 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRetrospective on the 2021 BASALT Competition on Learning from Human Feedback
Apr 14, 2022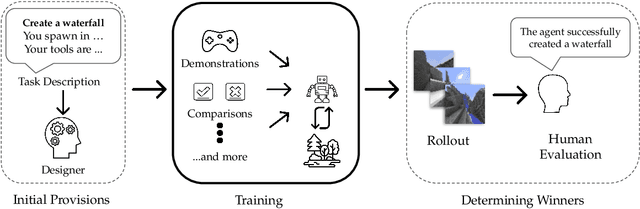
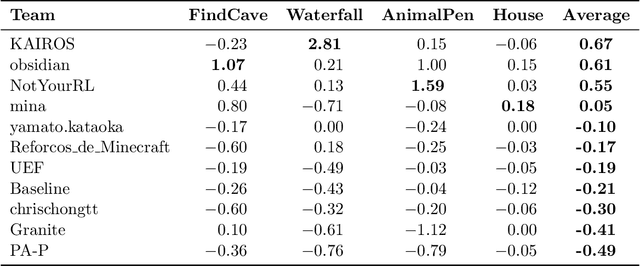
We held the first-ever MineRL Benchmark for Agents that Solve Almost-Lifelike Tasks (MineRL BASALT) Competition at the Thirty-fifth Conference on Neural Information Processing Systems (NeurIPS 2021). The goal of the competition was to promote research towards agents that use learning from human feedback (LfHF) techniques to solve open-world tasks. Rather than mandating the use of LfHF techniques, we described four tasks in natural language to be accomplished in the video game Minecraft, and allowed participants to use any approach they wanted to build agents that could accomplish the tasks. Teams developed a diverse range of LfHF algorithms across a variety of possible human feedback types. The three winning teams implemented significantly different approaches while achieving similar performance. Interestingly, their approaches performed well on different tasks, validating our choice of tasks to include in the competition. While the outcomes validated the design of our competition, we did not get as many participants and submissions as our sister competition, MineRL Diamond. We speculate about the causes of this problem and suggest improvements for future iterations of the competition.
Combining Learning from Human Feedback and Knowledge Engineering to Solve Hierarchical Tasks in Minecraft
Dec 07, 2021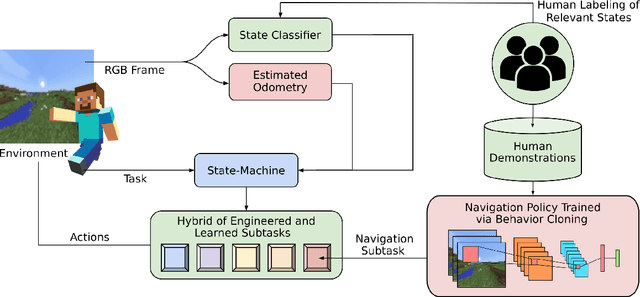
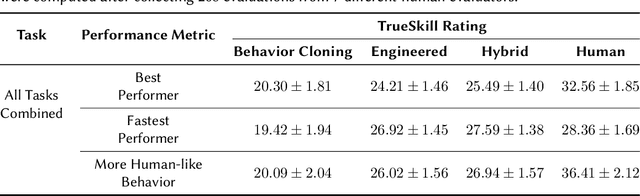

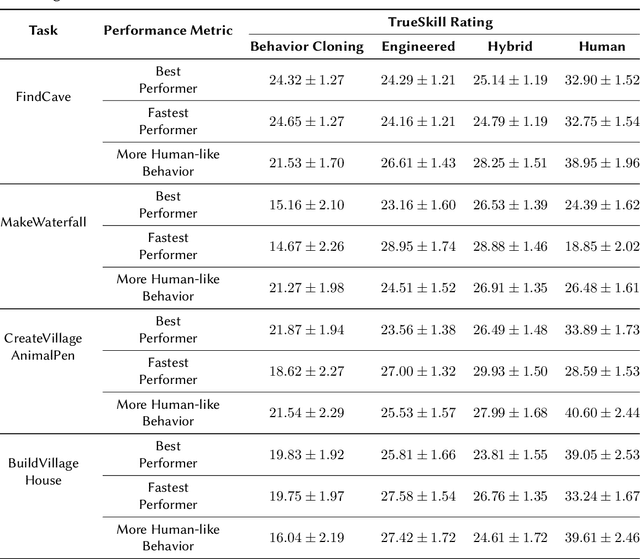
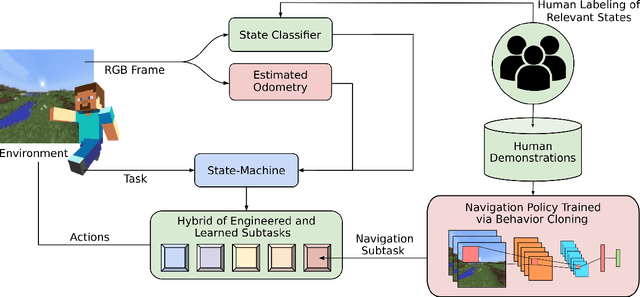
Real-world tasks of interest are generally poorly defined by human-readable descriptions and have no pre-defined reward signals unless it is defined by a human designer. Conversely, data-driven algorithms are often designed to solve a specific, narrowly defined, task with performance metrics that drives the agent's learning. In this work, we present the solution that won first place and was awarded the most human-like agent in the 2021 NeurIPS Competition MineRL BASALT Challenge: Learning from Human Feedback in Minecraft, which challenged participants to use