 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Vision-based Vehicle Localization Aided by Fine-grained Classification
Apr 21, 2018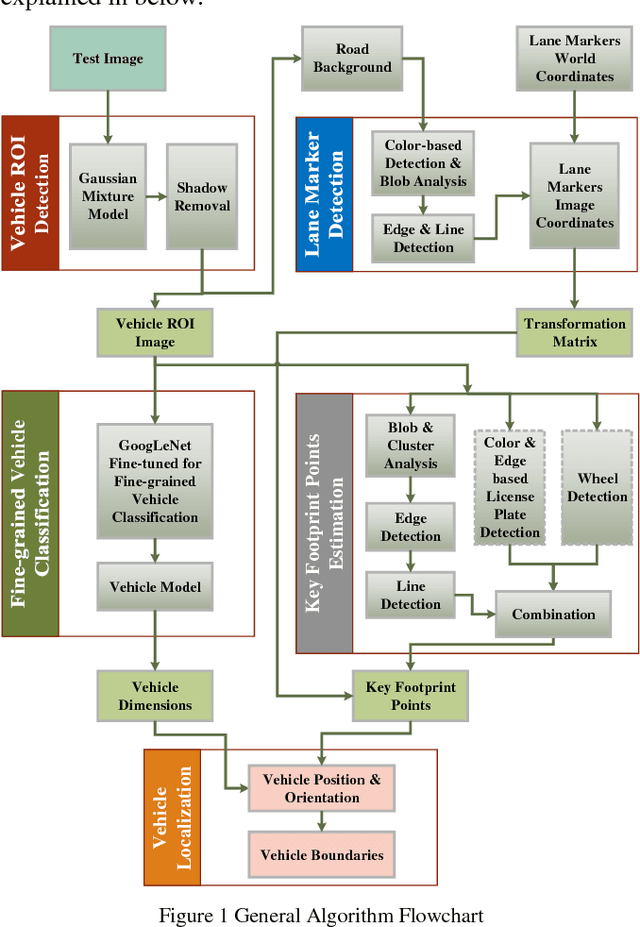
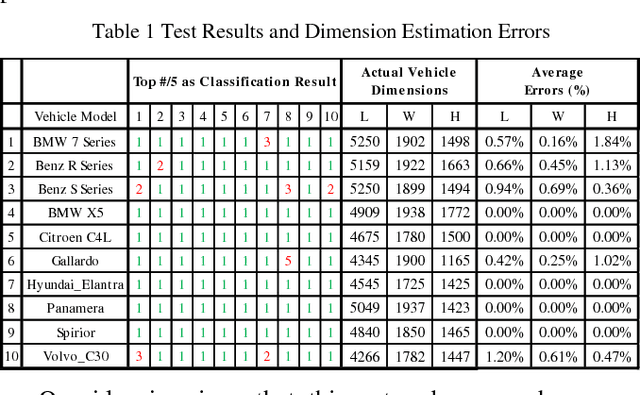
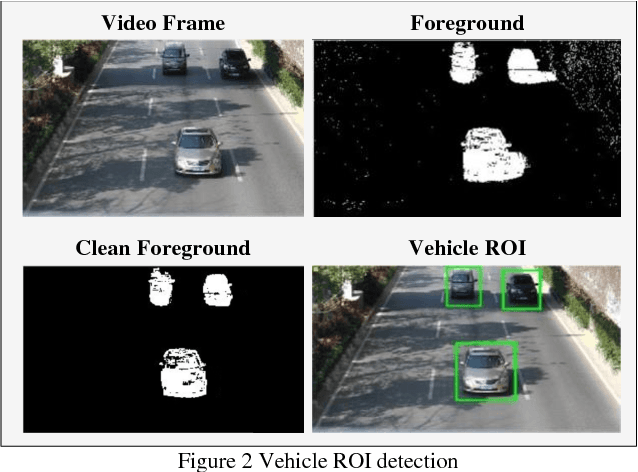
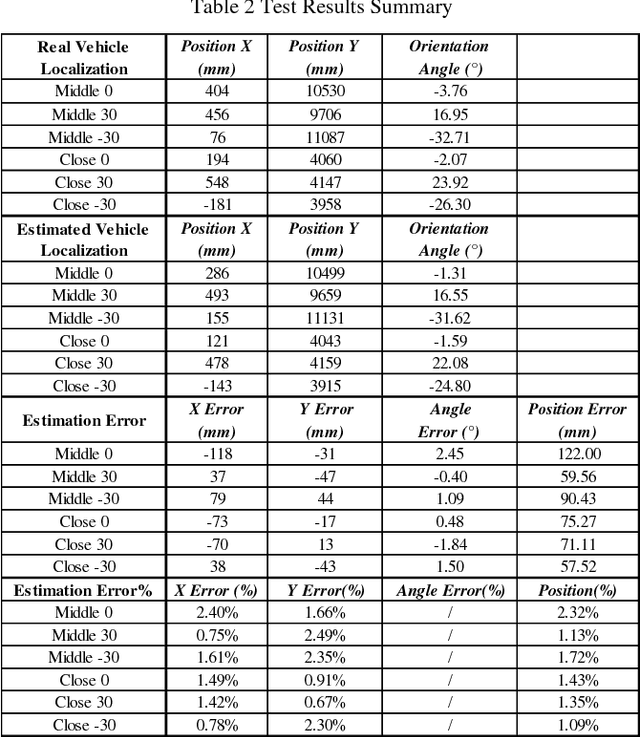
Monocular camera systems are prevailing in intelligent transportation systems, but by far they have rarely been used for dimensional purposes such as to accurately estimate the localization information of a vehicle. In this paper, we show that this capability can be realized. By integrating a series of advanced computer vision techniques including foreground extraction, edge and line detection, etc., and by utilizing deep learning networks for fine-grained vehicle model classification, we developed an algorithm which can estimate vehicles location (position, orientation and boundaries) within the environment down to 3.79 percent position accuracy and 2.5 degrees orientation accuracy. With this enhancement, current massive surveillance camera systems can potentially play the role of e-traffic police and trigger many new intelligent transportation applications, for example, to guide vehicles for parking or even for autonomous driving.
