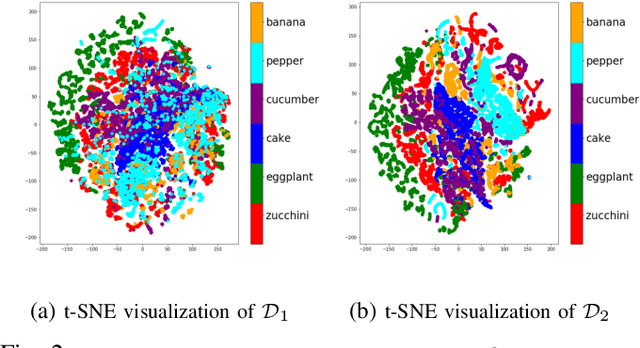
Deep Neural Networks (NNs) have been widely utilized in contact-rich manipulation tasks to model the complicated contact dynamics. However, NN-based models are often difficult to decipher which can lead to seemingly inexplicable behaviors and unidentifiable failure cases. In this work, we address the interpretability of NN-based models by introducing the kinodynamic images. We propose a methodology that creates images from the kinematic and dynamic data of a contact-rich manipulation task. Our formulation visually reflects the task's state by encoding its kinodynamic variations and temporal evolution. By using images as the state representation, we enable the application of interpretability modules that were previously limited to vision-based tasks. We use this representation to train Convolution-based Networks and we extract interpretations of the model's decisions with Grad-CAM, a technique that produces visual explanations. Our method is versatile and can be applied to any classification problem using synchronous features in manipulation to visually interpret which parts of the input drive the model's decisions and distinguish its failure modes. We evaluate this approach on two examples of real-world contact-rich manipulation: pushing and cutting, with known and unknown objects. Finally, we demonstrate that our method enables both detailed visual inspections of sequences in a task, as well as high-level evaluations of a model's behavior and tendencies. Data and code for this work are available at https://github.com/imitsioni/interpretable_manipulation.
Modelling and Learning Dynamics for Robotic Food-Cutting
Mar 20, 2020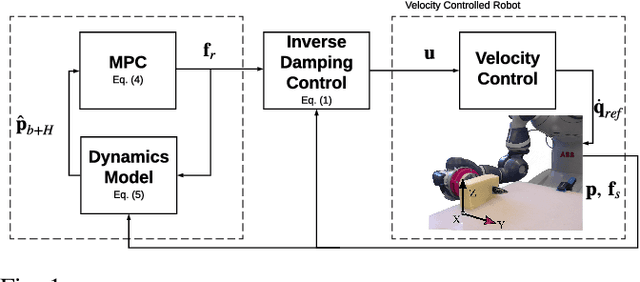
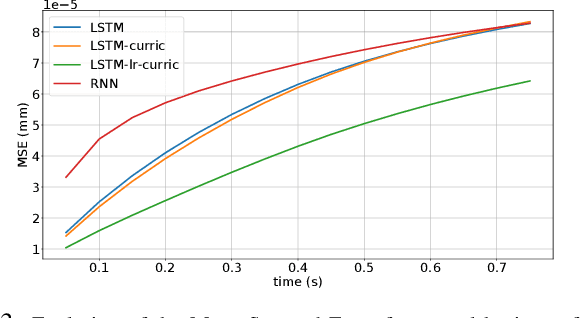
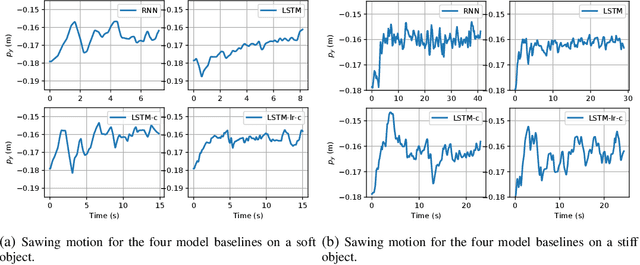
Data-driven approaches for modelling contact-rich tasks address many of the difficulties that analytical models bear. For real-world scenarios, the hardware capabilities constrain the available measurements and consequently, every step of the problem's formulation. In this work, we propose a formulation that encapsulates knowledge from a baseline controller for the contact-rich task of food-cutting. Based on this formulation, we employ deep networks to model the dynamics within a model predictive controller. We design a training process based on curriculum training with learning rate decay for multi-step predictions, which are essential for receding horizon control. Experimental results demonstrate that even with a simple architecture, our model achieves consistently good predictive performance on known and unknown object classes and exhibits a good understanding of the long term dynamics.
