 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperagents
Mar 19, 2026Self-improving AI systems aim to reduce reliance on human engineering by learning to improve their own learning and problem-solving processes. Existing approaches to self-improvement rely on fixed, handcrafted meta-level mechanisms, fundamentally limiting how fast such systems can improve. The Darwin Gödel Machine (DGM) demonstrates open-ended self-improvement in coding by repeatedly generating and evaluating self-modified variants. Because both evaluation and self-modification are coding tasks, gains in coding ability can translate into gains in self-improvement ability. However, this alignment does not generally hold beyond coding domains. We introduce \textbf{hyperagents}, self-referential agents that integrate a task agent (which solves the target task) and a meta agent (which modifies itself and the task agent) into a single editable program. Crucially, the meta-level modification procedure is itself editable, enabling metacognitive self-modification, improving not only the task-solving behavior, but also the mechanism that generates future improvements. We instantiate this framework by extending DGM to create DGM-Hyperagents (DGM-H), eliminating the assumption of domain-specific alignment between task performance and self-modification skill to potentially support self-accelerating progress on any computable task. Across diverse domains, the DGM-H improves performance over time and outperforms baselines without self-improvement or open-ended exploration, as well as prior self-improving systems. Furthermore, the DGM-H improves the process by which it generates new agents (e.g., persistent memory, performance tracking), and these meta-level improvements transfer across domains and accumulate across runs. DGM-Hyperagents offer a glimpse of open-ended AI systems that do not merely search for better solutions, but continually improve their search for how to improve.
Contrastive introspection (ConSpec) to rapidly identify invariant steps for success
Oct 12, 2022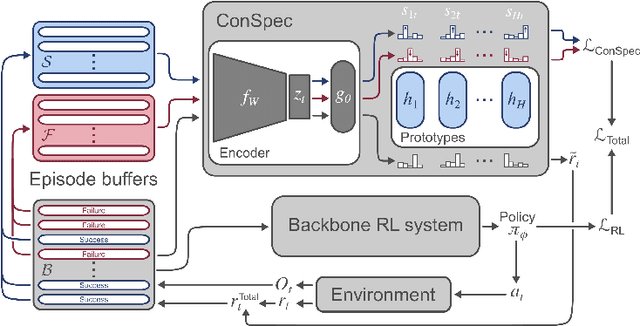
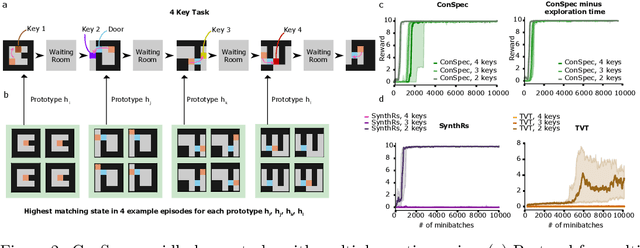
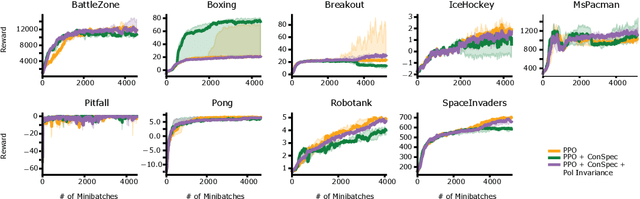
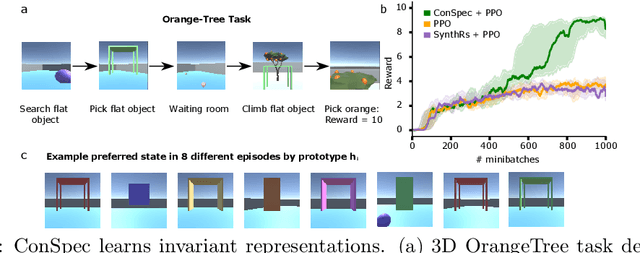
Reinforcement learning (RL) algorithms have achieved notable success in recent years, but still struggle with fundamental issues in long-term credit assignment. It remains difficult to learn in situations where success is contingent upon multiple critical steps that are distant in time from each other and from a sparse reward; as is often the case in real life. Moreover, how RL algorithms assign credit in these difficult situations is typically not coded in a way that can rapidly generalize to new situations. Here, we present an approach using offline contrastive learning, which we call contrastive introspection (ConSpec), that can be added to any existing RL algorithm and addresses both issues. In ConSpec, a contrastive loss is used during offline replay to identify invariances among successful episodes. This takes advantage of the fact that it is easier to retrospectively identify the small set of steps that success is contingent upon than it is to prospectively predict reward at every step taken in the environment. ConSpec stores this knowledge in a collection of prototypes summarizing the intermediate states required for success. During training, arrival at any state that matches these prototypes generates an intrinsic reward that is added to any external rewards. As well, the reward shaping provided by ConSpec can be made to preserve the optimal policy of the underlying RL agent. The prototypes in ConSpec provide two key benefits for credit assignment: (1) They enable rapid identification of all the critical states. (2) They do so in a readily interpretable manner, enabling out of distribution generalization when sensory features are altered. In summary, ConSpec is a modular system that can be added to any existing RL algorithm to improve its long-term credit assignment.