human data to solve four tasks defined only by a natural language description and no reward function. Our approach uses the available human demonstration data to train an imitation learning policy for navigation and additional human feedback to train an image classifier. These modules, together with an estimated odometry map, are then combined into a state-machine designed based on human knowledge of the tasks that breaks them down in a natural hierarchy and controls which macro behavior the learning agent should follow at any instant. We compare this hybrid intelligence approach to both end-to-end machine learning and pure engineered solutions, which are then judged by human evaluators. Codebase is available at https://github.com/viniciusguigo/kairos_minerl_basalt.
On games and simulators as a platform for development of artificial intelligence for command and control
Oct 21, 2021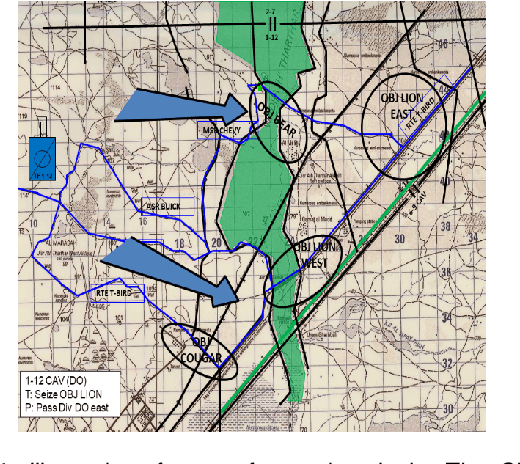
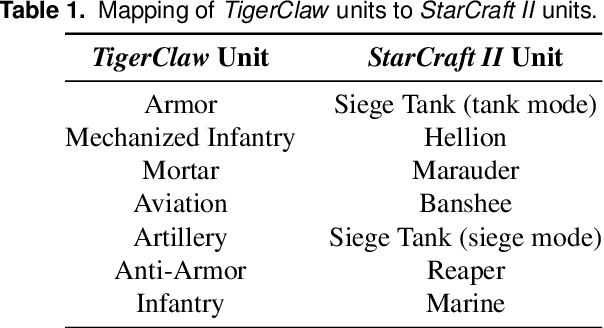
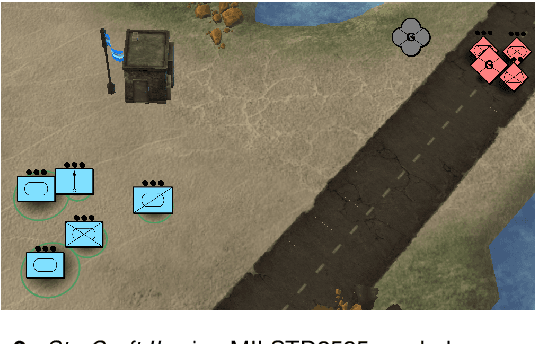

Games and simulators can be a valuable platform to execute complex multi-agent, multiplayer, imperfect information scenarios with significant parallels to military applications: multiple participants manage resources and make decisions that command assets to secure specific areas of a map or neutralize opposing forces. These characteristics have attracted the artificial intelligence (AI) community by supporting development of algorithms with complex benchmarks and the capability to rapidly iterate over new ideas. The success of artificial intelligence algorithms in real-time strategy games such as StarCraft II have also attracted the attention of the military research community aiming to explore similar techniques in military counterpart scenarios. Aiming to bridge the connection between games and military applications, this work discusses past and current efforts on how games and simulators, together with the artificial intelligence algorithms, have been adapted to simulate certain aspects of military missions and how they might impact the future battlefield. This paper also investigates how advances in virtual reality and visual augmentation systems open new possibilities in human interfaces with gaming platforms and their military parallels.
