 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRC-Coder: Automated DRC Checker Code Generation Using LLM Autonomous Agent
Nov 28, 2024



In the advanced technology nodes, the integrated design rule checker (DRC) is often utilized in place and route tools for fast optimization loops for power-performance-area. Implementing integrated DRC checkers to meet the standard of commercial DRC tools demands extensive human expertise to interpret foundry specifications, analyze layouts, and debug code iteratively. However, this labor-intensive process, requiring to be repeated by every update of technology nodes, prolongs the turnaround time of designing circuits. In this paper, we present DRC-Coder, a multi-agent framework with vision capabilities for automated DRC code generation. By incorporating vision language models and large language models (LLM), DRC-Coder can effectively process textual, visual, and layout information to perform rule interpretation and coding by two specialized LLMs. We also design an auto-evaluation function for LLMs to enable DRC code debugging. Experimental results show that targeting on a sub-3nm technology node for a state-of-the-art standard cell layout tool, DRC-Coder achieves perfect F1 score 1.000 in generating DRC codes for meeting the standard of a commercial DRC tool, highly outperforming standard prompting techniques (F1=0.631). DRC-Coder can generate code for each design rule within four minutes on average, which significantly accelerates technology advancement and reduces engineering costs.
Flow-Based Generative Emulation of Grids of Stellar Evolutionary Models
Jul 12, 2024We present a flow-based generative approach to emulate grids of stellar evolutionary models. By interpreting the input parameters and output properties of these models as multi-dimensional probability distributions, we train conditional normalizing flows to learn and predict the complex relationships between grid inputs and outputs in the form of conditional joint distributions. Leveraging the expressive power and versatility of these flows, we showcase their ability to emulate a variety of evolutionary tracks and isochrones across a continuous range of input parameters. In addition, we describe a simple Bayesian approach for estimating stellar parameters using these flows and demonstrate its application to asteroseismic datasets of red giants observed by the Kepler mission. By applying this approach to red giants in open clusters NGC 6791 and NGC 6819, we illustrate how large age uncertainties can arise when fitting only to global asteroseismic and spectroscopic parameters without prior information on initial helium abundances and mixing length parameter values. We also conduct inference using the flow at a large scale by determining revised estimates of masses and radii for 15,388 field red giants. These estimates show improved agreement with results from existing grid-based modelling, reveal distinct population-level features in the red clump, and suggest that the masses of Kepler red giants previously determined using the corrected asteroseismic scaling relations have been overestimated by 5-10%.
In Tree Structure Should Sentence Be Generated
