 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Forensics in AI-Native Wireless Networks: Taxonomy, Applications, and Case Study
May 14, 2026As artificial intelligence (AI) is increasingly embedded in wireless networks, models are becoming core components that influence signal processing, resource scheduling and network control. However, model anomalies, tampering and malicious functions also introduce new security risks. In this article, we focus on model forensics in AI-native wireless networks. Specifically, we first discuss key problems including model authenticity verification, malicious function identification and accountability tracing, and summarize the main categories of model forensics. We then explain the role of model forensics in AI-native wireless networks and review representative application scenarios. In the case study, we use RF fingerprinting as an example and present two concrete workflows based on watermark authentication and backdoor detection, illustrating how provenance authentication and malicious behavior identification can be implemented in practice. The results show that model forensics can provide important support for anomaly assessment, provenance tracing and trustworthy operation in AI-native wireless networks. Finally, we outline several promising directions for future research in this emerging area.
OccFace: Unified Occlusion-Aware Facial Landmark Detection with Per-Point Visibility
Feb 11, 2026Accurate facial landmark detection under occlusion remains challenging, especially for human-like faces with large appearance variation and rotation-driven self-occlusion. Existing detectors typically localize landmarks while handling occlusion implicitly, without predicting per-point visibility that downstream applications can benefits. We present OccFace, an occlusion-aware framework for universal human-like faces, including humans, stylized characters, and other non-human designs. OccFace adopts a unified dense 100-point layout and a heatmap-based backbone, and adds an occlusion module that jointly predicts landmark coordinates and per-point visibility by combining local evidence with cross-landmark context. Visibility supervision mixes manual labels with landmark-aware masking that derives pseudo visibility from mask-heatmap overlap. We also create an occlusion-aware evaluation suite reporting NME on visible vs. occluded landmarks and benchmarking visibility with Occ AP, F1@0.5, and ROC-AUC, together with a dataset annotated with 100-point landmarks and per-point visibility. Experiments show improved robustness under external occlusion and large head rotations, especially on occluded regions, while preserving accuracy on visible landmarks.
Advancing Embodied Agent Security: From Safety Benchmarks to Input Moderation
Apr 22, 2025



Embodied agents exhibit immense potential across a multitude of domains, making the assurance of their behavioral safety a fundamental prerequisite for their widespread deployment. However, existing research predominantly concentrates on the security of general large language models, lacking specialized methodologies for establishing safety benchmarks and input moderation tailored to embodied agents. To bridge this gap, this paper introduces a novel input moderation framework, meticulously designed to safeguard embodied agents. This framework encompasses the entire pipeline, including taxonomy definition, dataset curation, moderator architecture, model training, and rigorous evaluation. Notably, we introduce EAsafetyBench, a meticulously crafted safety benchmark engineered to facilitate both the training and stringent assessment of moderators specifically designed for embodied agents. Furthermore, we propose Pinpoint, an innovative prompt-decoupled input moderation scheme that harnesses a masked attention mechanism to effectively isolate and mitigate the influence of functional prompts on moderation tasks. Extensive experiments conducted on diverse benchmark datasets and models validate the feasibility and efficacy of the proposed approach. The results demonstrate that our methodologies achieve an impressive average detection accuracy of 94.58%, surpassing the performance of existing state-of-the-art techniques, alongside an exceptional moderation processing time of merely 0.002 seconds per instance.
3PSDF: Three-Pole Signed Distance Function for Learning Surfaces with Arbitrary Topologies
May 31, 2022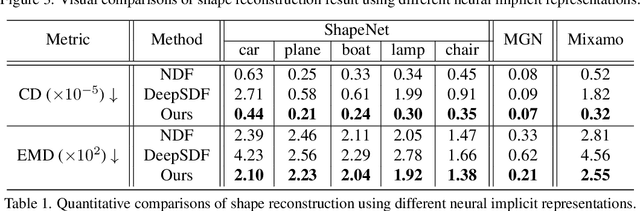

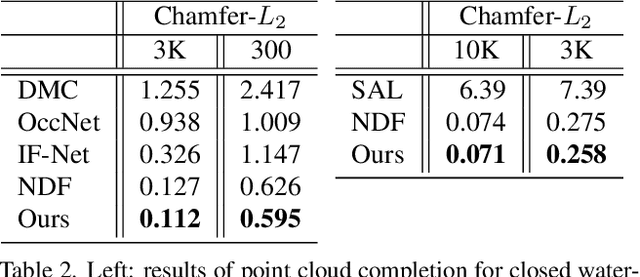
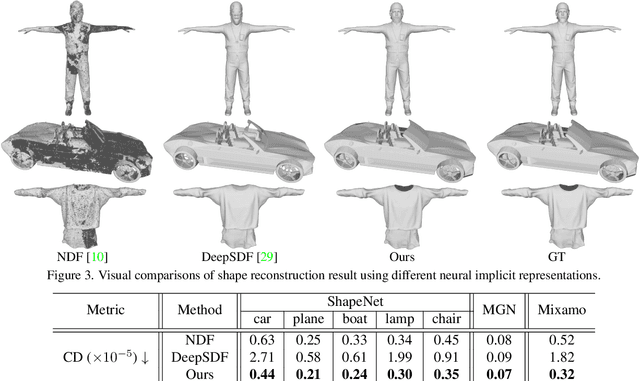
Recent advances in learning 3D shapes using neural implicit functions have achieved impressive results by breaking the previous barrier of resolution and diversity for varying topologies. However, most of such approaches are limited to closed surfaces as they require the space to be divided into inside and outside. More recent works based on unsigned distance function have been proposed to handle complex geometry containing both the open and closed surfaces. Nonetheless, as their direct outputs are point clouds, robustly obtaining high-quality meshing results from discrete points remains an open question. We present a novel learnable implicit representation, called the three-pole signed distance function (3PSDF), that can represent non-watertight 3D shapes with arbitrary topologies while supporting easy field-to-mesh conversion using the classic Marching Cubes algorithm. The key to our method is the introduction of a new sign, the NULL sign, in addition to the conventional in and out labels. The existence of the null sign could stop the formation of a closed isosurface derived from the bisector of the in/out regions. Further, we propose a dedicated learning framework to effectively learn 3PSDF without worrying about the vanishing gradient due to the null labels. Experimental results show that our approach outperforms the previous state-of-the-art methods in a wide range of benchmarks both quantitatively and qualitatively.