 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Hardness of Optimal Motion on Trees
Jun 04, 2026This paper presents a simple framework that settles the complexity of Multi-Agent Path Finding (MAPF) on trees across standard objectives--distance, makespan, and flowtime--for both labeled and colored variants. In MAPF, agents occupy the vertices of a graph and must move to target vertices without collisions while optimizing a given objective. In the labeled case, the agents are distinct and have respective targets; in the colored case, agents of the same color are interchangeable. While many MAPF variants are known to be intractable, several basic cases on trees have remained open. We prove NP-hardness on trees for both labeled and 2-colored MAPF under all three objectives. In particular, we resolve the classical Pebble Motion problem, where one pebble moves at a time to an adjacent empty vertex and the goal is to minimize the total number of moves. Despite being one of the most basic discrete motion models, its complexity on trees had remained open for several decades. Moreover, for colored Pebble Motion, we give the first hardness result on any graph class, already with two colors, which is tight. All of these results are established through the hardness of Stack Rearrangement, itself posed as an open problem, which asks to optimally rearrange items stored in stacks, and which we also prove to be NP-hard. Notably, the connection to stacks yields hardness already on very simple trees--subdivided stars--across all problems. Together, these results reveal a common tractability barrier that permeates several fundamental motion models, thereby unifying and strengthening prior hardness results.
Robust Out-of-Order Retrieval for Grid-Based Storage at Maximum Capacity
Jan 27, 2026This paper proposes a framework for improving the operational efficiency of automated storage systems under uncertainty. It considers a 2D grid-based storage for uniform-sized loads (e.g., containers, pallets, or totes), which are moved by a robot (or other manipulator) along a collision-free path in the grid. The loads are labeled (i.e., unique) and must be stored in a given sequence, and later be retrieved in a different sequence -- an operational pattern that arises in logistics applications, such as last-mile distribution centers and shipyards. The objective is to minimize the load relocations to ensure efficient retrieval. A previous result guarantees a zero-relocation solution for known storage and retrieval sequences, even for storage at full capacity, provided that the side of the grid through which loads are stored/retrieved is at least 3 cells wide. However, in practice, the retrieval sequence can change after the storage phase. To address such uncertainty, this work investigates \emph{$k$-bounded perturbations} during retrieval, under which any two loads may depart out of order if they are originally at most $k$ positions apart. We prove that a $Θ(k)$ grid width is necessary and sufficient for eliminating relocations at maximum capacity. We also provide an efficient solver for computing a storage arrangement that is robust to such perturbations. To address the higher-uncertainty case where perturbations exceed $k$, a strategy is introduced to effectively minimize relocations. Extensive experiments show that, for $k$ up to half the grid width, the proposed storage-retrieval framework essentially eliminates relocations. For $k$ values up to the full grid width, relocations are reduced by $50\%+$.
Fully Packed and Ready to Go: High-Density, Rearrangement-Free, Grid-Based Storage and Retrieval
May 28, 2025Grid-based storage systems with uniformly shaped loads (e.g., containers, pallets, totes) are commonplace in logistics, industrial, and transportation domains. A key performance metric for such systems is the maximization of space utilization, which requires some loads to be placed behind or below others, preventing direct access to them. Consequently, dense storage settings bring up the challenge of determining how to place loads while minimizing costly rearrangement efforts necessary during retrieval. This paper considers the setting involving an inbound phase, during which loads arrive, followed by an outbound phase, during which loads depart. The setting is prevalent in distribution centers, automated parking garages, and container ports. In both phases, minimizing the number of rearrangement actions results in more optimal (e.g., fast, energy-efficient, etc.) operations. In contrast to previous work focusing on stack-based systems, this effort examines the case where loads can be freely moved along the grid, e.g., by a mobile robot, expanding the range of possible motions. We establish that for a range of scenarios, such as having limited prior knowledge of the loads' arrival sequences or grids with a narrow opening, a (best possible) rearrangement-free solution always exists, including when the loads fill the grid to its capacity. In particular, when the sequences are fully known, we establish an intriguing characterization showing that rearrangement can always be avoided if and only if the open side of the grid (used to access the storage) is at least 3 cells wide. We further discuss useful practical implications of our solutions.
