 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Gaze Control System for Accurate Real-time Spin Estimation in Professional Ball Games
Jun 25, 2026Spin plays a crucial role in many ball sports due to its effect on the trajectory of the ball. Vision-based estimation of the ball's spin during a game with conventional cameras is challenging due to the ball's small size, high speed, and fast rotation. To address these challenges, we propose an event-based active vision system that can track unmodified balls and measure their spin in real-time. The system consists of an event camera for its high temporal resolution and minimal motion blur, high-speed pan/tilt galvanometer mirrors to keep the ball in the field of view, and a low-latency focus-tunable telephoto lens to increase the spatial resolution on the ball and keep it in focus. To track the ball, we use a hybrid approach that combines 2D event-based detection for centering and 3D positions from a ball localization system for re-initialization. For high-accuracy spin estimation, we propose an offline method that performs contrast maximization on the sphere (s-CMax). This method achieves state-of-the-art accuracy on static balls across multiple sports (table tennis, baseball, tennis, and golf), with mean magnitude and axis errors of 2.1% and 4.0 degrees, respectively. We then develop a low-latency online method for table tennis as a case study in real-time applications. This method uses an uncertainty-aware convolutional neural network trained on pseudo-ground-truth spin labels from the offline approach, combined with a GPU-accelerated batch implementation of contrast maximization for refinement. We demonstrate reliable tracking and spin estimation with a three-view setup during professional table tennis matches, with high accuracy (8.8% magnitude and 6.4 degrees axis mismatch), 3 ms latency, and 750 Hz throughput.
Dense Force Estimation with an Event-based Optical Tactile Sensor
Jun 08, 2026Humans rely on spatially dense, geometry and force-aware tactile feedback at high temporal resolution for dexterous manipulation. While vision-based tactile sensors enable dense force estimation, they are limited by camera frame rates, motion blur, and data bandwidth. Event-based optical tactile sensors offer an attractive alternative with microsecond temporal resolution and low motion blur, but existing methods are restricted to predicting only net forces. We introduce the first framework for dense 3D force field reconstruction using event-based optical tactile sensors. Our approach estimates 3D surface displacements from event data and maps them to forces via the inverse Finite Elements Method (iFEM). Shear displacements are recovered through the proposed event-based marker tracking algorithm, while normal displacements are predicted by a convolutional neural network trained on a collected dataset of synchronized force-displacement-event data. Experiments demonstrate accurate reconstruction of physically grounded forces, achieving a mean absolute error of (0.14 N, 0.10 N, 0.93 N) over force ranges up to (4 N, 4 N, 20 N), while operating at an average of 100 Hz. This work constitutes a first step toward enabling dense force feedback for high-frequency control in robotic grasping and dexterous manipulation.
