 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan I see an Example? Active Learning the Long Tail of Attributes and Relations
Mar 11, 2022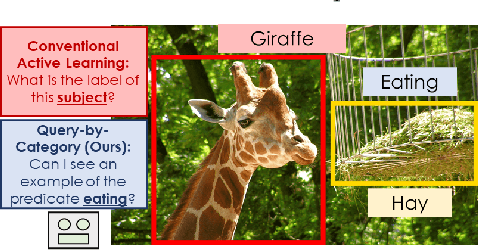
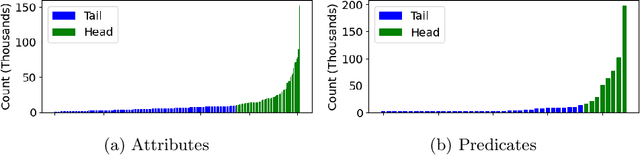
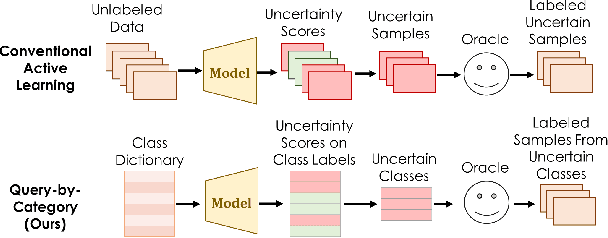
There has been significant progress in creating machine learning models that identify objects in scenes along with their associated attributes and relationships; however, there is a large gap between the best models and human capabilities. One of the major reasons for this gap is the difficulty in collecting sufficient amounts of annotated relations and attributes for training these systems. While some attributes and relations are abundant, the distribution in the natural world and existing datasets is long tailed. In this paper, we address this problem by introducing a novel incremental active learning framework that asks for attributes and relations in visual scenes. While conventional active learning methods ask for labels of specific examples, we flip this framing to allow agents to ask for examples from specific categories. Using this framing, we introduce an active sampling method that asks for examples from the tail of the data distribution and show that it outperforms classical active learning methods on Visual Genome.
Disentangling Transfer and Interference in Multi-Domain Learning
Jul 16, 2021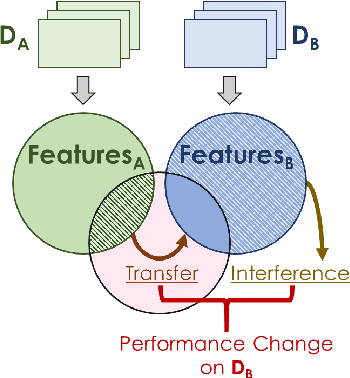
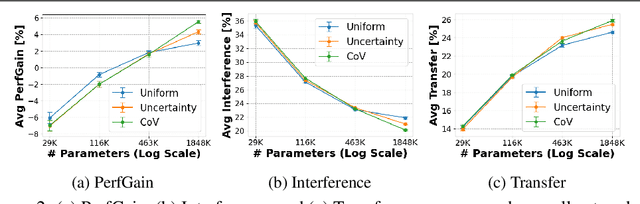
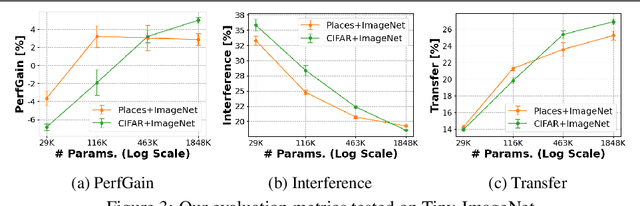
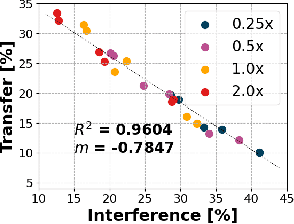
Humans are incredibly good at transferring knowledge from one domain to another, enabling rapid learning of new tasks. Likewise, transfer learning has enabled enormous success in many computer vision problems using pretraining. However, the benefits of transfer in multi-domain learning, where a network learns multiple tasks defined by different datasets, has not been adequately studied. Learning multiple domains could be beneficial or these domains could interfere with each other given limited network capacity. In this work, we decipher the conditions where interference and knowledge transfer occur in multi-domain learning. We propose new metrics disentangling interference and transfer and set up experimental protocols. We further examine the roles of network capacity, task grouping, and dynamic loss weighting in reducing interference and facilitating transfer. We demonstrate our findings on the CIFAR-100, MiniPlaces, and Tiny-ImageNet datasets.
