 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeATN3D: Density-Aware LiDAR-Radar Early 3D Object Detection Under Extreme Sparsity
Jun 08, 20263D object detection is the backbone of perception for automated vehicles (AV) and broader intelligent transportation systems applications. Long-range detection is challenging because sensing evidence is sparse; yet this ``long-range'' scenario is routine in traffic. Although >30m is often labeled long-range in computer vision, on roadways it affords only approx. 1-2s for perception and decision-making. Under such extreme sparsity, two core challenges arise. First, early multimodal fusion tends to discard sparsity information and inject noise from empty or falsely occupied cells, degrading long-range recall. Second, context-agnostic uniform channel supervision favors dense and near-range samples, leaving far and small objects under-optimized, delaying the earliest detection of distant objects. We propose ``Ask The Neighbor'' (ATN3D), a LiDAR-Radar framework tailored for sparse-range conditions. ATN3D introduces (i) Density-aware early fusion with cross-modal gating that conditions fusion on per-voxel density/sparsity and Radar evidence, (ii) Occupancy-gated neighborhood aggregation with circular kernels to aggregate only from credible cells, (iii) Evidence-conditioned channel self-attention to adapt channel weights with weather/range, and (iv) a Range-aware loss that re-balances classification and localization by distance, aligning training with distance-stratified evaluation. On the VoD benchmark across clear and foggy conditions, ATN3D surpasses strong baselines: +3.55% mAP in clear weather and +8.41% mAP under simulated heavy fog; for >30m objects, gains are +3.33% (clear) and +2.09% (heavy fog). These results indicate earlier and more reliable long-range detections under sparse sensing in on-road traffic.
HMPDM: A Diffusion Model for Driving Video Prediction with Historical Motion Priors
Mar 28, 2026Video prediction is a useful function for autonomous driving, enabling intelligent vehicles to reliably anticipate how driving scenes will evolve and thereby supporting reasoning and safer planning. However, existing models are constrained by multi-stage training pipelines and remain insufficient in modeling the diverse motion patterns in real driving scenes, leading to degraded temporal consistency and visual quality. To address these challenges, this paper introduces the historical motion priors-informed diffusion model (HMPDM), a video prediction model that leverages historical motion priors to enhance motion understanding and temporal coherence. The proposed deep learning system introduces three key designs: (i) a Temporal-aware Latent Conditioning (TaLC) module for implicit historical motion injection; (ii) a Motion-aware Pyramid Encoder (MaPE) for multi-scale motion representation; (iii) a Self-Conditioning (SC) strategy for stable iterative denoising. Extensive experiments on the Cityscapes and KITTI benchmarks demonstrate that HMPDM outperforms state-of-the-art video prediction methods with efficiency, achieving a 28.2% improvement in FVD on Cityscapes under the same monocular RGB input configuration setting. The implementation codes are publicly available at https://github.com/KELISBU/HMPDM.
CrashChat: A Multimodal Large Language Model for Multitask Traffic Crash Video Analysis
Dec 21, 2025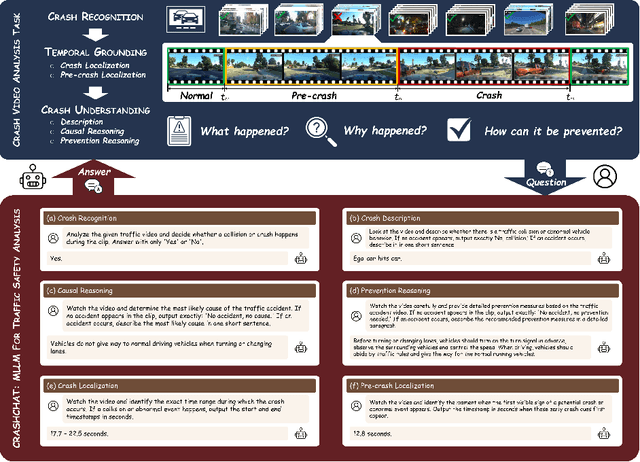
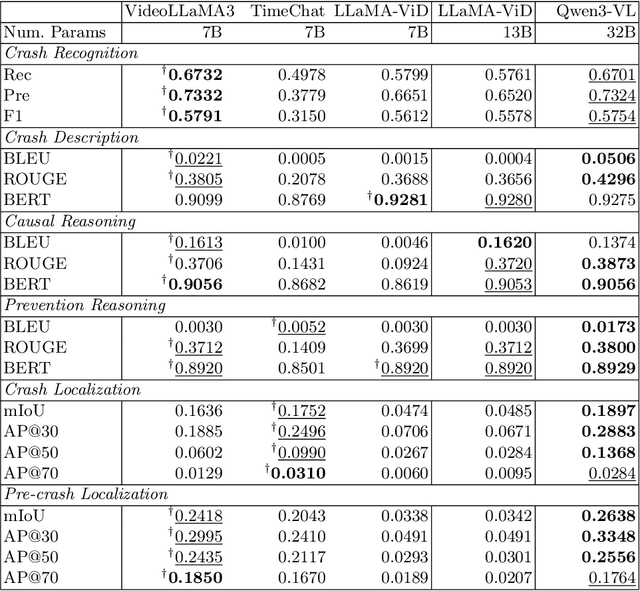
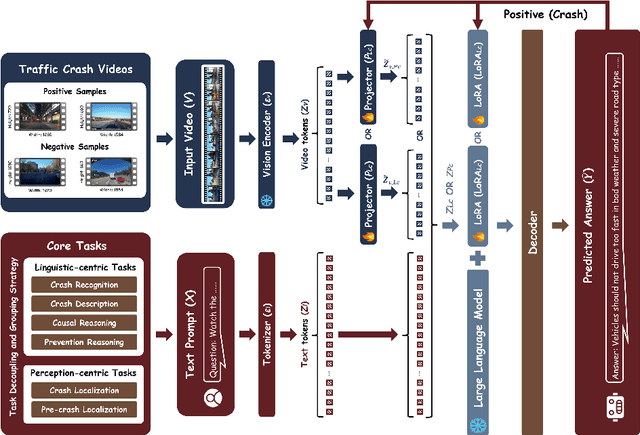
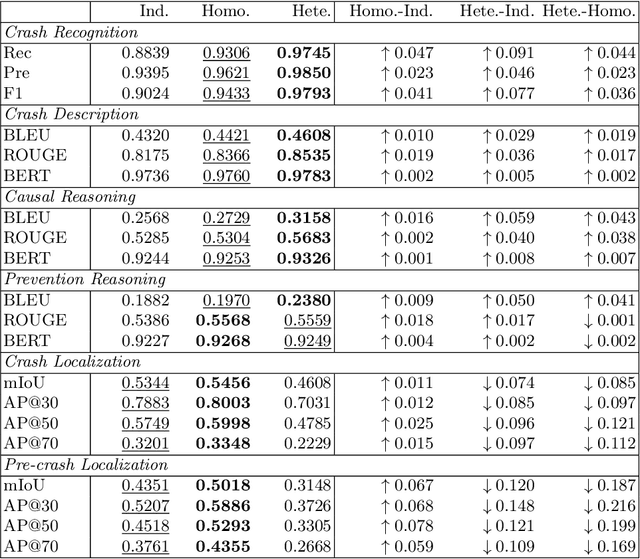
