 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRESBev: Making BEV Perception More Robust
Mar 10, 2026Bird's-eye-view (BEV) perception has emerged as a cornerstone of autonomous driving systems, providing a structured, ego-centric representation critical for downstream planning and control. However, real-world deployment faces challenges from sensor degradation and adversarial attacks, which can cause severe perceptual anomalies and ultimately compromise the safety of autonomous driving systems. To address this, we propose a resilient and plug-and-play BEV perception method, RESBev, which can be easily applied to existing BEV perception methods to enhance their robustness to diverse disturbances. Specifically, we reframe perception robustness as a latent semantic prediction problem. A latent world model is constructed to extract spatiotemporal correlations across sequential BEV observations, thereby learning the underlying BEV state transitions to predict clean BEV features for reconstructing corrupted observations. The proposed framework operates at the semantic feature level of the Lift-Splat-Shoot pipeline, enabling recovery that generalizes across both natural disturbances and adversarial attacks without modifying the underlying backbone. Extensive experiments on the nuScenes dataset demonstrate that, with few-shot fine-tuning, RESBev significantly improves the robustness of existing BEV perception models against various external disturbances and adversarial attacks.
Conquering Ghosts: Relation Learning for Information Reliability Representation and End-to-End Robust Navigation
Mar 14, 2022
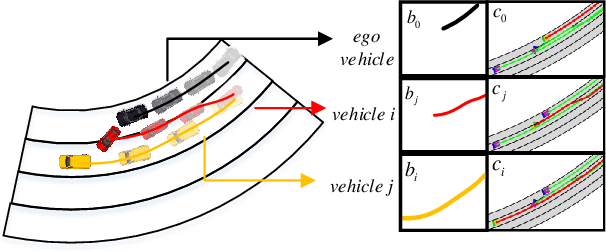
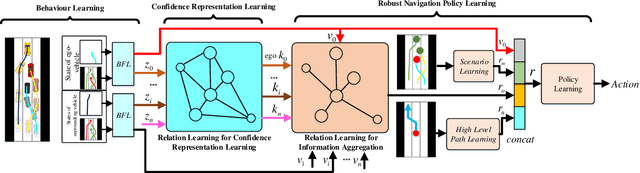

Environmental disturbances, such as sensor data noises, various lighting conditions, challenging weathers and external adversarial perturbations, are inevitable in real self-driving applications. Existing researches and testings have shown that they can severely influence the vehicles perception ability and performance, one of the main issue is the false positive detection, i.e., the ghost object which is not real existed or occurs in the wrong position (such as a non-existent vehicle). Traditional navigation methods tend to avoid every detected objects for safety, however, avoiding a ghost object may lead the vehicle into a even more dangerous situation, such as a sudden break on the highway. Considering the various disturbance types, it is difficult to address this issue at the perceptual aspect. A potential solution is to detect the ghost through relation learning among the whole scenario and develop an integrated end-to-end navigation system. Our underlying logic is that the behavior of all vehicles in the scene is influenced by their neighbors, and normal vehicles behave in a logical way, while ghost vehicles do not. By learning the spatio-temporal relation among surrounding vehicles, an information reliability representation is learned for each detected vehicle and then a robot navigation network is developed. In contrast to existing works, we encourage the network to learn how to represent the reliability and how to aggregate all the information with uncertainties by itself, thus increasing the efficiency and generalizability. To the best of the authors knowledge, this paper provides the first work on using graph relation learning to achieve end-to-end robust navigation in the presence of ghost vehicles. Simulation results in the CARLA platform demonstrate the feasibility and effectiveness of the proposed method in various scenarios.