Replay in Deep Learning: Current Approaches and Missing Biological Elements
Apr 01, 2021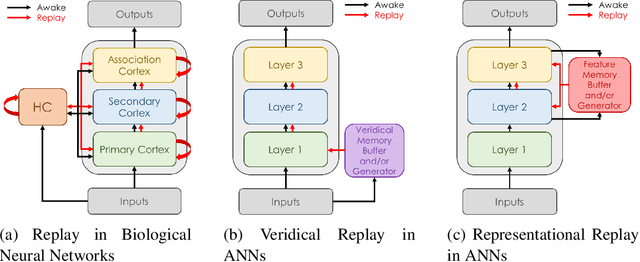
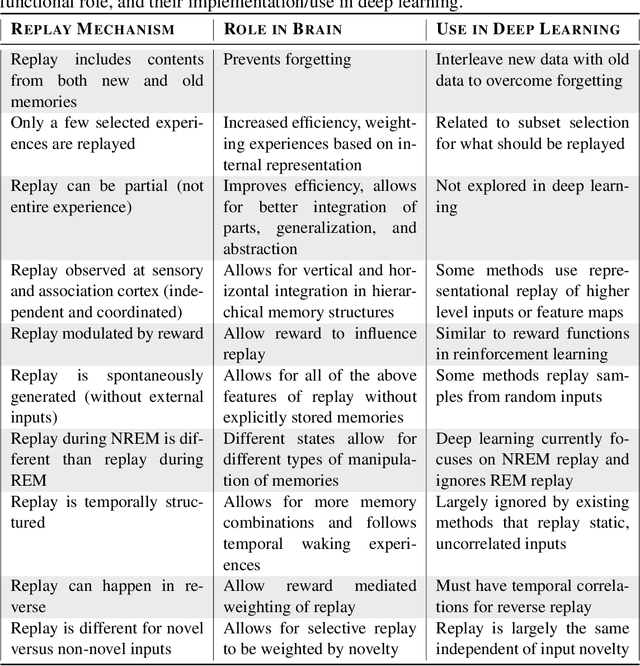
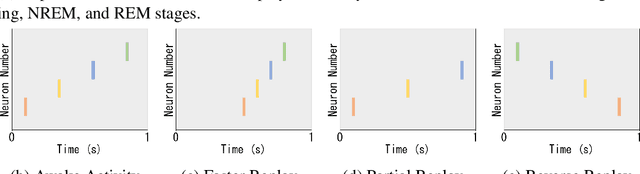
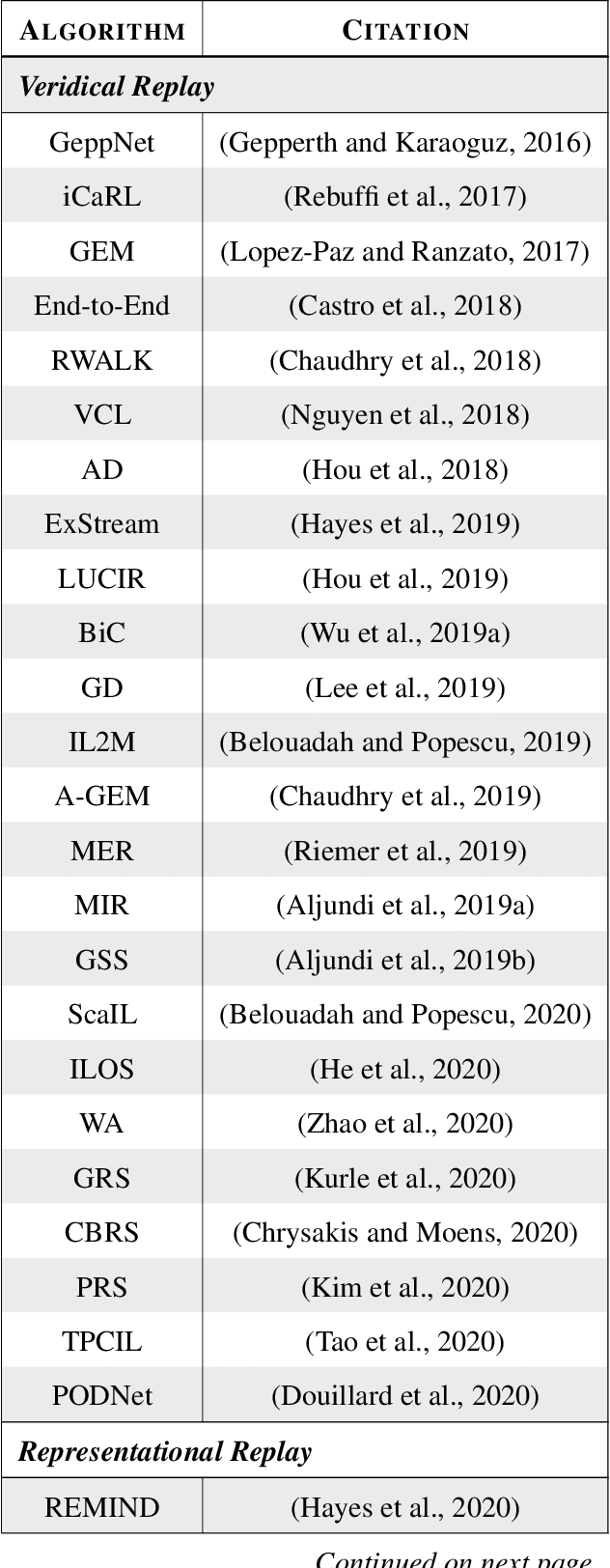
Replay is the reactivation of one or more neural patterns, which are similar to the activation patterns experienced during past waking experiences. Replay was first observed in biological neural networks during sleep, and it is now thought to play a critical role in memory formation, retrieval, and consolidation. Replay-like mechanisms have been incorporated into deep artificial neural networks that learn over time to avoid catastrophic forgetting of previous knowledge. Replay algorithms have been successfully used in a wide range of deep learning methods within supervised, unsupervised, and reinforcement learning paradigms. In this paper, we provide the first comprehensive comparison between replay in the mammalian brain and replay in artificial neural networks. We identify multiple aspects of biological replay that are missing in deep learning systems and hypothesize how they could be utilized to improve artificial neural networks.
