 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMR-LLM: Industrial Multi-Robot Task Planning and Program Generation using Large Language Models
Mar 03, 2026In modern industrial production, multiple robots often collaborate to complete complex manufacturing tasks. Large language models (LLMs), with their strong reasoning capabilities, have shown potential in coordinating robots for simple household and manipulation tasks. However, in industrial scenarios, stricter sequential constraints and more complex dependencies within tasks present new challenges for LLMs. To address this, we propose IMR-LLM, a novel LLM-driven Industrial Multi-Robot task planning and program generation framework. Specifically, we utilize LLMs to assist in constructing disjunctive graphs and employ deterministic solving methods to obtain a feasible and efficient high-level task plan. Based on this, we use a process tree to guide LLMs to generate executable low-level programs. Additionally, we create IMR-Bench, a challenging benchmark that encompasses multi-robot industrial tasks across three levels of complexity. Experimental results indicate that our method significantly surpasses existing methods across all evaluation metrics.
Photo-to-Shape Material Transfer for Diverse Structures
May 09, 2022
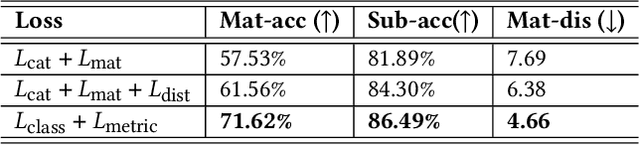
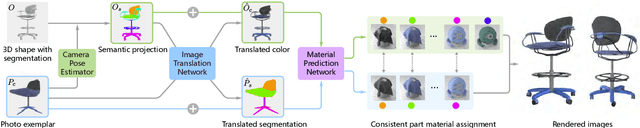
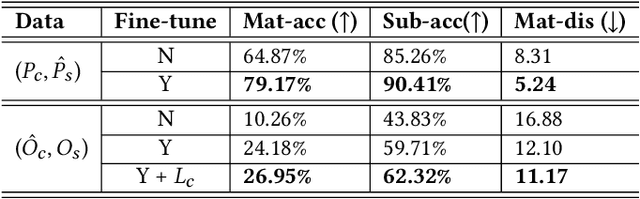
We introduce a method for assigning photorealistic relightable materials to 3D shapes in an automatic manner. Our method takes as input a photo exemplar of a real object and a 3D object with segmentation, and uses the exemplar to guide the assignment of materials to the parts of the shape, so that the appearance of the resulting shape is as similar as possible to the exemplar. To accomplish this goal, our method combines an image translation neural network with a material assignment neural network. The image translation network translates the color from the exemplar to a projection of the 3D shape and the part segmentation from the projection to the exemplar. Then, the material prediction network assigns materials from a collection of realistic materials to the projected parts, based on the translated images and perceptual similarity of the materials. One key idea of our method is to use the translation network to establish a correspondence between the exemplar and shape projection, which allows us to transfer materials between objects with diverse structures. Another key idea of our method is to use the two pairs of (color, segmentation) images provided by the image translation to guide the material assignment, which enables us to ensure the consistency in the assignment. We demonstrate that our method allows us to assign materials to shapes so that their appearances better resemble the input exemplars, improving the quality of the results over the state-of-the-art method, and allowing us to automatically create thousands of shapes with high-quality photorealistic materials. Code and data for this paper are available at https://github.com/XiangyuSu611/TMT.