Asymmetric Dual-Arm Task Execution using an Extended Relative Jacobian
May 17, 2019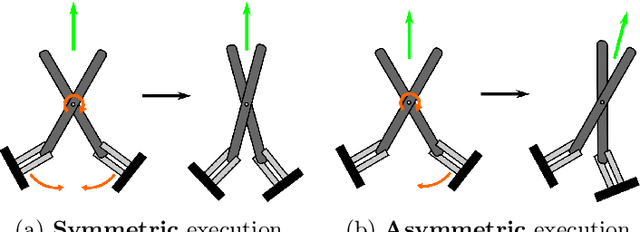


Coordinated dual-arm manipulation tasks can be broadly characterized as possessing absolute and relative motion components. Relative motion tasks, in particular, are inherently redundant in the way they can be distributed between end-effectors. In this work, we analyse cooperative manipulation in terms of the asymmetric resolution of relative motion tasks. We discuss how existing approaches enable the asymmetric execution of a relative motion task, and show how an asymmetric relative motion space can be defined. We leverage this result to propose an extended relative Jacobian to model the cooperative system, which allows a user to set a concrete degree of asymmetry in the task execution. This is achieved without the need for prescribing an absolute motion target. Instead, the absolute motion remains available as a functional redundancy to the system. We illustrate the properties of our proposed Jacobian through numerical simulations of a novel differential Inverse~Kinematics algorithm.
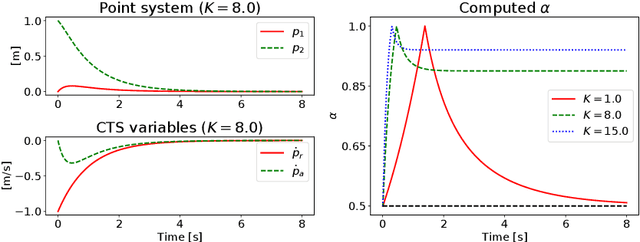
A Lyapunov-Based Approach to Exploit Asymmetries in Robotic Dual-Arm Task Resolution
May 03, 2019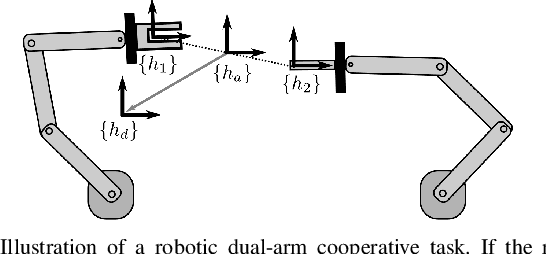
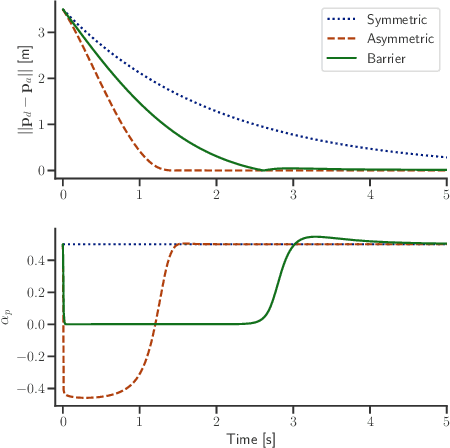
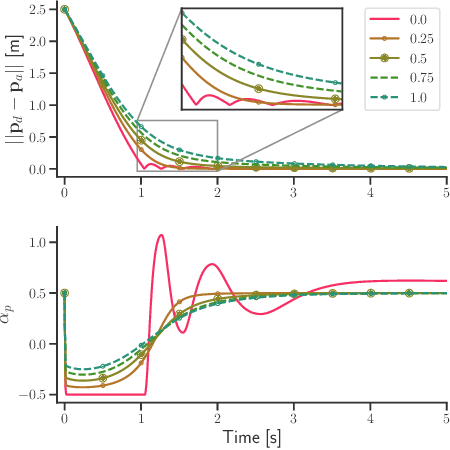