Avalanche: an End-to-End Library for Continual Learning
Apr 01, 2021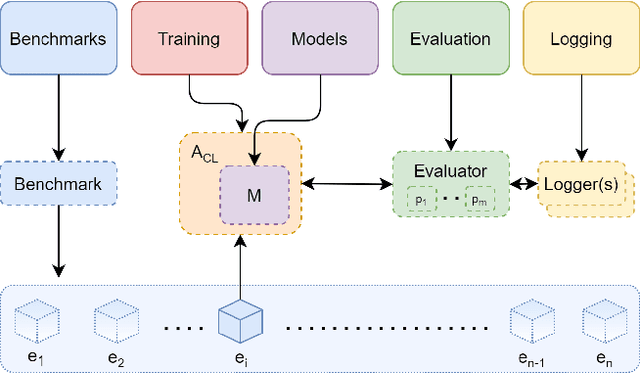
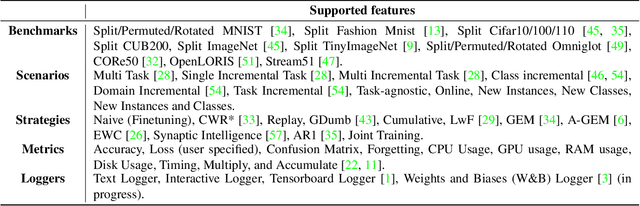
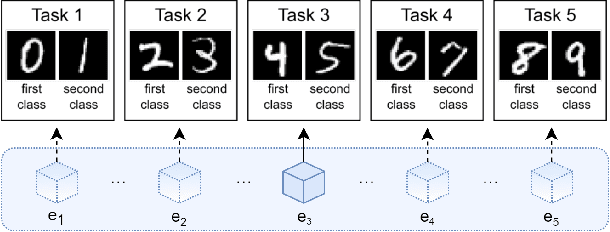
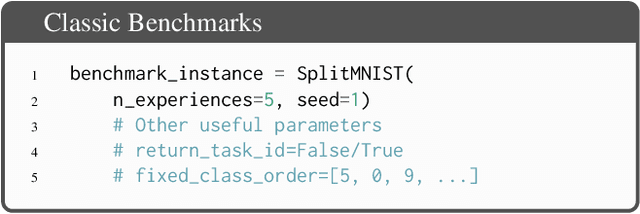
Learning continually from non-stationary data streams is a long-standing goal and a challenging problem in machine learning. Recently, we have witnessed a renewed and fast-growing interest in continual learning, especially within the deep learning community. However, algorithmic solutions are often difficult to re-implement, evaluate and port across different settings, where even results on standard benchmarks are hard to reproduce. In this work, we propose Avalanche, an open-source end-to-end library for continual learning research based on PyTorch. Avalanche is designed to provide a shared and collaborative codebase for fast prototyping, training, and reproducible evaluation of continual learning algorithms.