Gaze-Informed Multi-Objective Imitation Learning from Human Demonstrations
Feb 25, 2021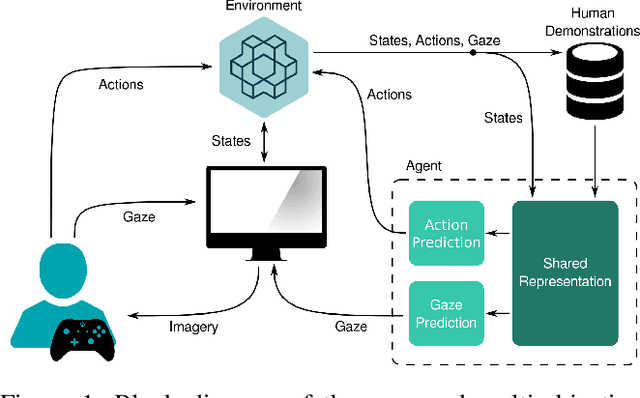
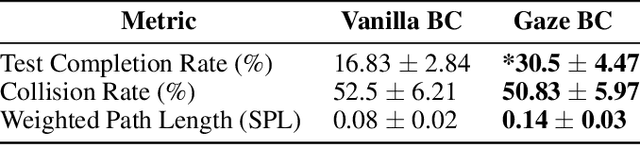
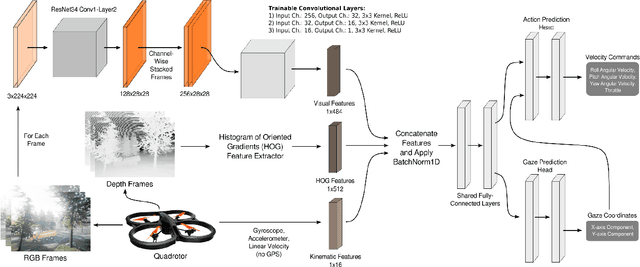
In the field of human-robot interaction, teaching learning agents from human demonstrations via supervised learning has been widely studied and successfully applied to multiple domains such as self-driving cars and robot manipulation. However, the majority of the work on learning from human demonstrations utilizes only behavioral information from the demonstrator, i.e. what actions were taken, and ignores other useful information. In particular, eye gaze information can give valuable insight towards where the demonstrator is allocating their visual attention, and leveraging such information has the potential to improve agent performance. Previous approaches have only studied the utilization of attention in simple, synchronous environments, limiting their applicability to real-world domains. This work proposes a novel imitation learning architecture to learn concurrently from human action demonstration and eye tracking data to solve tasks where human gaze information provides important context. The proposed method is applied to a visual navigation task, in which an unmanned quadrotor is trained to search for and navigate to a target vehicle in a real-world, photorealistic simulated environment. When compared to a baseline imitation learning architecture, results show that the proposed gaze augmented imitation learning model is able to learn policies that achieve significantly higher task completion rates, with more efficient paths, while simultaneously learning to predict human visual attention. This research aims to highlight the importance of multimodal learning of visual attention information from additional human input modalities and encourages the community to adopt them when training agents from human demonstrations to perform visuomotor tasks.