Jun 20, 2024Generative models reliant on sequential autoregression have been at the forefront of language generation for an extensive period, particularly following the introduction of widely acclaimed transformers. Despite its excellent performance, there are always some issues that we face today. For example, problems such as hallucinations and getting trapped in a logic loop may occur. To enhance the performance of existing systems, this paper introduces a new method for generating sequences in natural language, which involves generating the targeted sentence in a tree-traversing order. The paper includes an illustration of the theoretical basis and validity of the approach, as well as a comparison of its fundamentals with the diffusion model in graphic generation. Finally, a module called SenTree is introduced for generating an approximating binary tree. It is already available at https://github.com/arklyg/sentree. Additionally, a joint training framework based on this approach is proposed, incorporating the intrinsics of generative adversarial networks.
DETECT: Deep Trajectory Clustering for Mobility-Behavior Analysis
Mar 03, 2020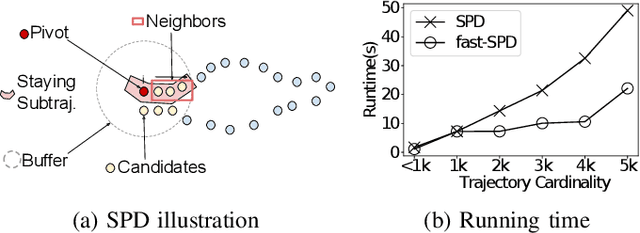
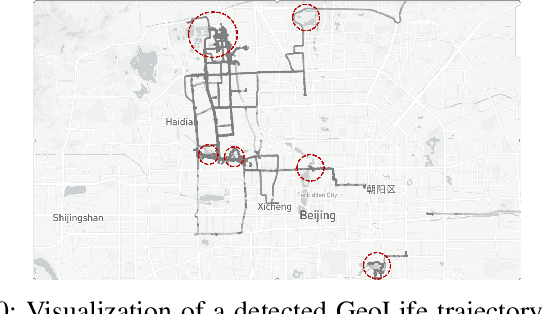
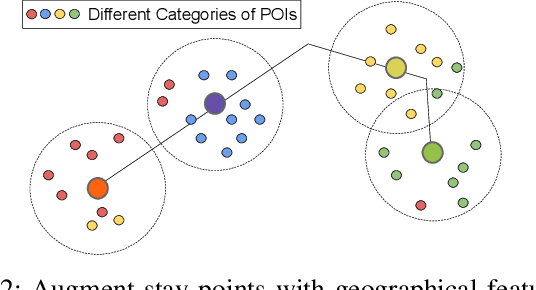
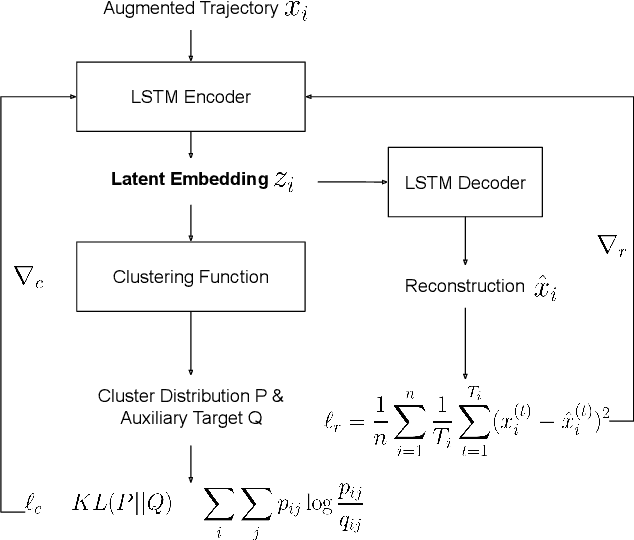
Identifying mobility behaviors in rich trajectory data is of great economic and social interest to various applications including urban planning, marketing and intelligence. Existing work on trajectory clustering often relies on similarity measurements that utilize raw spatial and/or temporal information of trajectories. These measures are incapable of identifying similar moving behaviors that exhibit varying spatio-temporal scales of movement. In addition, the expense of labeling massive trajectory data is a barrier to supervised learning models. To address these challenges, we propose an unsupervised neural approach for mobility behavior clustering, called the Deep Embedded TrajEctory ClusTering network (DETECT). DETECT operates in three parts: first it transforms the trajectories by summarizing their critical parts and augmenting them with context derived from their geographical locality (e.g., using POIs from gazetteers). In the second part, it learns a powerful representation of trajectories in the latent space of behaviors, thus enabling a clustering function (such as $k$-means) to be applied. Finally, a clustering oriented loss is directly built on the embedded features to jointly perform feature refinement and cluster assignment, thus improving separability between mobility behaviors. Exhaustive quantitative and qualitative experiments on two real-world datasets demonstrate the effectiveness of our approach for mobility behavior analyses.
Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting
Feb 22, 2018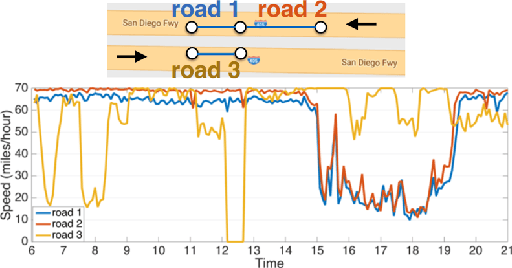
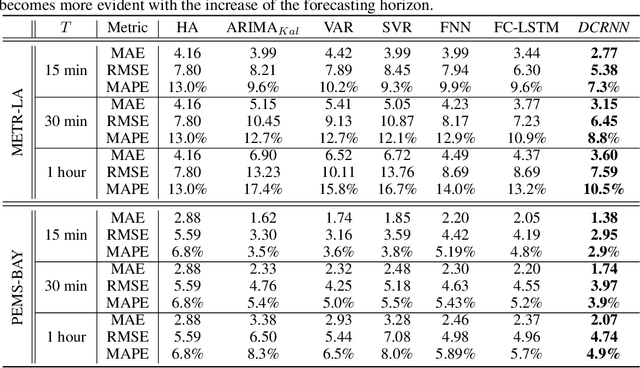
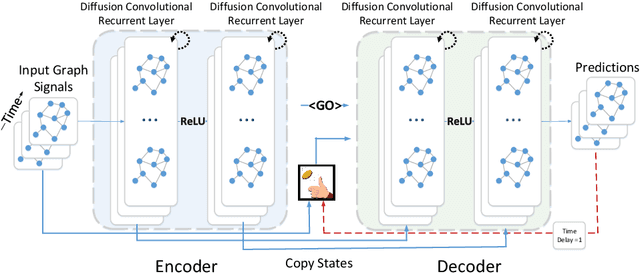
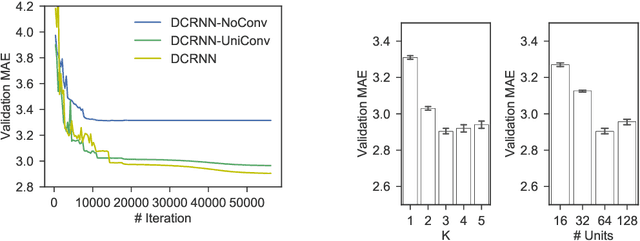
Spatiotemporal forecasting has various applications in neuroscience, climate and transportation domain. Traffic forecasting is one canonical example of such learning task. The task is challenging due to (1) complex spatial dependency on road networks, (2) non-linear temporal dynamics with changing road conditions and (3) inherent difficulty of long-term forecasting. To address these challenges, we propose to model the traffic flow as a diffusion process on a directed graph and introduce Diffusion Convolutional Recurrent Neural Network (DCRNN), a deep learning framework for traffic forecasting that incorporates both spatial and temporal dependency in the traffic flow. Specifically, DCRNN captures the spatial dependency using bidirectional random walks on the graph, and the temporal dependency using the encoder-decoder architecture with scheduled sampling. We evaluate the framework on two real-world large scale road network traffic datasets and observe consistent improvement of 12% - 15% over state-of-the-art baselines.