Self-Supervised Training Enhances Online Continual Learning
Mar 25, 2021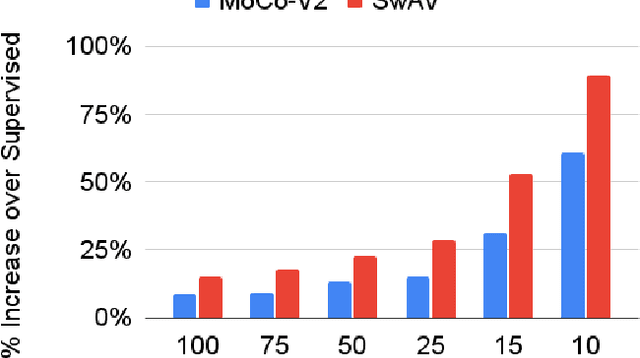
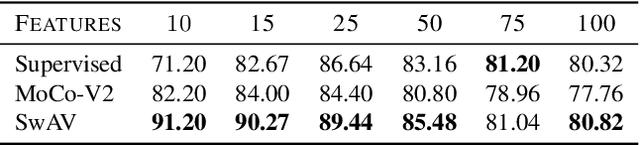
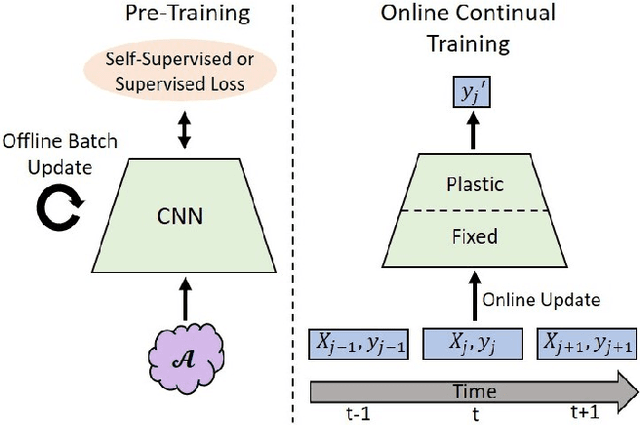
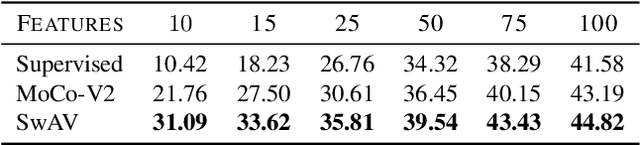
In continual learning, a system must incrementally learn from a non-stationary data stream without catastrophic forgetting. Recently, multiple methods have been devised for incrementally learning classes on large-scale image classification tasks, such as ImageNet. State-of-the-art continual learning methods use an initial supervised pre-training phase, in which the first 10% - 50% of the classes in a dataset are used to learn representations in an offline manner before continual learning of new classes begins. We hypothesize that self-supervised pre-training could yield features that generalize better than supervised learning, especially when the number of samples used for pre-training is small. We test this hypothesis using the self-supervised MoCo-V2 and SwAV algorithms. On ImageNet, we find that both outperform supervised pre-training considerably for online continual learning, and the gains are larger when fewer samples are available. Our findings are consistent across three continual learning algorithms. Our best system achieves a 14.95% relative increase in top-1 accuracy on class incremental ImageNet over the prior state of the art for online continual learning.