Fine-Grained Complexity Analysis of Multi-Agent Path Finding on 2D Grids
May 25, 2023



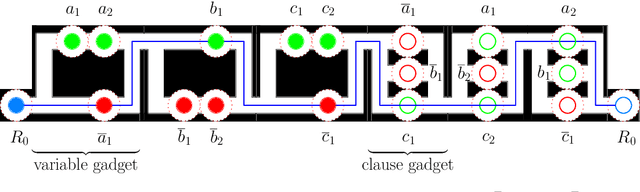
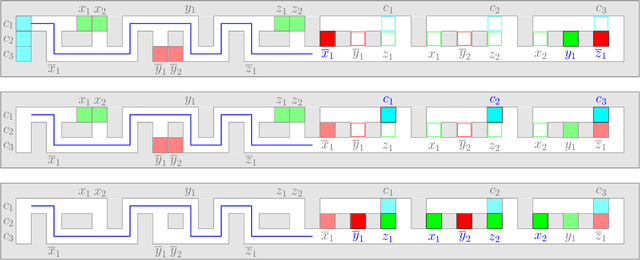
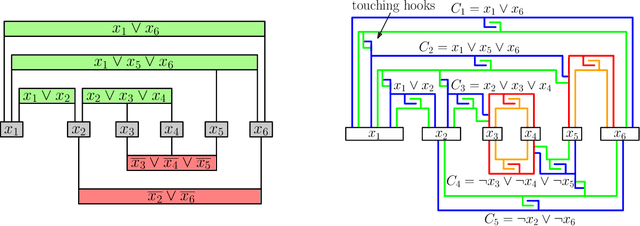
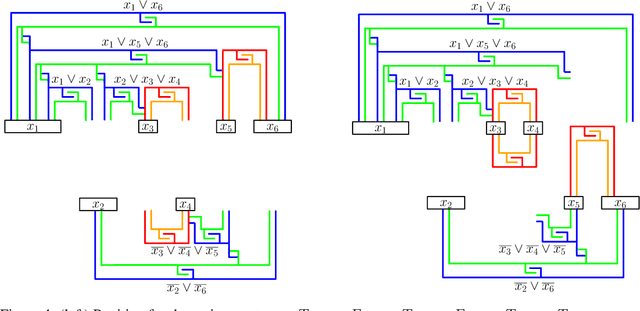
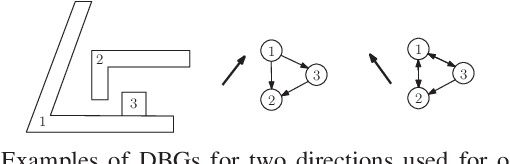
Multi-Agent Path Finding (MAPF) is a fundamental motion coordination problem arising in multi-agent systems with a wide range of applications. The problem's intractability has led to extensive research on improving the scalability of solvers for it. Since optimal solvers can struggle to scale, a major challenge that arises is understanding what makes MAPF hard. We tackle this challenge through a fine-grained complexity analysis of time-optimal MAPF on 2D grids, thereby closing two gaps and identifying a new tractability frontier. First, we show that 2-colored MAPF, i.e., where the agents are divided into two teams, each with its own set of targets, remains NP-hard. Second, for the flowtime objective (also called sum-of-costs), we show that it remains NP-hard to find a solution in which agents have an individually optimal cost, which we call an individually optimal solution. The previously tightest results for these MAPF variants are for (non-grid) planar graphs. We use a single hardness construction that replaces, strengthens, and unifies previous proofs. We believe that it is also simpler than previous proofs for the planar case as it employs minimal gadgets that enable its full visualization in one figure. Finally, for the flowtime objective, we establish a tractability frontier based on the number of directions agents can move in. Namely, we complement our hardness result, which holds for three directions, with an efficient algorithm for finding an individually optimal solution if only two directions are allowed. This result sheds new light on the structure of optimal solutions, which may help guide algorithm design for the general problem.
