 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Depth-Adaptive Filtering Method for Effective GPR Tree Roots Detection in Tropical Area
May 30, 2023This study presents a technique for processing Stepfrequency continuous wave (SFCW) ground penetrating radar (GPR) data to detect tree roots. SFCW GPR is portable and enables precise control of energy levels, balancing depth and resolution trade-offs. However, the high-frequency components of the transmission band suffers from poor penetrating capability and generates noise that interferes with root detection. The proposed time-frequency filtering technique uses a short-time Fourier transform (STFT) to track changes in frequency spectrum density over time. To obtain the filter window, a weighted linear regression (WLR) method is used. By adopting a conversion method that is a variant of the chirp Z-Transform (CZT), the timefrequency window filters out frequency samples that are not of interest when doing the frequency-to-time domain data conversion. The proposed depth-adaptive filter window can selfadjust to different scenarios, making it independent of soil information and effectively determines subsurface tree roots. The technique is successfully validated using SFCW GPR data from actual sites in a tropical area with different soil moisture levels, and the two-dimensional (2D) radar map of subsurface root systems is highly improved compared to existing methods.
Risk-aware Safe Control for Decentralized Multi-agent Systems via Dynamic Responsibility Allocation
May 22, 2023Decentralized control schemes are increasingly favored in various domains that involve multi-agent systems due to the need for computational efficiency as well as general applicability to large-scale systems. However, in the absence of an explicit global coordinator, it is hard for distributed agents to determine how to efficiently interact with others. In this paper, we present a risk-aware decentralized control framework that provides guidance on how much relative responsibility share (a percentage) an individual agent should take to avoid collisions with others while moving efficiently without direct communications. We propose a novel Control Barrier Function (CBF)-inspired risk measurement to characterize the aggregate risk agents face from potential collisions under motion uncertainty. We use this measurement to allocate responsibility shares among agents dynamically and develop risk-aware decentralized safe controllers. In this way, we are able to leverage the flexibility of robots with lower risk to improve the motion flexibility for those with higher risk, thus achieving improved collective safety. We demonstrate the validity and efficiency of our proposed approach through two examples: ramp merging in autonomous driving and a multi-agent position-swapping game.
Minimally Constrained Multi-Robot Coordination with Line-of-sight Connectivity Maintenance
Mar 07, 2023In this paper, we consider a team of mobile robots executing simultaneously multiple behaviors by different subgroups, while maintaining global and subgroup line-of-sight (LOS) network connectivity that minimally constrains the original multi-robot behaviors. The LOS connectivity between pairwise robots is preserved when two robots stay within the limited communication range and their LOS remains occlusion-free from static obstacles while moving. By using control barrier functions (CBF) and minimum volume enclosing ellipsoids (MVEE), we first introduce the LOS connectivity barrier certificate (LOS-CBC) to characterize the state-dependent admissible control space for pairwise robots, from which their resulting motion will keep the two robots LOS connected over time. We then propose the Minimum Line-of-Sight Connectivity Constraint Spanning Tree (MLCCST) as a step-wise bilevel optimization framework to jointly optimize (a) the minimum set of LOS edges to actively maintain, and (b) the control revision with respect to a nominal multi-robot controller due to LOS connectivity maintenance. As proved in the theoretical analysis, this allows the robots to improvise the optimal composition of LOS-CBC control constraints that are least constraining around the nominal controllers, and at the same time enforce the global and subgroup LOS connectivity through the resulting preserved set of pairwise LOS edges. The framework thus leads to robots staying as close to their nominal behaviors, while exhibiting dynamically changing LOS-connected network topology that provides the greatest flexibility for the existing multi-robot tasks in real time. We demonstrate the effectiveness of our approach through simulations with up to 64 robots.