Selective Replay Enhances Learning in Online Continual Analogical Reasoning
Mar 06, 2021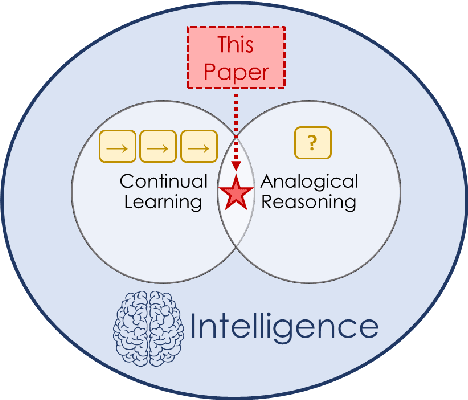
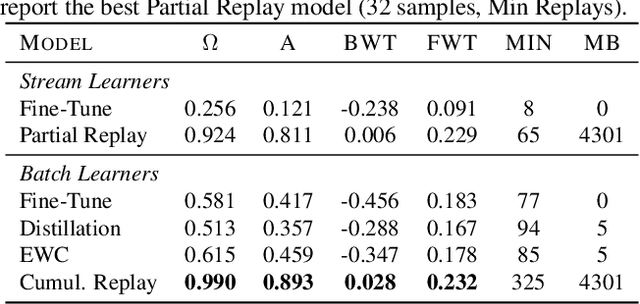
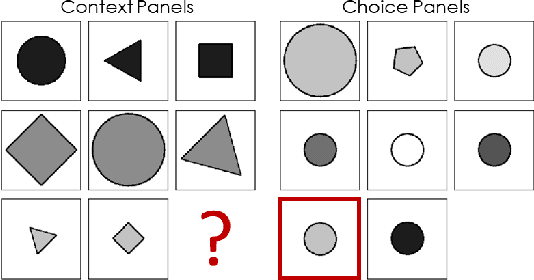
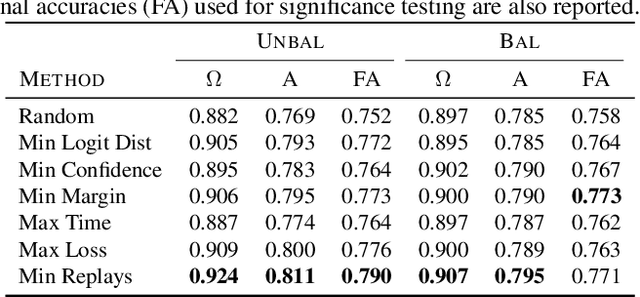
In continual learning, a system learns from non-stationary data streams or batches without catastrophic forgetting. While this problem has been heavily studied in supervised image classification and reinforcement learning, continual learning in neural networks designed for abstract reasoning has not yet been studied. Here, we study continual learning of analogical reasoning. Analogical reasoning tests such as Raven's Progressive Matrices (RPMs) are commonly used to measure non-verbal abstract reasoning in humans, and recently offline neural networks for the RPM problem have been proposed. In this paper, we establish experimental baselines, protocols, and forward and backward transfer metrics to evaluate continual learners on RPMs. We employ experience replay to mitigate catastrophic forgetting. Prior work using replay for image classification tasks has found that selectively choosing the samples to replay offers little, if any, benefit over random selection. In contrast, we find that selective replay can significantly outperform random selection for the RPM task.
Improved Robustness to Open Set Inputs via Tempered Mixup
Sep 10, 2020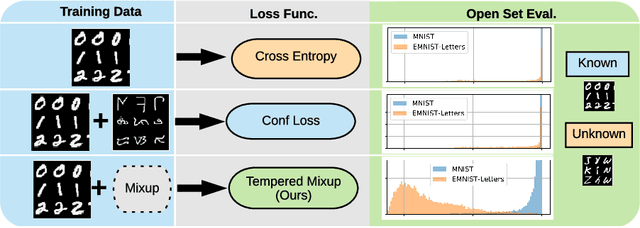
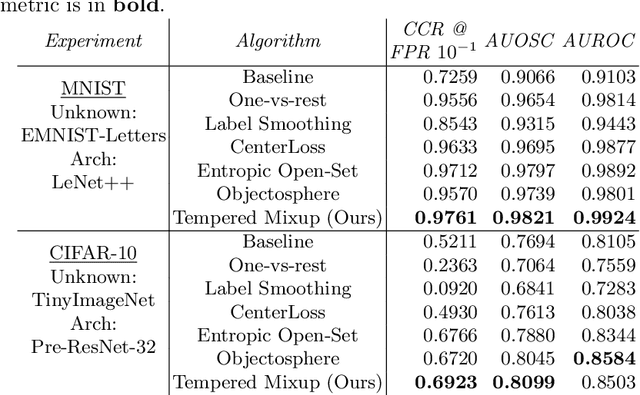
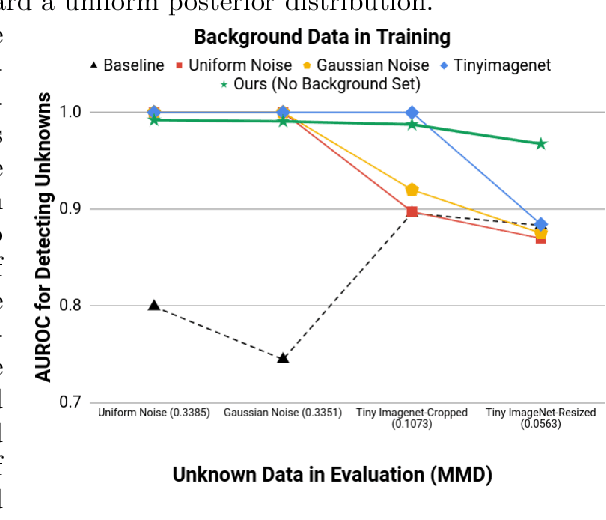
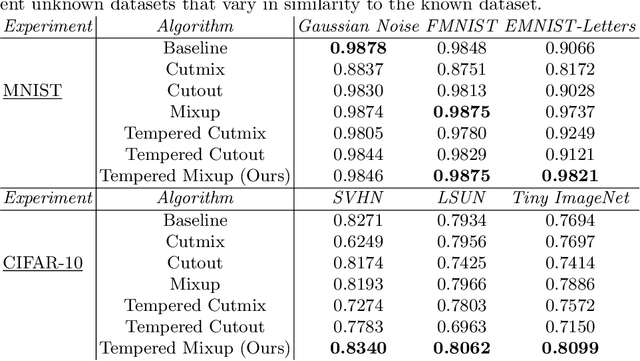