Human-in-the-Loop Methods for Data-Driven and Reinforcement Learning Systems
Aug 30, 2020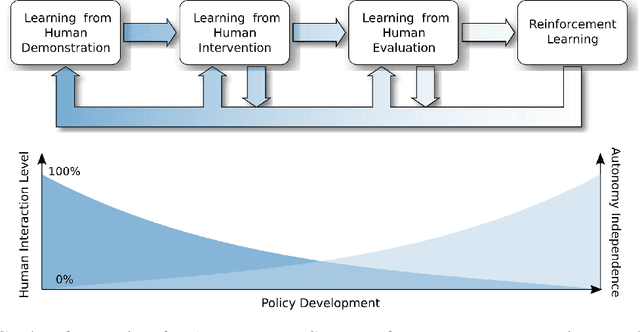
Recent successes combine reinforcement learning algorithms and deep neural networks, despite reinforcement learning not being widely applied to robotics and real world scenarios. This can be attributed to the fact that current state-of-the-art, end-to-end reinforcement learning approaches still require thousands or millions of data samples to converge to a satisfactory policy and are subject to catastrophic failures during training. Conversely, in real world scenarios and after just a few data samples, humans are able to either provide demonstrations of the task, intervene to prevent catastrophic actions, or simply evaluate if the policy is performing correctly. This research investigates how to integrate these human interaction modalities to the reinforcement learning loop, increasing sample efficiency and enabling real-time reinforcement learning in robotics and real world scenarios. This novel theoretical foundation is called Cycle-of-Learning, a reference to how different human interaction modalities, namely, task demonstration, intervention, and evaluation, are cycled and combined to reinforcement learning algorithms. Results presented in this work show that the reward signal that is learned based upon human interaction accelerates the rate of learning of reinforcement learning algorithms and that learning from a combination of human demonstrations and interventions is faster and more sample efficient when compared to traditional supervised learning algorithms. Finally, Cycle-of-Learning develops an effective transition between policies learned using human demonstrations and interventions to reinforcement learning. The theoretical foundation developed by this research opens new research paths to human-agent teaming scenarios where autonomous agents are able to learn from human teammates and adapt to mission performance metrics in real-time and in real world scenarios.
Combining Visible and Infrared Spectrum Imagery using Machine Learning for Small Unmanned Aerial System Detection
Apr 02, 2020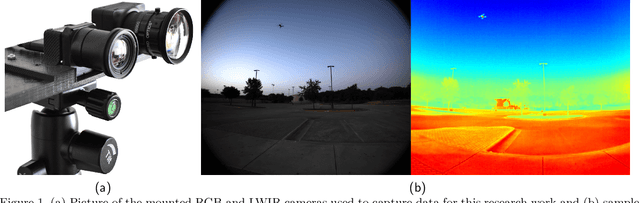
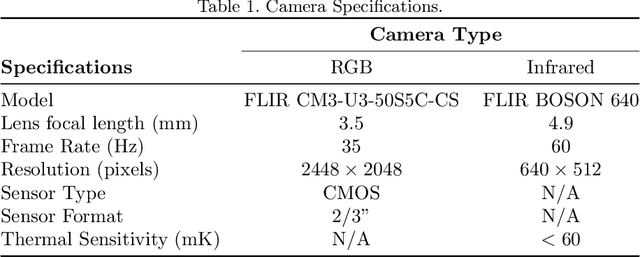

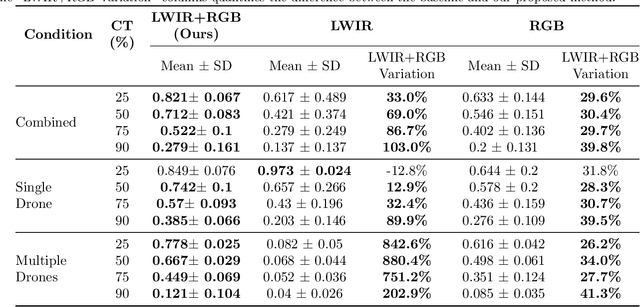
Advances in machine learning and deep neural networks for object detection, coupled with lower cost and power requirements of cameras, led to promising vision-based solutions for sUAS detection. However, solely relying on the visible spectrum has previously led to reliability issues in low contrast scenarios such as sUAS flying below the treeline and against bright sources of light. Alternatively, due to the relatively high heat signatures emitted from sUAS during flight, a long-wave infrared (LWIR) sensor is able to produce images that clearly contrast the sUAS from its background. However, compared to widely available visible spectrum sensors, LWIR sensors have lower resolution and may produce more false positives when exposed to birds or other heat sources. This research work proposes combining the advantages of the LWIR and visible spectrum sensors using machine learning for vision-based detection of sUAS. Utilizing the heightened background contrast from the LWIR sensor combined and synchronized with the relatively increased resolution of the visible spectrum sensor, a deep learning model was trained to detect the sUAS through previously difficult environments. More specifically, the approach demonstrated effective detection of multiple sUAS flying above and below the treeline, in the presence of heat sources, and glare from the sun. Our approach achieved a detection rate of 71.2 +- 8.3%, improving by 69% when compared to LWIR and by 30.4% when visible spectrum alone, and achieved false alarm rate of 2.7 +- 2.6%, decreasing by 74.1% and by 47.1% when compared to LWIR and visible spectrum alone, respectively, on average, for single and multiple drone scenarios, controlled for the same confidence metric of the machine learning object detector of at least 50%. Videos of the solution's performance can be seen at https://sites.google.com/view/tamudrone-spie2020/.