Sample-efficient Safe Learning for Online Nonlinear Control with Control Barrier Functions
Jul 29, 2022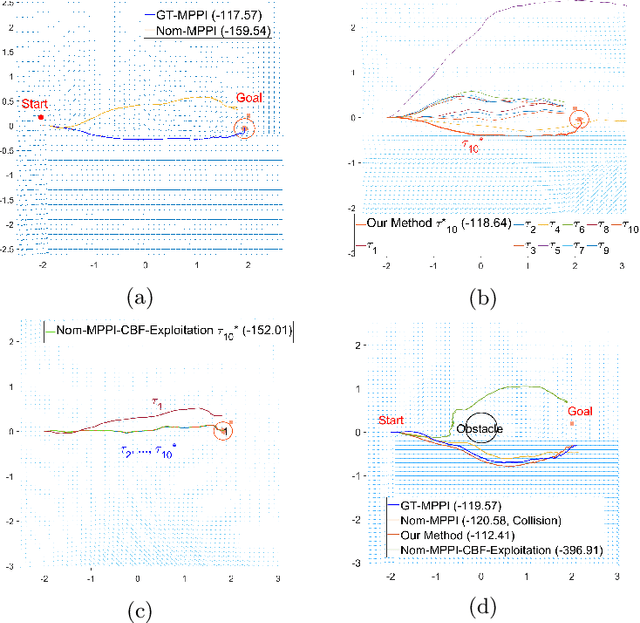
Reinforcement Learning (RL) and continuous nonlinear control have been successfully deployed in multiple domains of complicated sequential decision-making tasks. However, given the exploration nature of the learning process and the presence of model uncertainty, it is challenging to apply them to safety-critical control tasks due to the lack of safety guarantee. On the other hand, while combining control-theoretical approaches with learning algorithms has shown promise in safe RL applications, the sample efficiency of safe data collection process for control is not well addressed. In this paper, we propose a \emph{provably} sample efficient episodic safe learning framework for online control tasks that leverages safe exploration and exploitation in an unknown, nonlinear dynamical system. In particular, the framework 1) extends control barrier functions (CBFs) in a stochastic setting to achieve provable high-probability safety under uncertainty during model learning and 2) integrates an optimism-based exploration strategy to efficiently guide the safe exploration process with learned dynamics for \emph{near optimal} control performance. We provide formal analysis on the episodic regret bound against the optimal controller and probabilistic safety with theoretical guarantees. Simulation results are provided to demonstrate the effectiveness and efficiency of the proposed algorithm.
Responsibility-associated Multi-agent Collision Avoidance with Social Preferences
Jun 17, 2022