Supervised classification methods often assume that evaluation data is drawn from the same distribution as training data and that all classes are present for training. However, real-world classifiers must handle inputs that are far from the training distribution including samples from unknown classes. Open set robustness refers to the ability to properly label samples from previously unseen categories as novel and avoid high-confidence, incorrect predictions. Existing approaches have focused on either novel inference methods, unique training architectures, or supplementing the training data with additional background samples. Here, we propose a simple regularization technique easily applied to existing convolutional neural network architectures that improves open set robustness without a background dataset. Our method achieves state-of-the-art results on open set classification baselines and easily scales to large-scale open set classification problems.
RODEO: Replay for Online Object Detection
Aug 14, 2020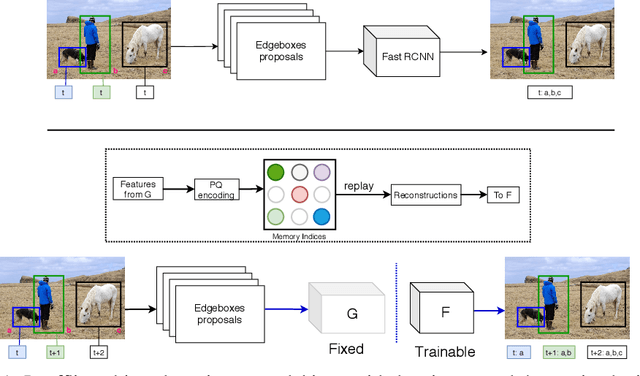
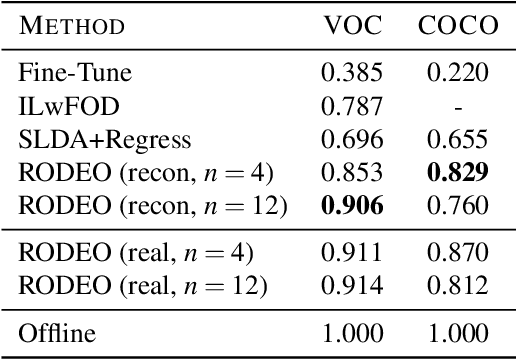
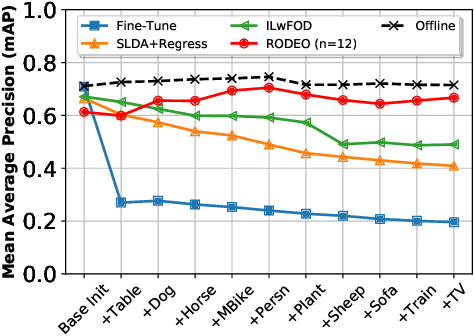
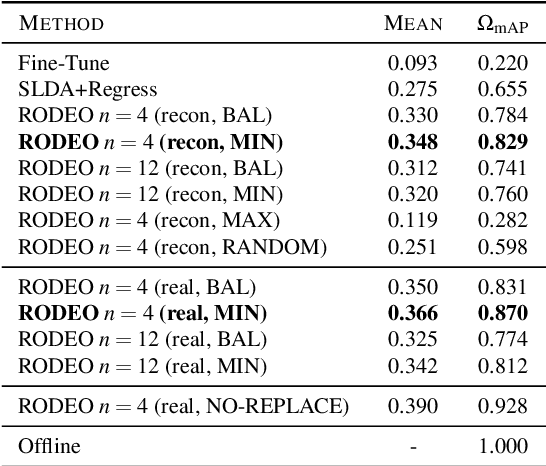
Humans can incrementally learn to do new visual detection tasks, which is a huge challenge for today's computer vision systems. Incrementally trained deep learning models lack backwards transfer to previously seen classes and suffer from a phenomenon known as $"catastrophic forgetting."$ In this paper, we pioneer online streaming learning for object detection, where an agent must learn examples one at a time with severe memory and computational constraints. In object detection, a system must output all bounding boxes for an image with the correct label. Unlike earlier work, the system described in this paper can learn this task in an online manner with new classes being introduced over time. We achieve this capability by using a novel memory replay mechanism that efficiently replays entire scenes. We achieve state-of-the-art results on both the PASCAL VOC 2007 and MS COCO datasets.