Dynamic Balance Control of Multi-arm Free-Floating Space Robots
Jan 14, 2006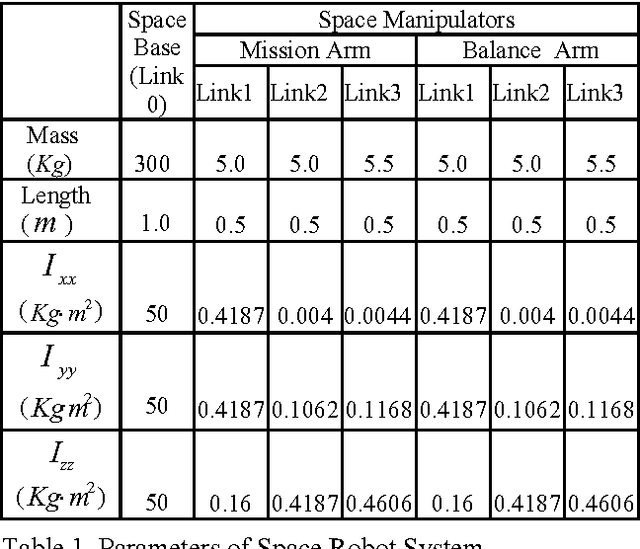
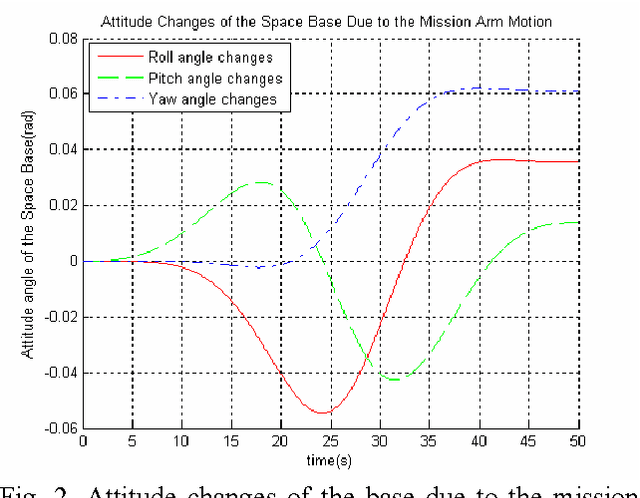
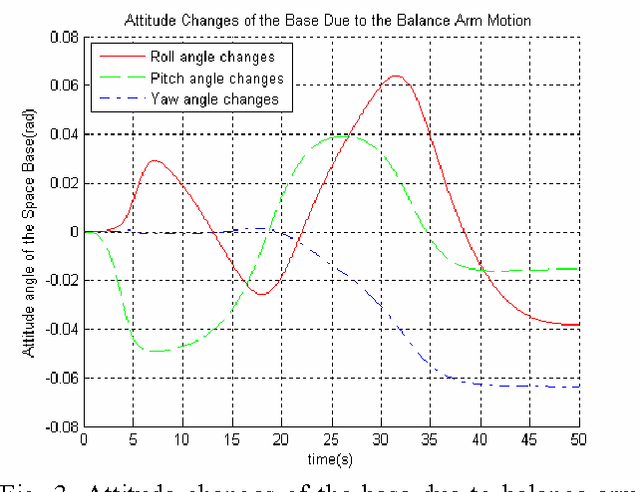
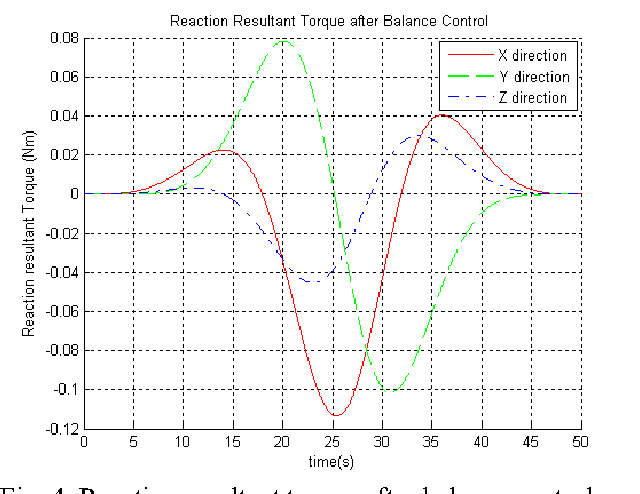
This paper investigates the problem of the dynamic balance control of multi-arm free-floating space robot during capturing an active object in close proximity. The position and orientation of space base will be affected during the operation of space manipulator because of the dynamics coupling between the manipulator and space base. This dynamics coupling is unique characteristics of space robot system. Such a disturbance will produce a serious impact between the manipulator hand and the object. To ensure reliable and precise operation, we propose to develop a space robot system consisting of two arms, with one arm (mission arm) for accomplishing the capture mission, and the other one (balance arm) compensating for the disturbance of the base. We present the coordinated control concept for balance of the attitude of the base using the balance