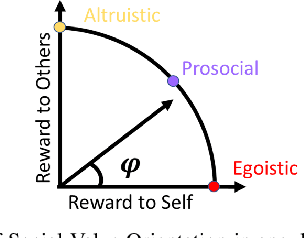

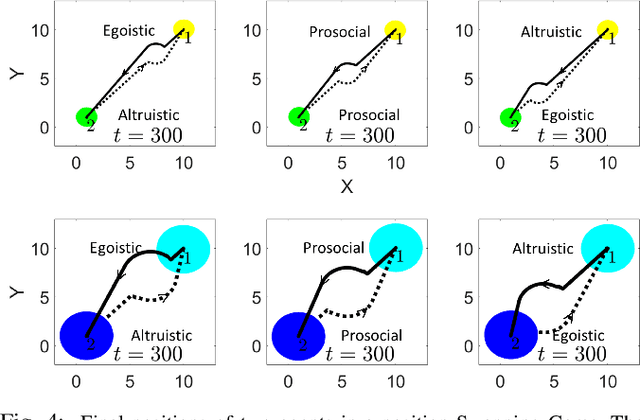
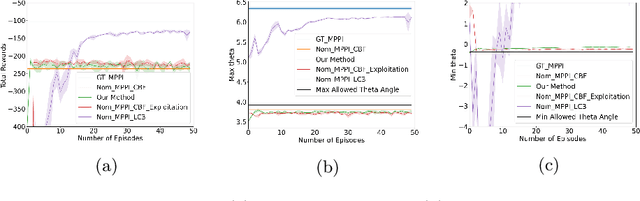
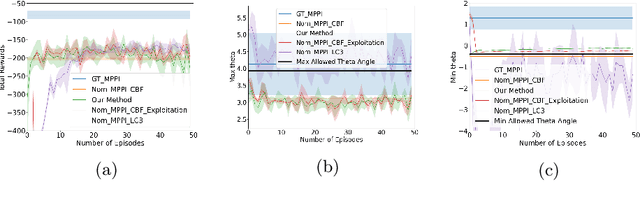
This paper introduces a novel social preference-aware decentralized safe control framework to address the responsibility allocation problem in multi-agent collision avoidance. Considering that agents do not necessarily cooperate in symmetric ways, this paper focuses on semi-cooperative behavior among heterogeneous agents with varying cooperation levels. Drawing upon the idea of Social Value Orientation (SVO) for quantifying the individual selfishness, we propose a novel concept of Responsibility-associated Social Value Orientation (R-SVO) to express the intended relative social implications between pairwise agents. This is used to redefine each agent's social preferences or personalities in terms of corresponding responsibility shares in contributing to the coordination scenario, such as semi-cooperative collision avoidance where all agents interact in an asymmetric way. By incorporating such relative social implications through proposed Local Pairwise Responsibility Weights, we develop a Responsibility-associated Control Barrier Function-based safe control framework for individual agents, and multi-agent collision avoidance is achieved with formally provable safety guarantees. Simulations are provided to demonstrate the effectiveness and efficiency of the proposed framework in several multi-agent navigation tasks, such as a position-swapping game, a self-driving car highway ramp merging scenario, and a circular position swapping game.