Coordination of Multiple Robots along Given Paths with Bounded Junction Complexity
Mar 01, 2023We study a fundamental NP-hard motion coordination problem for multi-robot/multi-agent systems: We are given a graph $G$ and set of agents, where each agent has a given directed path in $G$. Each agent is initially located on the first vertex of its path. At each time step an agent can move to the next vertex on its path, provided that the vertex is not occupied by another agent. The goal is to find a sequence of such moves along the given paths so that each reaches its target, or to report that no such sequence exists. The problem models guidepath-based transport systems, which is a pertinent abstraction for traffic in a variety of contemporary applications, ranging from train networks or Automated Guided Vehicles (AGVs) in factories, through computer game animations, to qubit transport in quantum computing. It also arises as a sub-problem in the more general multi-robot motion-planning problem. We provide a fine-grained tractability analysis of the problem by considering new assumptions and identifying minimal values of key parameters for which the problem remains NP-hard. Our analysis identifies a critical parameter called vertex multiplicity (VM), defined as the maximum number of paths passing through the same vertex. We show that a prevalent variant of the problem, which is equivalent to Sequential Resource Allocation (concerning deadlock prevention for concurrent processes), is NP-hard even when VM is 3. On the positive side, for VM $\le$ 2 we give an efficient algorithm that iteratively resolves cycles of blocking relations among agents. We also present a variant that is NP-hard when the VM is 2 even when $G$ is a 2D grid and each path lies in a single grid row or column. By studying highly distilled yet NP-hard variants, we deepen the understanding of what makes the problem intractable and thereby guide the search for efficient solutions under practical assumptions.
Multi-Robot Motion Planning for Unit Discs with Revolving Areas
Sep 30, 2022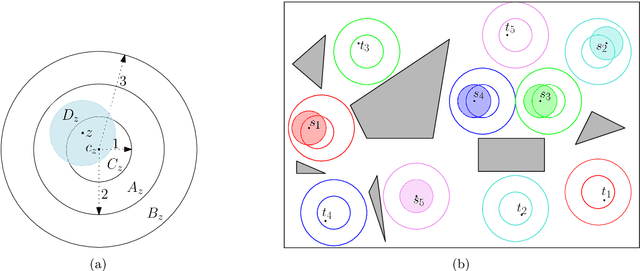
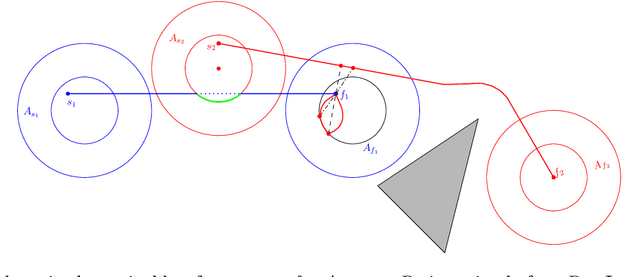
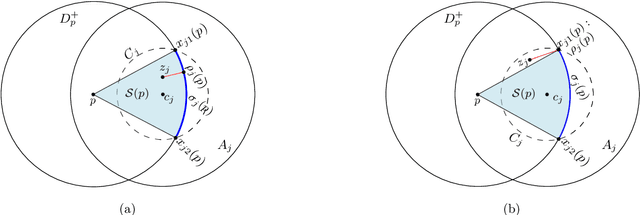
We study the problem of motion planning for a collection of $n$ labeled unit disc robots in a polygonal environment. We assume that the robots have \emph{revolving areas} around their start and final positions: that each start and each final is contained in a radius $2$ disc lying in the free space, not necessarily concentric with the start or final position, which is free from other start or final positions. This assumption allows a \emph{weakly-monotone} motion plan, in which robots move according to an ordering as follows: during the turn of a robot $R$ in the ordering, it moves fully from its start to final position, while other robots do not leave their revolving areas. As $R$ passes through a revolving area, a robot $R'$ that is inside this area may move within the revolving area to avoid a collision. Notwithstanding the existence of a motion plan, we show that minimizing the total traveled distance in this setting, specifically even when the motion plan is restricted to be weakly-monotone, is APX-hard, ruling out any polynomial-time $(1+\epsilon)$-approximation algorithm. On the positive side, we present the first constant-factor approximation algorithm for computing a feasible weakly-monotone motion plan. The total distance traveled by the robots is within an $O(1)$ factor of that of the optimal motion plan, which need not be weakly monotone. Our algorithm extends to an online setting in which the polygonal environment is fixed but the initial and final positions of robots are specified in an online manner. Finally, we observe that the overhead in the overall cost that we add while editing the paths to avoid robot-robot collision can vary significantly depending on the ordering we chose. Finding the best ordering in this respect is known to be NP-hard, and we provide a polynomial time $O(\log n \log \log n)$-approximation algorithm for this problem.