arm. The mission arm can move along the given trajectory to approach and capture the target with no considering the disturbance from the coupling of the base. We establish a relationship between the motion of two arm that can realize the zeros reaction to the base. The simulation studies verified the validity and efficiency of the proposed control method.
Gyroscopically Stabilized Robot: Balance and Tracking
Dec 11, 2004
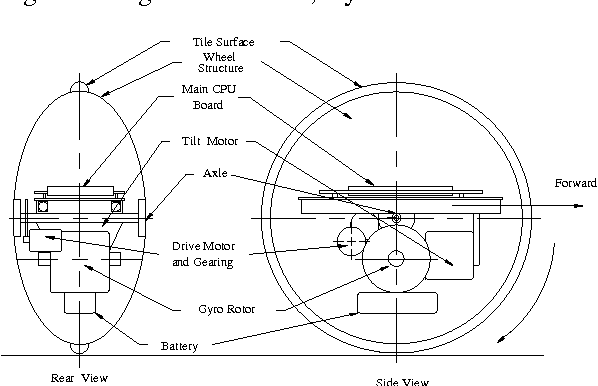
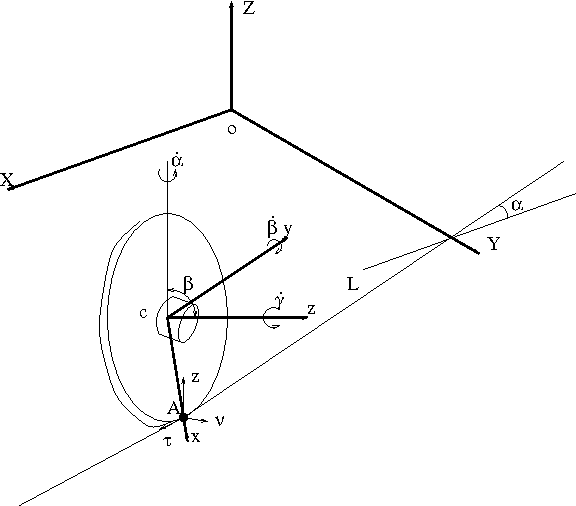
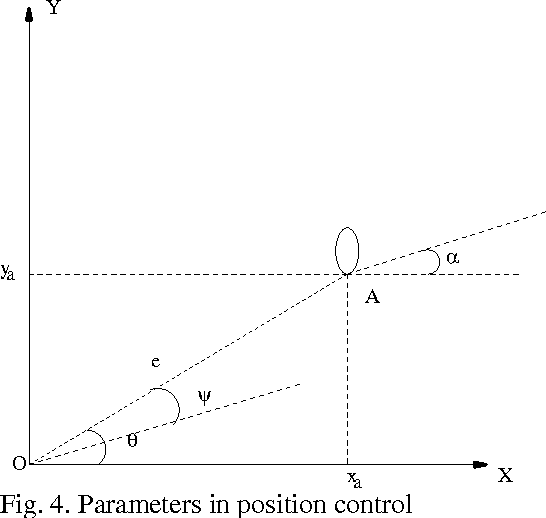
The single wheel, gyroscopically stabilized robot - Gyrover, is a dynamically stable but statically unstable, underactuated system. In this paper, based on the dynamic model of the robot, we investigate two classes of nonholonomic constraints associated with the system. Then, based on the backstepping technology, we propose a control law for balance control of Gyrover. Next, through transferring the systems states from Cartesian coordinate to polar coordinate, control laws for point-to-point control and line tracking in Cartesian space are provided.