Accurate Tree Roots Positioning and Sizing over Undulated Ground Surfaces by Common Offset GPR Measurements
May 27, 2022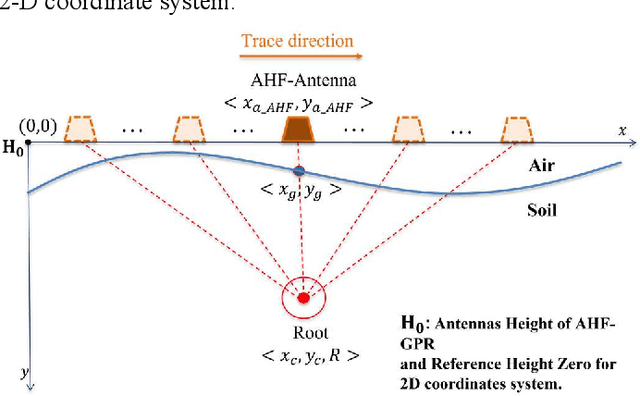
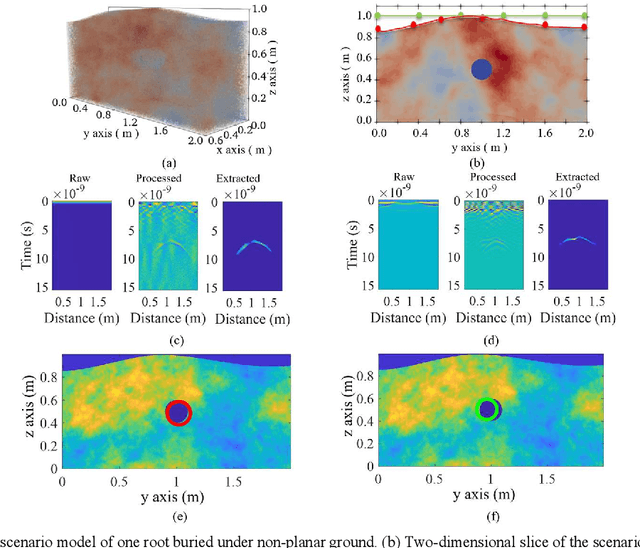
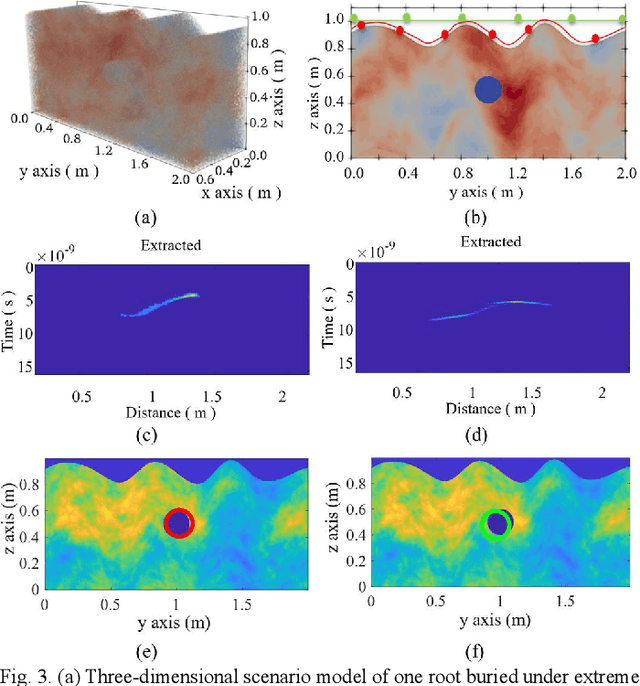
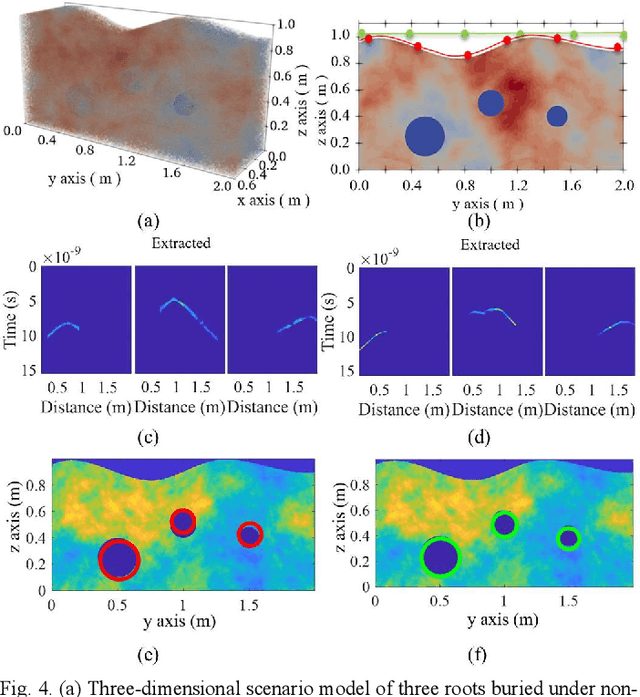
Tree roots detection is a popular application of the Ground-penetrating radar (GPR). Normally, the ground surface above the tree roots is assumed to be flat, and standard processing methods based on hyperbolic fitting are applied to the hyperbolae reflection patterns of tree roots for detection purposes. When the surface of the land is undulating (not flat), these typical hyperbolic fitting methods becomes inaccurate. This is because, the reflection patterns change with the uneven ground surfaces. When the soil surface is not flat, it is inaccurate to use the peak point of an asymmetric reflection pattern to identify the depth and horizontal position of the underground target. The reflection patterns of the complex shapes due to extreme surface variations results in analysis difficulties. Furthermore, when multiple objects are buried under an undulating ground, it is hard to judge their relative positions based on a B-scan that assumes a flat ground. In this paper, a roots fitting method based on electromagnetic waves (EM) travel time analysis is proposed to take into consideration the realistic undulating ground surface. A wheel-based (WB) GPR and an antenna-height-fixed (AHF) GPR System are presented, and their corresponding fitting models are proposed. The effectiveness of the proposed method is demonstrated and validated through numerical examples and field experiments.