PODNet: A Neural Network for Discovery of Plannable Options
Nov 15, 2019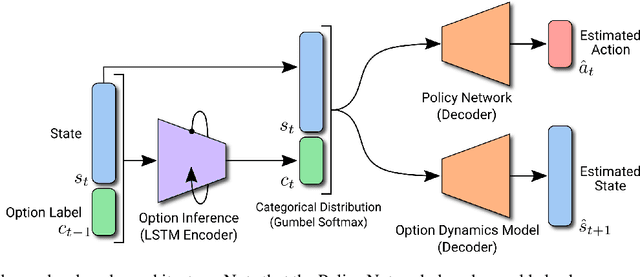
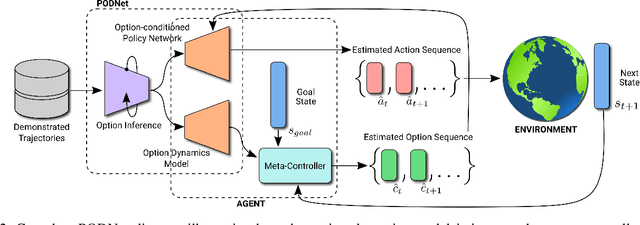
Learning from demonstration has been widely studied in machine learning but becomes challenging when the demonstrated trajectories are unstructured and follow different objectives. This short-paper proposes PODNet, Plannable Option Discovery Network, addressing how to segment an unstructured set of demonstrated trajectories for option discovery. This enables learning from demonstration to perform multiple tasks and plan high-level trajectories based on the discovered option labels. PODNet combines a custom categorical variational autoencoder, a recurrent option inference network, option-conditioned policy network, and option dynamics model in an end-to-end learning architecture. Due to the concurrently trained option-conditioned policy network and option dynamics model, the proposed architecture has implications in multi-task and hierarchical learning, explainable and interpretable artificial intelligence, and applications where the agent is required to learn only from observations.
Integrating Behavior Cloning and Reinforcement Learning for Improved Performance in Sparse Reward Environments
Oct 09, 2019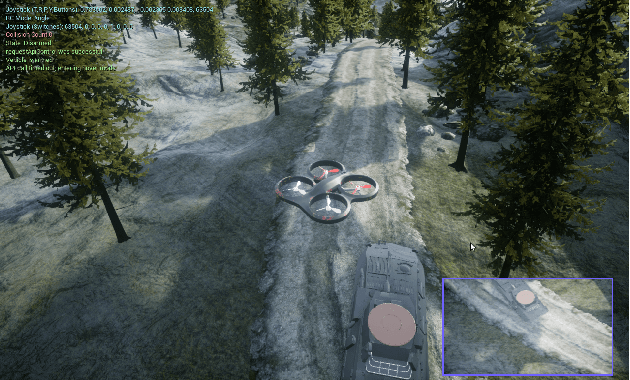
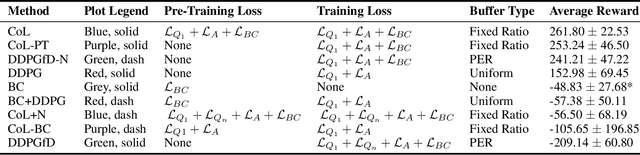
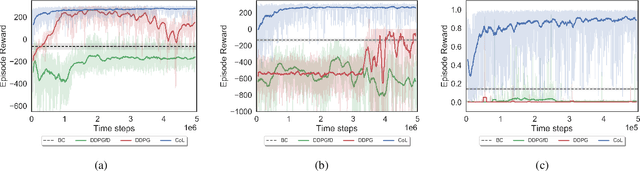
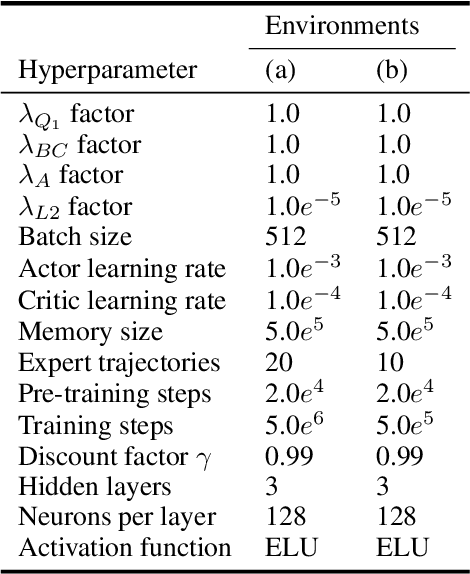
This paper investigates how to efficiently transition and update policies, trained initially with demonstrations, using off-policy actor-critic reinforcement learning. It is well-known that techniques based on Learning from Demonstrations, for example behavior cloning, can lead to proficient policies given limited data. However, it is