 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDelving into Non-Exchangeability for Conformal Prediction in Graph-Structured Multivariate Time Series
May 06, 2026Point forecasting for graph-structured multivariate time series is a fundamental problem, but rigorous uncertainty quantification for such predictions is still underexplored. Conformal prediction (CP) offers uncertainty estimation with a solid coverage guarantee under the exchangeability assumption, which requires the joint data distribution to be unchanged under permutation. However, in graph-structured time series, inherent cross-node coupling can violate the exchangeability condition, making direct application of CP unreliable. Inspired by the spectral graph theory, such coupling resides in global trends and can be characterized by the low-frequency components, while high-frequency components are nearly exchangeable. Therefore, we propose a novel concept named Spectral Graph Conditional Exchangeability (SGCE), which conditions exchangeable high-frequency components on low-frequency ones to preserve global trends and enable effective CP in the spectral domain. Based on SGCE, we further propose Spectral Conformal prediction via wAveLEt transform (SCALE). SCALE uses graph wavelets to decompose low/high-frequency components and conformalizes high-frequency residuals via adaptive gating over a low-frequency embedding. Experimental results on real-world traffic datasets show that SCALE not only achieves valid coverage but also consistently improves the coverage-efficiency trade-off over the state-of-the-art CP methods.
Conquering Ghosts: Relation Learning for Information Reliability Representation and End-to-End Robust Navigation
Mar 14, 2022
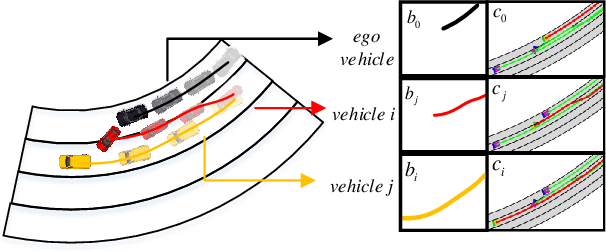
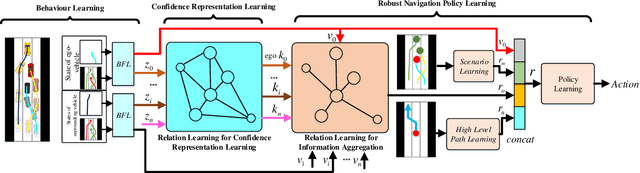

Environmental disturbances, such as sensor data noises, various lighting conditions, challenging weathers and external adversarial perturbations, are inevitable in real self-driving applications. Existing researches and testings have shown that they can severely influence the vehicles perception ability and performance, one of the main issue is the false positive detection, i.e., the ghost object which is not real existed or occurs in the wrong position (such as a non-existent vehicle). Traditional navigation methods tend to avoid every detected objects for safety, however, avoiding a ghost object may lead the vehicle into a even more dangerous situation, such as a sudden break on the highway. Considering the various disturbance types, it is difficult to address this issue at the perceptual aspect. A potential solution is to detect the ghost through relation learning among the whole scenario and develop an integrated end-to-end navigation system. Our underlying logic is that the behavior of all vehicles in the scene is influenced by their neighbors, and normal vehicles behave in a logical way, while ghost vehicles do not. By learning the spatio-temporal relation among surrounding vehicles, an information reliability representation is learned for each detected vehicle and then a robot navigation network is developed. In contrast to existing works, we encourage the network to learn how to represent the reliability and how to aggregate all the information with uncertainties by itself, thus increasing the efficiency and generalizability. To the best of the authors knowledge, this paper provides the first work on using graph relation learning to achieve end-to-end robust navigation in the presence of ghost vehicles. Simulation results in the CARLA platform demonstrate the feasibility and effectiveness of the proposed method in various scenarios.