 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Cell Must Go On: Agar.io for Continual Reinforcement Learning
May 23, 2025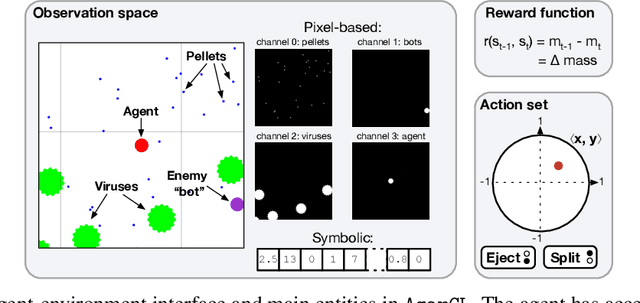

Continual reinforcement learning (RL) concerns agents that are expected to learn continually, rather than converge to a policy that is then fixed for evaluation. Such an approach is well suited to environments the agent perceives as changing, which renders any static policy ineffective over time. The few simulators explicitly designed for empirical research in continual RL are often limited in scope or complexity, and it is now common for researchers to modify episodic RL environments by artificially incorporating abrupt task changes during interaction. In this paper, we introduce AgarCL, a research platform for continual RL that allows for a progression of increasingly sophisticated behaviour. AgarCL is based on the game Agar.io, a non-episodic, high-dimensional problem featuring stochastic, ever-evolving dynamics, continuous actions, and partial observability. Additionally, we provide benchmark results reporting the performance of DQN, PPO, and SAC in both the primary, challenging continual RL problem, and across a suite of smaller tasks within AgarCL, each of which isolates aspects of the full environment and allow us to characterize the challenges posed by different aspects of the game.
SwarmGPT-Primitive: A Language-Driven Choreographer for Drone Swarms Using Safe Motion Primitive Composition
Dec 11, 2024Catalyzed by advancements in hardware and software, drone performances are increasingly making their mark in the entertainment industry. However, designing smooth and safe choreographies for drone swarms is complex and often requires expert domain knowledge. In this work, we introduce SwarmGPT-Primitive, a language-based choreographer that integrates the reasoning capabilities of large language models (LLMs) with safe motion planning to facilitate deployable drone swarm choreographies. The LLM composes choreographies for a given piece of music by utilizing a library of motion primitives; the language-based choreographer is augmented with an optimization-based safety filter, which certifies the choreography for real-world deployment by making minimal adjustments when feasibility and safety constraints are violated. The overall SwarmGPT-Primitive framework decouples choreographic design from safe motion planning, which allows non-expert users to re-prompt and refine compositions without concerns about compliance with constraints such as avoiding collisions or downwash effects or satisfying actuation limits. We demonstrate our approach through simulations and experiments with swarms of up to 20 drones performing choreographies designed based on various songs, highlighting the system's ability to generate effective and synchronized drone choreographies for real-world deployment.