Dual-arm manipulation tasks can be prescribed to a robotic system in terms of desired absolute and relative motion of the robot's end-effectors. These can represent, e.g., jointly carrying a rigid object or performing an assembly task. When both types of motion are to be executed concurrently, the symmetric distribution of the relative motion between arms prevents task conflicts. Conversely, an asymmetric solution to the relative motion task will result in conflicts with the absolute task. In this work, we address the problem of designing a control law for the absolute motion task together with updating the distribution of the relative task among arms. Through a set of numerical results, we contrast our approach with the classical symmetric distribution of the relative motion task to illustrate the advantages of our method.
Data-Driven Model Predictive Control for Food-Cutting
Mar 09, 2019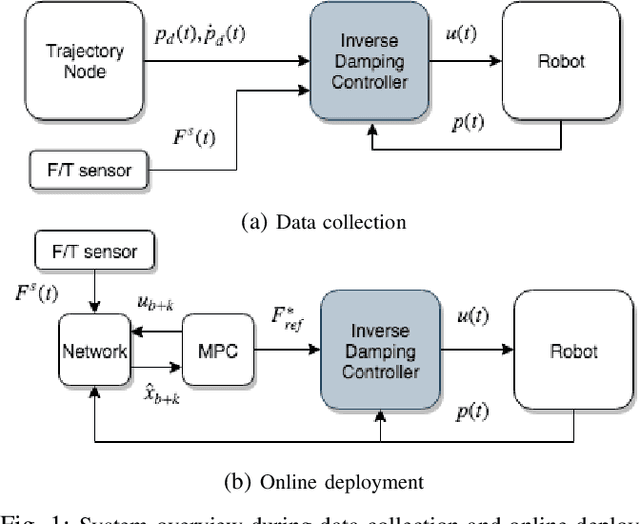
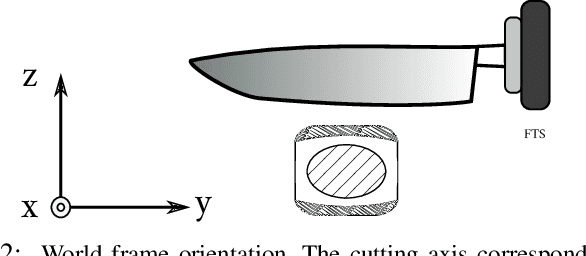

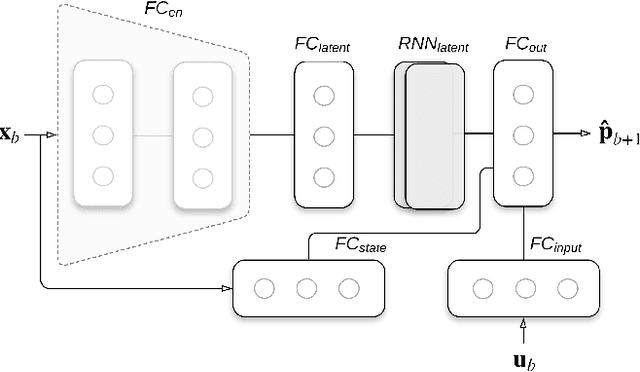
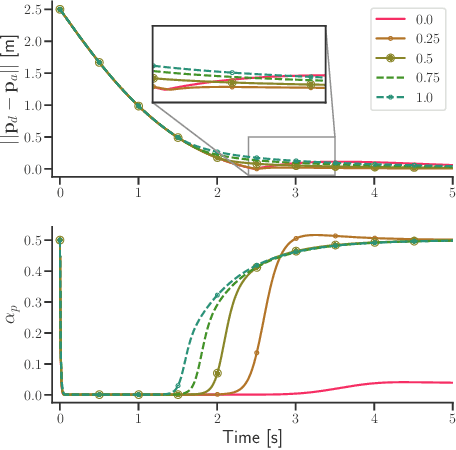
Modelling of contact-rich tasks is challenging and cannot be entirely solved using classical control approaches due to the difficulty of constructing an analytic description of the contact dynamics. Additionally, in a manipulation task like food-cutting, purely learning-based methods such as Reinforcement Learning, require either a vast amount of data that is expensive to collect on a real robot, or a highly realistic simulation environment, which is currently not available. This paper presents a data-driven control approach that employs a recurrent neural network to model