Refined Hardness of Distance-Optimal Multi-Agent Path Finding
Mar 14, 2022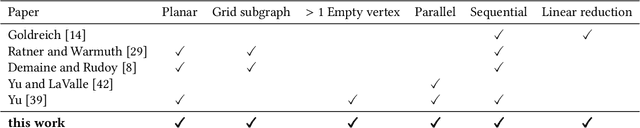


We study the computational complexity of multi-agent path finding (MAPF). Given a graph $G$ and a set of agents, each having a start and target vertex, the goal is to find collision-free paths minimizing the total distance traveled. To better understand the source of difficulty of the problem, we aim to study the simplest and least constrained graph class for which it remains hard. To this end, we restrict $G$ to be a 2D grid, which is a ubiquitous abstraction, as it conveniently allows for modeling well-structured environments (e.g., warehouses). Previous hardness results considered highly constrained 2D grids having only one vertex unoccupied by an agent, while the most restricted hardness result that allowed multiple empty vertices was for (non-grid) planar graphs. We therefore refine previous results by simultaneously considering both 2D grids and multiple empty vertices. We show that even in this case distance-optimal MAPF remains NP-hard, which settles an open problem posed by Banfi et al. (2017). We present a reduction directly from 3-SAT using simple gadgets, making our proof arguably more informative than previous work in terms of potential progress towards positive results. Furthermore, our reduction is the first linear one for the case where $G$ is planar, appearing nearly four decades after the first related result. This allows us to go a step further and exploit the Exponential Time Hypothesis (ETH) to obtain an exponential lower bound for the running time of the problem. Finally, as a stepping stone towards our main results, we prove the NP-hardness of the monotone case, in which agents move one by one with no intermediate stops.
On the Complexity of a Family of Decoupled Multi-Robot Motion Planning Problems
Apr 14, 2021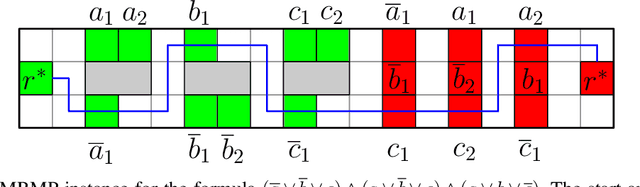
In multi-robot motion planning (MRMP) the aim is to plan the motion of several robots operating in a common workspace, while avoiding collisions with obstacles or with fellow robots. The main contribution of this paper is a simple construction that serves as a lower bound for the computational cost of a variety of prevalent MRMP problems. In particular we show that optimal decoupling of multi-robot motion -- decoupling being a standard approach to practically addressing MRMP -- is NP-hard. The basic problem for which we present our construction is monotone MRMP, a restricted and natural MRMP variant, where robots move one by one to their targets with no intermediate stops. Observing the hardness of these restricted versions of MRMP is significant as it guides the search for efficient solutions towards techniques that can cope with intractable problems. Furthermore, our construction highlights structural properties of difficult instances, such as the need of robots to pass through many start and target positions of other robots. These insights can lead to useful problem relaxations resulting in efficient solutions and to suitable engineering of workspaces.