currently unclear how to efficiently update that policy using reinforcement learning as these approaches are inherently optimizing different objective functions. Previous works have used loss functions which combine behavioral cloning losses with reinforcement learning losses to enable this update, however, the components of these loss functions are often set anecdotally, and their individual contributions are not well understood. In this work we propose the Cycle-of-Learning (CoL) framework that uses an actor-critic architecture with a loss function that combines behavior cloning and 1-step Q-learning losses with an off-policy pre-training step from human demonstrations. This enables transition from behavior cloning to reinforcement learning without performance degradation and improves reinforcement learning in terms of overall performance and training time. Additionally, we carefully study the composition of these combined losses and their impact on overall policy learning. We show that our approach outperforms state-of-the-art techniques for combining behavior cloning and reinforcement learning for both dense and sparse reward scenarios. Our results also suggest that directly including the behavior cloning loss on demonstration data helps to ensure stable learning and ground future policy updates.
Efficiently Combining Human Demonstrations and Interventions for Safe Training of Autonomous Systems in Real-Time
Nov 28, 2018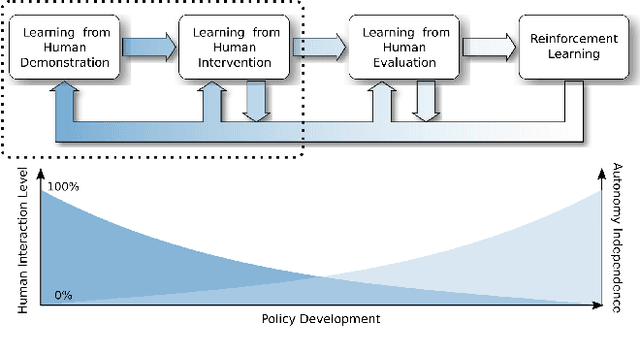
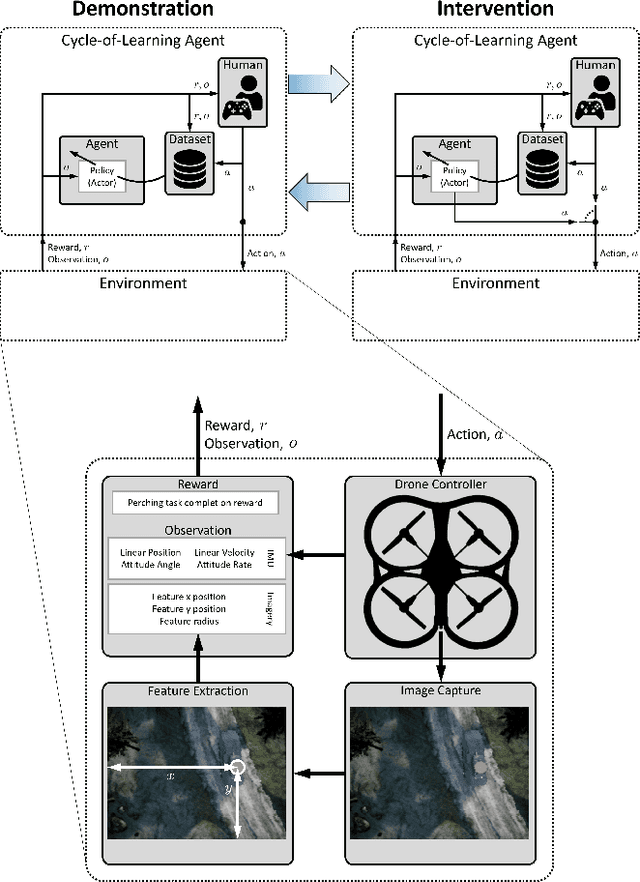
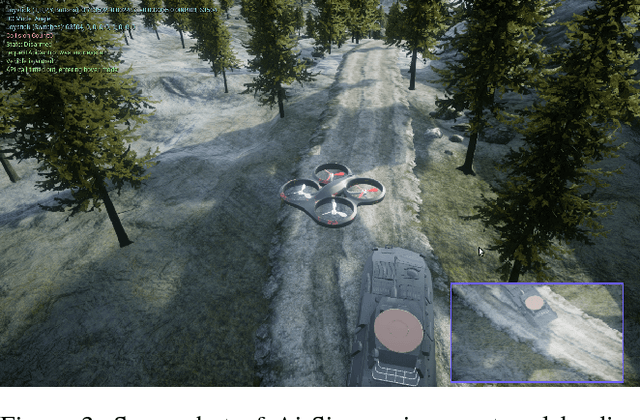
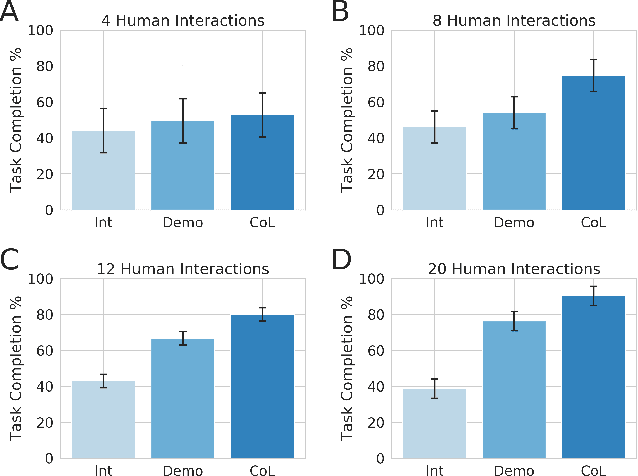