ES-PTAM: Event-based Stereo Parallel Tracking and Mapping
Aug 28, 2024



Visual Odometry (VO) and SLAM are fundamental components for spatial perception in mobile robots. Despite enormous progress in the field, current VO/SLAM systems are limited by their sensors' capability. Event cameras are novel visual sensors that offer advantages to overcome the limitations of standard cameras, enabling robots to expand their operating range to challenging scenarios, such as high-speed motion and high dynamic range illumination. We propose a novel event-based stereo VO system by combining two ideas: a correspondence-free mapping module that estimates depth by maximizing ray density fusion and a tracking module that estimates camera poses by maximizing edge-map alignment. We evaluate the system comprehensively on five real-world datasets, spanning a variety of camera types (manufacturers and spatial resolutions) and scenarios (driving, flying drone, hand-held, egocentric, etc). The quantitative and qualitative results demonstrate that our method outperforms the state of the art in majority of the test sequences by a margin, e.g., trajectory error reduction of 45% on RPG dataset, 61% on DSEC dataset, and 21% on TUM-VIE dataset. To benefit the community and foster research on event-based perception systems, we release the source code and results: https://github.com/tub-rip/ES-PTAM
* 17 pages, 7 figures, 4 tables, https://github.com/tub-rip/ES-PTAM
Dynamic-Aware Autonomous Exploration in Populated Environments
Apr 06, 2021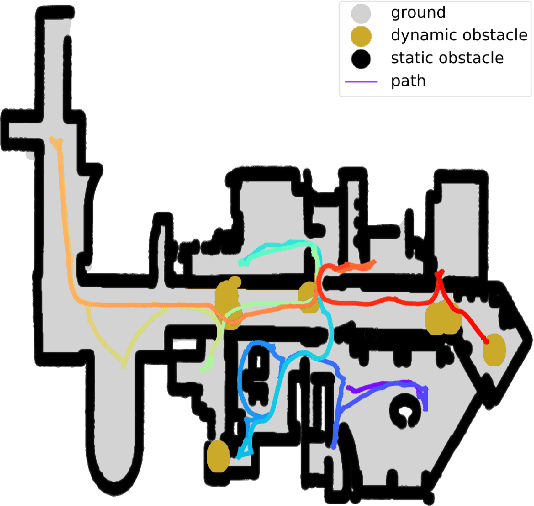

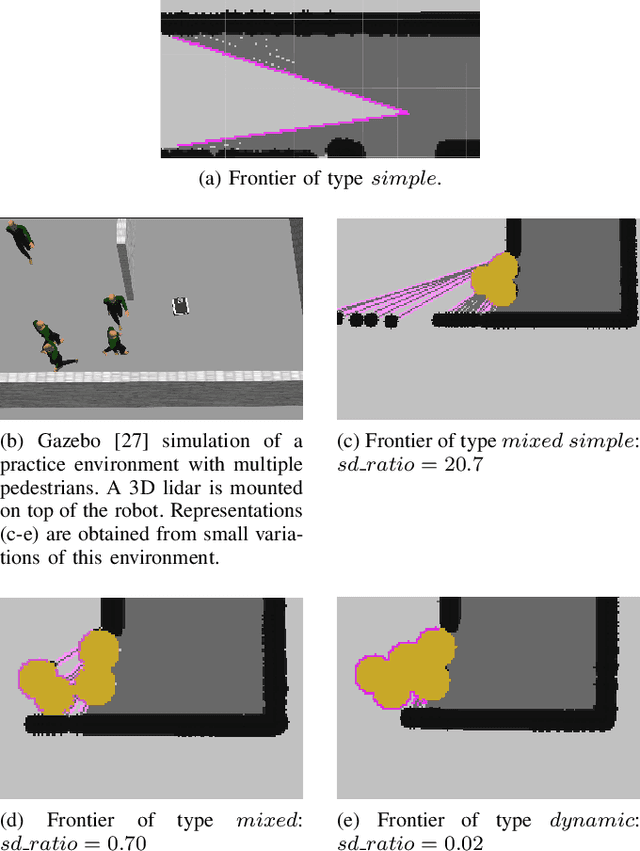
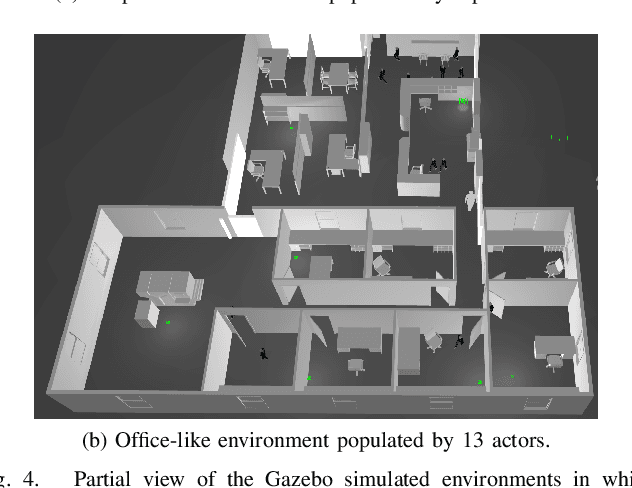
Autonomous exploration allows mobile robots to navigate in initially unknown territories in order to build complete representations of the environments. In many real-life applications, environments often contain dynamic obstacles which can compromise the exploration process by temporarily blocking passages, narrow paths, exits or entrances to other areas yet to be explored. In this work, we formulate a novel exploration strategy capable of explicitly handling dynamic obstacles, thus leading to complete and reliable exploration outcomes in populated environments. We introduce the concept of dynamic frontiers to represent unknown regions at the boundaries with dynamic obstacles together with a cost function which allows the robot to make informed decisions about when to revisit such frontiers. We evaluate the proposed strategy in challenging simulated environments and show that it outperforms a state-of-the-art baseline in these populated scenarios.