Dual-Cross-Polarized GPR Measurement Method for Detection and Orientation Estimation of Shallowly Buried Elongated Object
May 17, 2022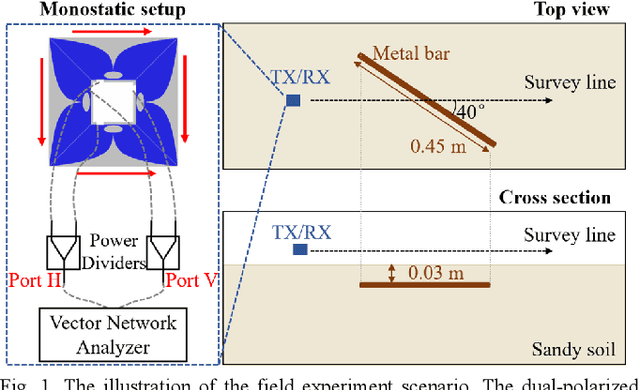
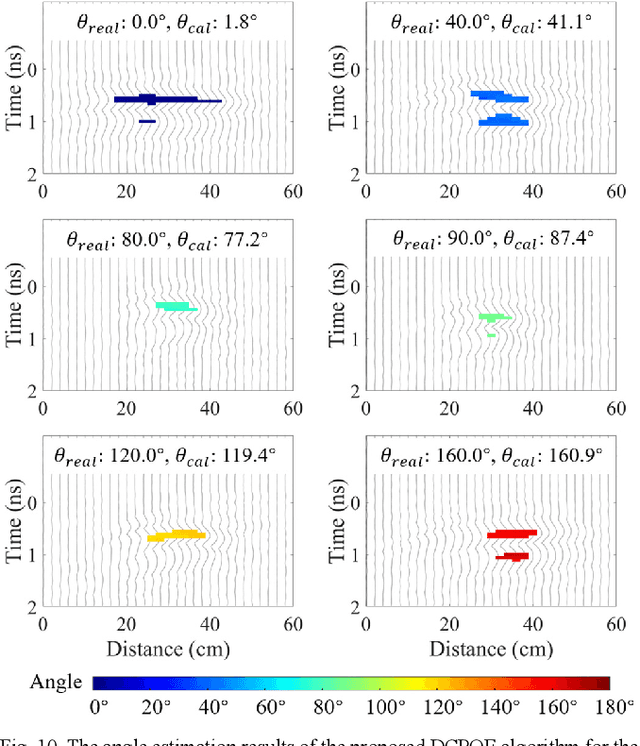
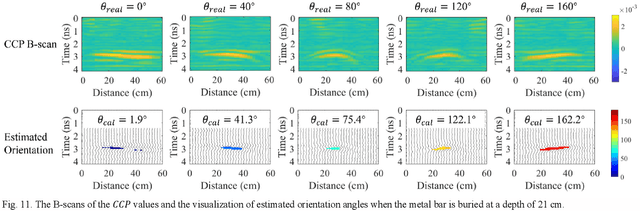
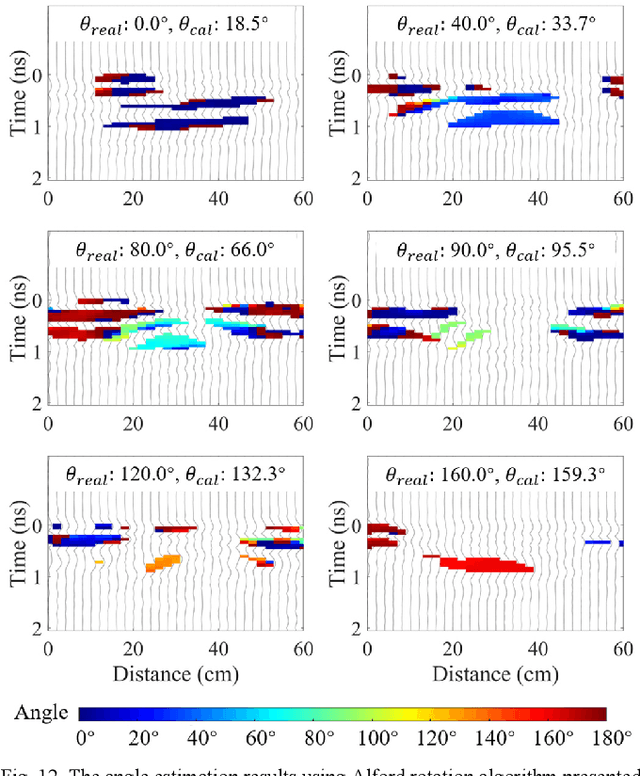
Detecting a shallowly buried and elongated object and estimating its orientation using a commonly adopted co-polarized GPR system is challenging due to the presence of strong ground clutter that masks the target reflection. A cross-polarized configuration can be used to suppress ground clutter and reveal the object reflection, but it suffers from inconsistent detection capability which significantly varies with different object orientations. To address this issue, we propose a dual-cross-polarized detection (DCPD) method which utilizes two cross-polarized antennas with a special arrangement to detect the object. The signals reflected by the object and collected by the two antennas are combined in a rotationally invariant manner to ensure both effective ground clutter suppression and consistent detection irrespective of the object orientation. In addition, we present a dual-cross-polarized orientation estimation (DCPOE) algorithm to estimate the object orientation from the two cross-polarized data. The proposed DCPOE algorithm is less affected by environmental noise and performs robust and accurate azimuth angle estimation. The effectiveness of the proposed techniques in the detection and orientation estimation and their advantages over the existing method have been demonstrated using experimental data. Comparison results show that the maximum