Automating crash video analysis is essential to leverage the growing availability of driving video data for traffic safety research and accountability attribution in autonomous driving. Crash video analysis is a challenging multitask problem due to the complex spatiotemporal dynamics of crash events in video data and the diverse analytical requirements involved. It requires capabilities spanning crash recognition, temporal grounding, and high-level video understanding. Existing models, however, cannot perform all these tasks within a unified framework, and effective training strategies for such models remain underexplored. To fill these gaps, this paper proposes CrashChat, a multimodal large language model (MLLM) for multitask traffic crash analysis, built upon VideoLLaMA3. CrashChat acquires domain-specific knowledge through instruction fine-tuning and employs a novel multitask learning strategy based on task decoupling and grouping, which maximizes the benefit of joint learning within and across task groups while mitigating negative transfer. Numerical experiments on consolidated public datasets demonstrate that CrashChat consistently outperforms existing MLLMs across model scales and traditional vision-based methods, achieving state-of-the-art performance. It reaches near-perfect accuracy in crash recognition, a 176\% improvement in crash localization, and a 40\% improvement in the more challenging pre-crash localization. Compared to general MLLMs, it substantially enhances textual accuracy and content coverage in crash description and reasoning tasks, with 0.18-0.41 increases in BLEU scores and 0.18-0.42 increases in ROUGE scores. Beyond its strong performance, CrashChat is a convenient, end-to-end analytical tool ready for practical implementation. The dataset and implementation code for CrashChat are available at https://github.com/Liangkd/CrashChat.
Deployment of Leader-Follower Automated Vehicle Systems for Smart Work Zone Applications with a Queuing-based Traffic Assignment Approach
Jul 23, 2023The emerging technology of the Autonomous Truck Mounted Attenuator (ATMA), a leader-follower style vehicle system, utilizes connected and automated vehicle capabilities to enhance safety during transportation infrastructure maintenance in work zones. However, the speed difference between ATMA vehicles and general vehicles creates a moving bottleneck that reduces capacity and increases queue length, resulting in additional delays. The different routes taken by ATMA cause diverse patterns of time-varying capacity drops, which may affect the user equilibrium traffic assignment and lead to different system costs. This manuscript focuses on optimizing the routing for ATMA vehicles in a network to minimize the system cost associated with the slow-moving operation. To achieve this, a queuing-based traffic assignment approach is proposed to identify the system cost caused by the ATMA system. A queuing-based time-dependent (QBTD) travel time function, considering capacity drop, is introduced and applied in the static user equilibrium traffic assignment problem, with a result of adding dynamic characteristics. Subsequently, we formulate the queuing-based traffic assignment problem and solve it using a modified path-based algorithm. The methodology is validated using a small-size and a large-size network and compared with two benchmark models to analyze the benefit of capacity drop modeling and QBTD travel time function. Furthermore, the approach is applied to quantify the impact of different routes on the traffic system and identify an optimal route for ATMA vehicles performing maintenance work. Finally, sensitivity analysis is conducted to explore how the impact changes with variations in traffic demand and capacity reduction.
Modeling and Development of Operation Guidelines for Leader-Follower Autonomous Truck-Mounted Attenuator Vehicles
Apr 03, 2021

Mobile and slow moving operations, such as striping, sweeping, bridge flushing and pothole patching, are critical for efficient and safe operation of the highway transportation system. A successfully implemented leader follower autonomous truck mounted attenuators system will eliminate all injuries to DOT employees in follow truck provided appropriate Statutory authority. The leader follower system design imposes more requirements to the lead truck drivers in order to ensure a safe and smooth system operation. The driver is now required to make driving decisions not only from the lead truck's perspective, but also consider the potential implications of his decisions to the follow truck. This project aims to develop a set of rules and clear instructions for ATMA system operation