On Two-Handed Planar Assembly Partitioning
Sep 25, 2020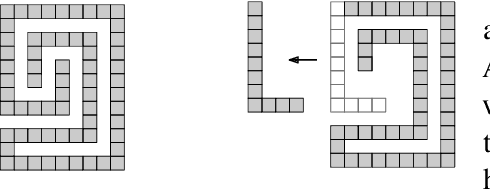
Assembly planning, which is a fundamental problem in robotics and automation, aims to design a sequence of motions that will bring the separate constituent parts of a product into their final placement in the product. It is convenient to study assembly planning in reverse order, where the following key problem, assembly partitioning, arises: Given a set of parts in their final placement in a product, partition them into two sets, each regarded as a rigid body, which we call a subassembly, such that these two subassemblies can be moved sufficiently far away from each other, without colliding with one another. The basic assembly planning problem is further complicated by practical consideration such as how to hold the parts in a subassembly together. Therefore, a desired property of a valid assembly partition is that each of the two subassemblies will be connected. We show that even an utterly simple case of the connected-assembly-partitioning problem is hard: Given a connected set $A$ of unit squares in the plane, each forming a distinct cell of the uniform integer grid, find a subset $S\subset A$ such that $S$ can be rigidly translated to infinity along a prescribed direction without colliding with $A\setminus S$, and both subassemblies $S$ and $A\setminus S$ are each connected. We show that this problem is NP-Complete, and by that settle an open problem posed by Wilson et al. (1995) a quarter of a century ago. We complement the hardness result with two positive results for the aforementioned problem variant of grid squares. First, we show that it is fixed parameter tractable and give an $O(2^k n^2)$-time algorithm, where $n=|A|$ and $k=|S|$. Second, we describe a special case of this variant where a connected partition can always be found in linear time. Each of the positive results sheds further light on the special geometric structure of the problem at hand.
Robust 2D Assembly Sequencing via Geometric Planning with Learned Scores
Sep 20, 2020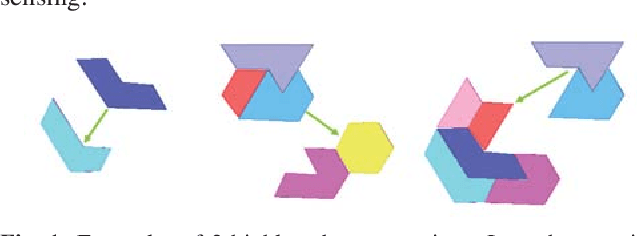
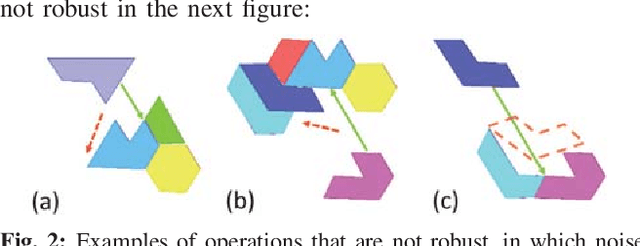
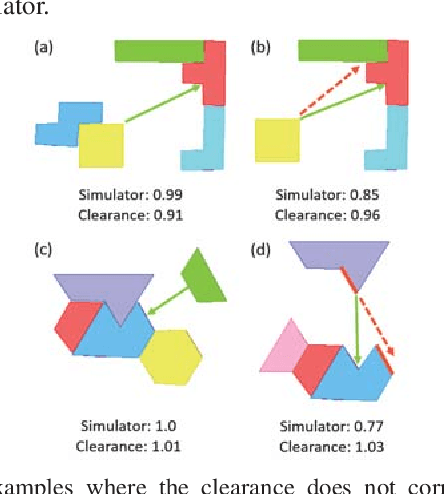
To compute robust 2D assembly plans, we present an approach that combines geometric planning with a deep neural network. We train the network using the Box2D physics simulator with added stochastic noise to yield robustness scores--the success probabilities of planned assembly motions. As running a simulation for every assembly motion is impractical, we train a convolutional neural network to map assembly operations, given as an image pair of the subassemblies before and after they are mated, to a robustness score. The neural network prediction is used within a planner to quickly prune out motions that are not robust. We demonstrate this approach on two-handed planar assemblies, where the motions are one-step translations. Results suggest that the neural network can learn robustness to plan robust sequences an order of magnitude faster than physics simulation.