and average errors are 22.3{\deg} and 10.9{\deg} for the Alford rotation algorithm, while those are 4.9{\deg} and 1.8{\deg} for the proposed DCPOE algorithm in the demonstrated shallowly buried object cases. The proposed techniques can be unified in a framework to facilitate the investigation and mapping of shallowly buried and elongated targets.
Provable Probabilistic Safety and Feasibility-Assured Control for Autonomous Vehicles using Exponential Control Barrier Functions
May 08, 2022
With the increasing need for safe control in the domain of autonomous driving, model-based safety-critical control approaches are widely used, especially Control Barrier Function (CBF)-based approaches. Among them, Exponential CBF (eCBF) is particularly popular due to its realistic applicability to high-relative-degree systems. However, for most of the optimization-based controllers utilizing CBF-based constraints, solution feasibility is a common issue arising from potential conflict among different constraints. Moreover, how to incorporate uncertainty into the eCBF-based constraints in high-relative-degree systems to account for safety remains an open challenge. In this paper, we present a novel approach to extend an eCBF-based safe critical controller to a probabilistic setting to handle potential motion uncertainty from system dynamics. More importantly, we leverage an optimization-based technique to provide a solution feasibility guarantee in run time, while ensuring probabilistic safety. Lane changing and intersection handling are demonstrated as two use cases, and experiment results are provided to show the effectiveness of the proposed approach.