This paper investigates how to utilize different forms of human interaction to safely train autonomous systems in real-time by learning from both human demonstrations and interventions. We implement two components of the Cycle-of-Learning for Autonomous Systems, which is our framework for combining multiple modalities of human interaction. The current effort employs human demonstrations to teach a desired behavior via imitation learning, then leverages intervention data to correct for undesired behaviors produced by the imitation learner to teach novel tasks to an autonomous agent safely, after only minutes of training. We demonstrate this method in an autonomous perching task using a quadrotor with continuous roll, pitch, yaw, and throttle commands and imagery captured from a downward-facing camera in a high-fidelity simulated environment. Our method improves task completion performance for the same amount of human interaction when compared to learning from demonstrations alone, while also requiring on average 32% less data to achieve that performance. This provides evidence that combining multiple modes of human interaction can increase both the training speed and overall performance of policies for autonomous systems.
Cycle-of-Learning for Autonomous Systems from Human Interaction
Oct 09, 2018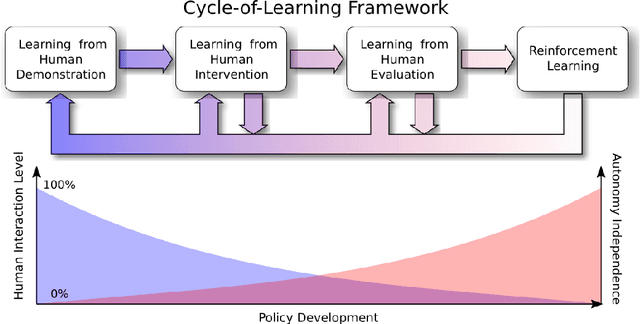
We discuss different types of human-robot interaction paradigms in the context of training end-to-end reinforcement learning algorithms. We provide a taxonomy to categorize the types of human interaction and present our Cycle-of-Learning framework for autonomous systems that combines different human-interaction modalities with reinforcement learning. Two key concepts provided by our Cycle-of-Learning framework are how it handles the integration of the different human-interaction modalities (demonstration, intervention, and evaluation) and how to define the switching criteria between them.