Do We Need Fully Connected Output Layers in Convolutional Networks?
Apr 29, 2020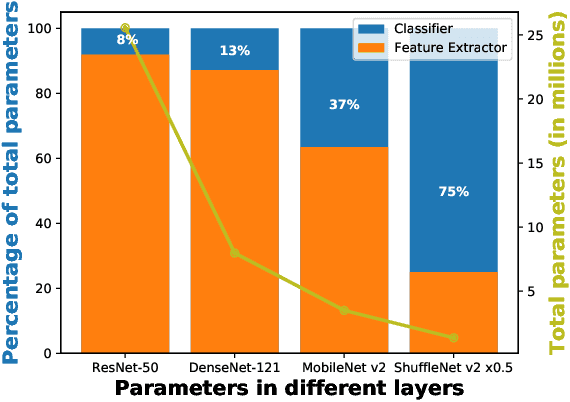
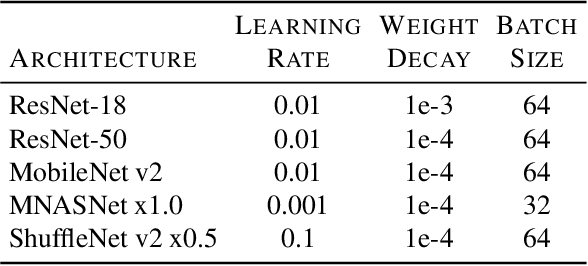
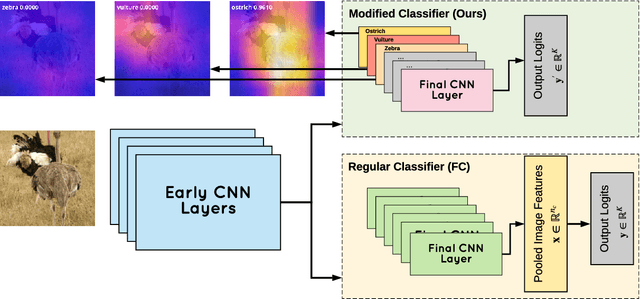
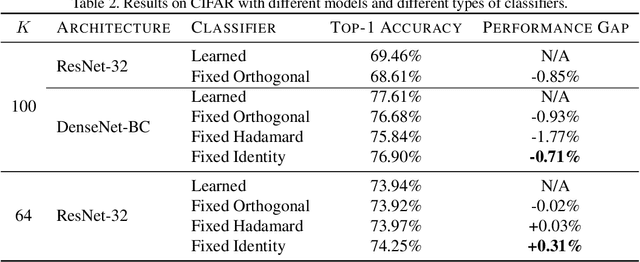
Traditionally, deep convolutional neural networks consist of a series of convolutional and pooling layers followed by one or more fully connected (FC) layers to perform the final classification. While this design has been successful, for datasets with a large number of categories, the fully connected layers often account for a large percentage of the network's parameters. For applications with memory constraints, such as mobile devices and embedded platforms, this is not ideal. Recently, a family of architectures that involve replacing the learned fully connected output layer with a fixed layer has been proposed as a way to achieve better efficiency. In this paper we examine this idea further and demonstrate that fixed classifiers offer no additional benefit compared to simply removing the output layer along with its parameters. We further demonstrate that the typical approach of having a fully connected final output layer is inefficient in terms of parameter count. We are able to achieve comparable performance to a traditionally learned fully connected classification output layer on the ImageNet-1K, CIFAR-100, Stanford Cars-196, and Oxford Flowers-102 datasets, while not having a fully connected output layer at all.