the dynamics for a Model Predictive Controller. We extend on previous work that was limited to torque-controlled robots by incorporating Force/Torque sensor measurements and formulate the control problem so that it can be applied to the more common velocity controlled robots. We evaluate the performance on objects used for training, as well as on unknown objects, by means of the cutting rates achieved and demonstrate that the method can efficiently treat different cases with only one dynamic model. Finally we investigate the behavior of the system during force-critical instances of cutting and illustrate its adaptive behavior in difficult cases.
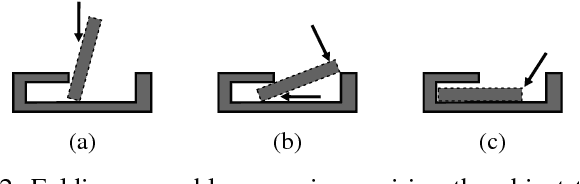
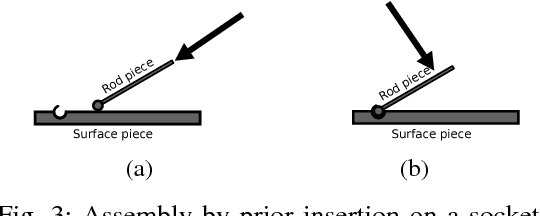
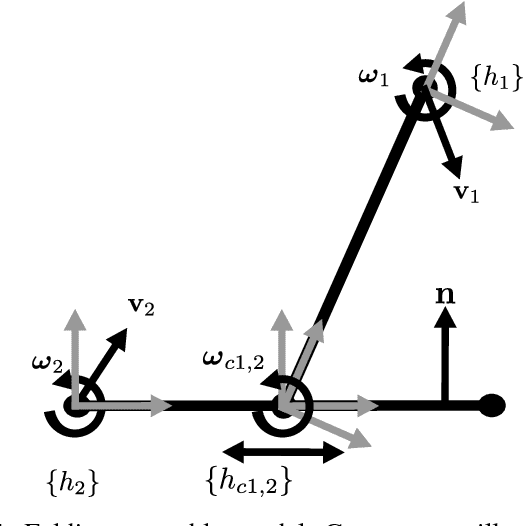
Folding Assembly by Means of Dual-Arm Robotic Manipulation
Apr 22, 2016
In this paper, we consider folding assembly as an assembly primitive suitable for dual-arm robotic assembly, that can be integrated in a higher level assembly strategy. The system composed by two pieces in contact is modelled as an articulated object, connected by a prismatic-revolute joint. Different grasping scenarios were considered in order to model the system, and a simple controller based on feedback linearisation is proposed, using force torque measurements to compute the contact point kinematics. The folding assembly controller has been experimentally tested with two sample parts, in order to showcase folding assembly as a viable assembly primitive.