Noncooperative Herding With Control Barrier Functions: Theory and Experiments
Apr 22, 2022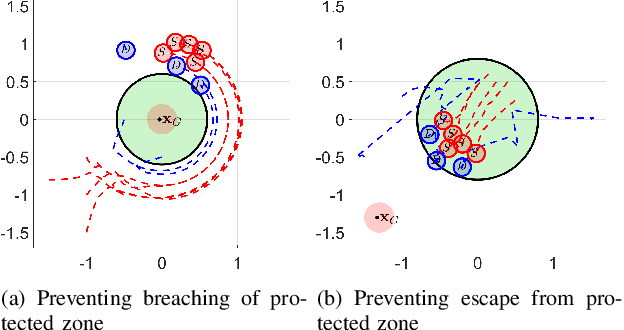
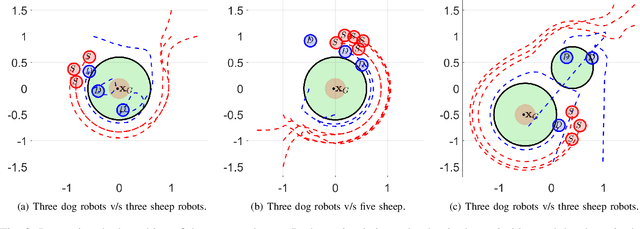


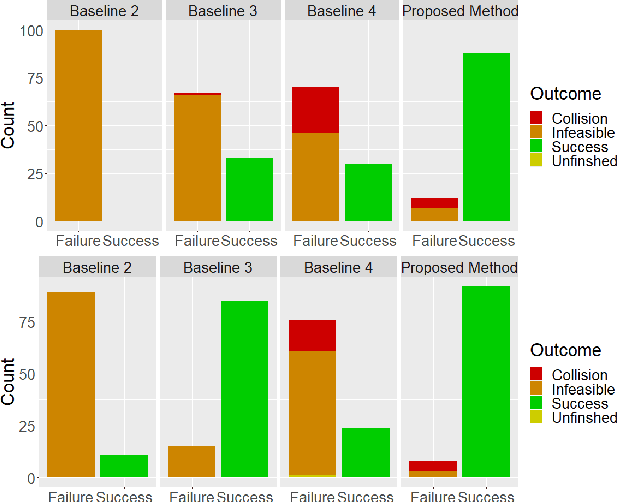
In this paper, we consider the problem of protecting a high-value unit from inadvertent attack by a group of agents using defending robots. Specifically, we develop a control strategy for the defending agents that we call "dog robots" to prevent a flock of "sheep agents" from breaching a protected zone. We take recourse to control barrier functions to pose this problem and exploit the interaction dynamics between the sheep and dogs to find dogs' velocities that result in the sheep getting repelled from the zone. We solve a QP reactively that incorporates the defending constraints to compute the desired velocities for all dogs. Owing to this, our proposed framework is composable \textit{i.e.} it allows for simultaneous inclusion of multiple protected zones in the constraints on dog robots' velocities. We provide a theoretical proof of feasibility of our strategy for the one dog/one sheep case. Additionally, we provide empirical results of two dogs defending the protected zone from upto ten sheep averaged over a hundred simulations and report high success rates. We also demonstrate this algorithm experimentally on non-holonomic robots. Videos of these results are available at https://tinyurl.com/4dj2kjwx.