Are Out-of-Distribution Detection Methods Effective on Large-Scale Datasets?
Oct 30, 2019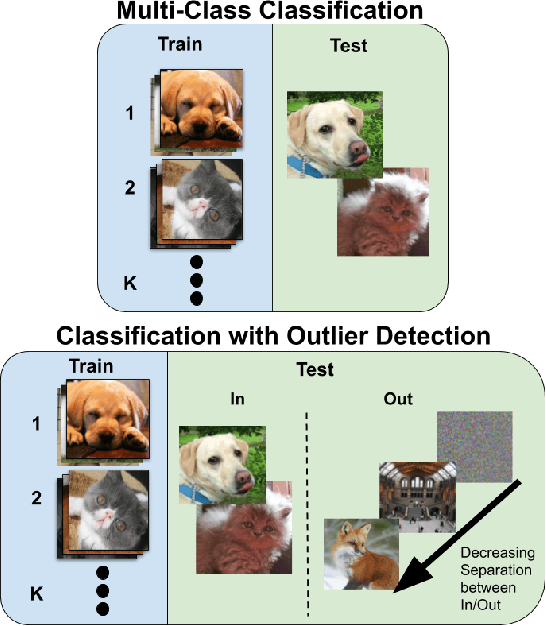
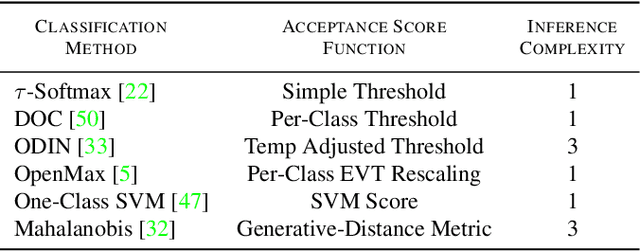
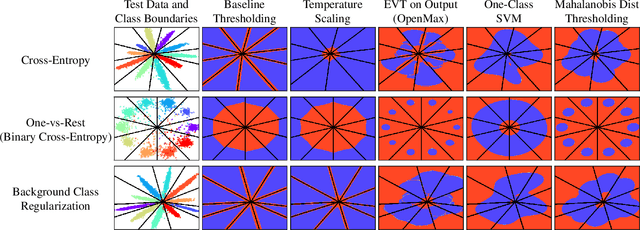
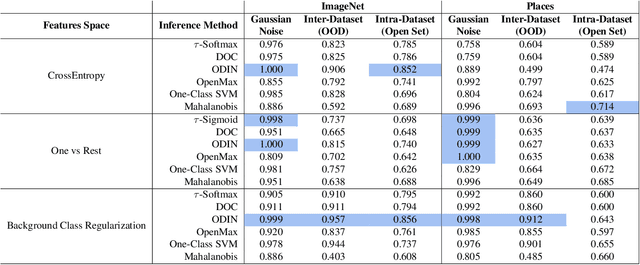
Supervised classification methods often assume the train and test data distributions are the same and that all classes in the test set are present in the training set. However, deployed classifiers often require the ability to recognize inputs from outside the training set as unknowns. This problem has been studied under multiple paradigms including out-of-distribution detection and open set recognition. For convolutional neural networks, there have been two major approaches: 1) inference methods to separate knowns from unknowns and 2) feature space regularization strategies to improve model robustness to outlier inputs. There has been little effort to explore the relationship between the two approaches and directly compare performance on anything other than small-scale datasets that have at most 100 categories. Using ImageNet-1K and Places-434, we identify novel combinations of regularization and specialized inference methods that perform best across multiple outlier detection problems of increasing difficulty level. We found that input perturbation and temperature scaling yield the best performance on large scale datasets regardless of the feature space regularization strategy. Improving the feature space by regularizing against a background class can be helpful if an appropriate background class can be found, but this is impractical for large scale image classification datasets.