SFCW GPR tree roots detection enhancement by time frequency analysis in tropical areas
Apr 06, 2022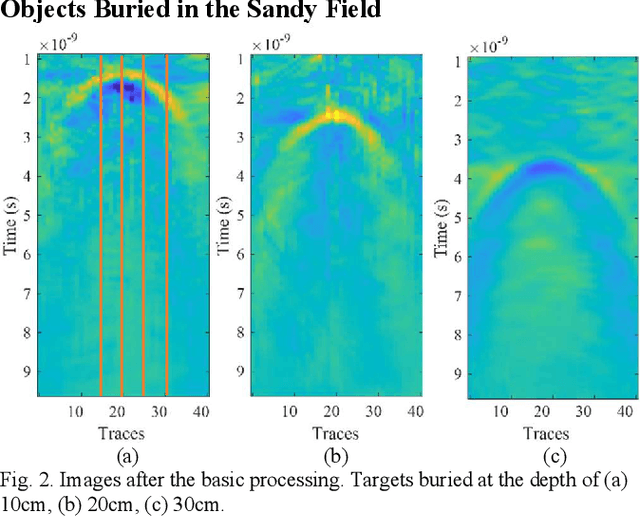
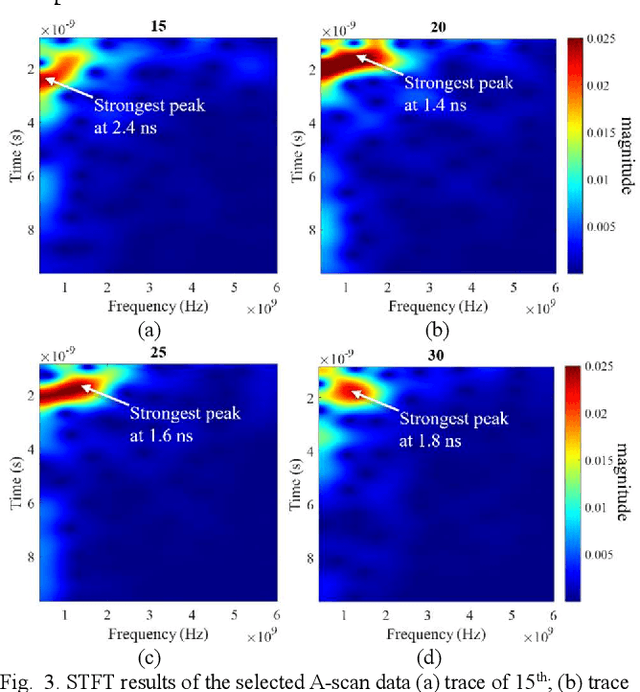
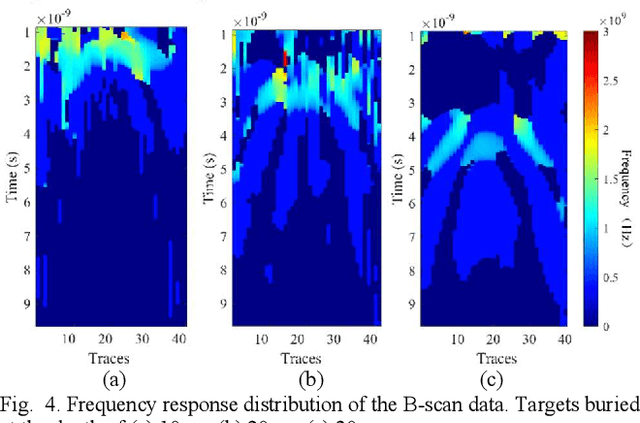
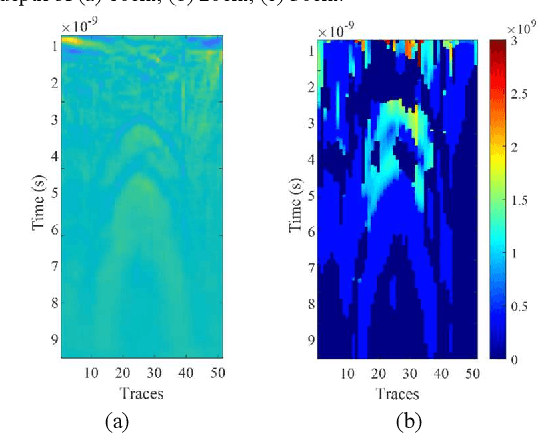
Accurate monitoring of tree roots using ground penetrating radar (GPR) is very useful in assessing the trees health. In high moisture tropical areas such as Singapore, tree fall due to root rot can cause loss of lives and properties. The tropical complex soil characteristics due to the high moisture content tends to affect penetration depth of the signal. This limits the depth range of the GPR. Typically, a wide band signal is used to increase the penetration depth and to improve the resolution of the GPR. However, this broad band frequency tends to be noisy and selective frequency filtering is required for noise reduction. Therefore, in this paper, we adapt the stepped frequency continuous wave (SFCW) GPR and propose the use of a Joint time frequency analysis (JTFA) method called short time Fourier transform (STFT), to reduce noise and enhance tree root detection. The proposed methodology is illustrated and tested with controlled experiments and real tree roots testing. The results show promising prospects of the method for tree roots detection in tropical areas.