 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Fatigue-Induced Compensatory Movements in Bicep Curls: Gaining Insights for the Deployment of Wearable Sensors
Feb 18, 2024



A common challenge in Bicep Curls rehabilitation is muscle compensation, where patients adopt alternative movement patterns when the primary muscle group cannot act due to injury or fatigue, significantly decreasing the effectiveness of rehabilitation efforts. The problem is exacerbated by the growing trend toward transitioning from in-clinic to home-based rehabilitation, where constant monitoring and correction by physiotherapists are limited. To address this challenge, developing wearable sensors capable of detecting muscle compensation becomes crucial. This study aims to gain insights for the optimal deployment of wearable sensors through a comprehensive study of muscle compensation in Bicep Curls. We collect upper limb joint kinematics and surface electromyography signals (sEMG) from eight muscles in 12 healthy subjects during standard and fatigue stages. Two muscle synergies are derived from sEMG signals and are analyzed comprehensively along with joint kinematics. Our findings reveal a shift in the relative contribution of forearm muscles to shoulder muscles, accompanied by a significant increase in activation amplitude for both synergies. Additionally, more pronounced movement was observed at the shoulder joint during fatigue. These results suggest focusing on the should muscle activities and joint motions when deploying wearable sensors for effective detection of compensatory movements.
Smart Textile-Driven Soft Spine Exosuit for Lifting Tasks in Industrial Applications
Feb 04, 2024Work related musculoskeletal disorders (WMSDs) are often caused by repetitive lifting, making them a significant concern in occupational health. Although wearable assist devices have become the norm for mitigating the risk of back pain, most spinal assist devices still possess a partially rigid structure that impacts the user comfort and flexibility. This paper addresses this issue by presenting a smart textile actuated spine assistance robotic exosuit (SARE), which can conform to the back seamlessly without impeding the user movement and is incredibly lightweight. The SARE can assist the human erector spinae to complete any action with virtually infinite degrees of freedom. To detect the strain on the spine and to control the smart textile automatically, a soft knitting sensor which utilizes fluid pressure as sensing element is used. The new device is validated experimentally with human subjects where it reduces peak electromyography (EMG) signals of lumbar erector spinae by around 32 percent in loaded and around 22 percent in unloaded conditions. Moreover, the integrated EMG decreased by around 24.2 percent under loaded condition and around 23.6 percent under unloaded condition. In summary, the artificial muscle wearable device represents an anatomical solution to reduce the risk of muscle strain, metabolic energy cost and back pain associated with repetitive lifting tasks.
Camera Frame Misalignment in a Teleoperated Eye-in-Hand Robot: Effects and a Simple Correction Method
May 18, 2021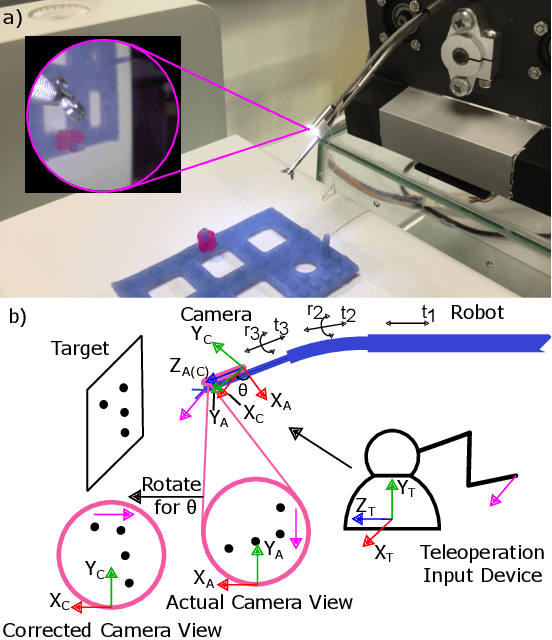
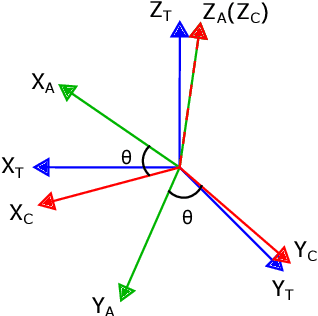
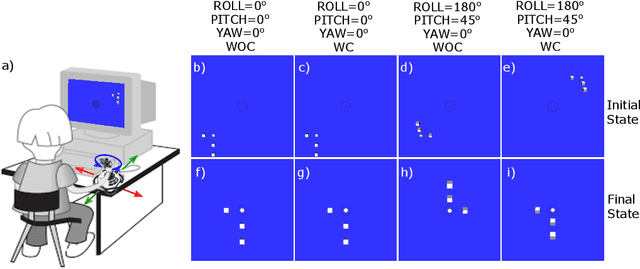
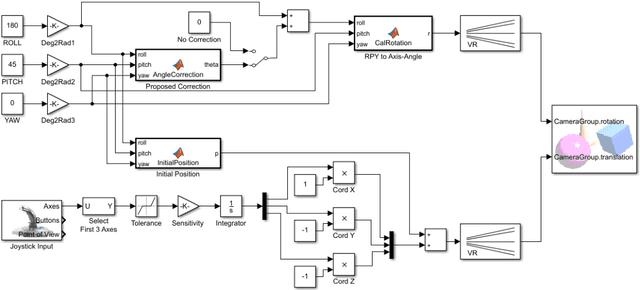
Misalignment between the camera frame and the operator frame is commonly seen in a teleoperated system and usually degrades the operation performance. The effects of such misalignment have not been fully investigated for eye-in-hand systems - systems that have the camera (eye) mounted to the end-effector (hand) to gain compactness in confined spaces such as in endoscopic surgery. This paper provides a systematic study on the effects of the camera frame misalignment in a teleoperated eye-in-hand robot and proposes a simple correction method in the view display. A simulation is designed to compare the effects of the misalignment under different conditions. Users are asked to move a rigid body from its initial position to the specified target position via teleoperation, with different levels of misalignment simulated. It is found that misalignment between the input motion and the output view is much more difficult to compensate by the operators when it is in the orthogonal direction (~40s) compared with the opposite direction (~20s). An experiment on a real concentric tube robot with an eye-in-hand configuration is also conducted. Users are asked to telemanipulate the robot to complete a pick-and-place task. Results show that with the correction enabled, there is a significant improvement in the operation performance in terms of completion time (mean 40.6%, median 38.6%), trajectory length (mean 34.3%, median 28.1%), difficulty (50.5%), unsteadiness (49.4%), and mental stress (60.9%).
Advanced Intelligent Systems for Surgical Robotics
Jan 02, 2020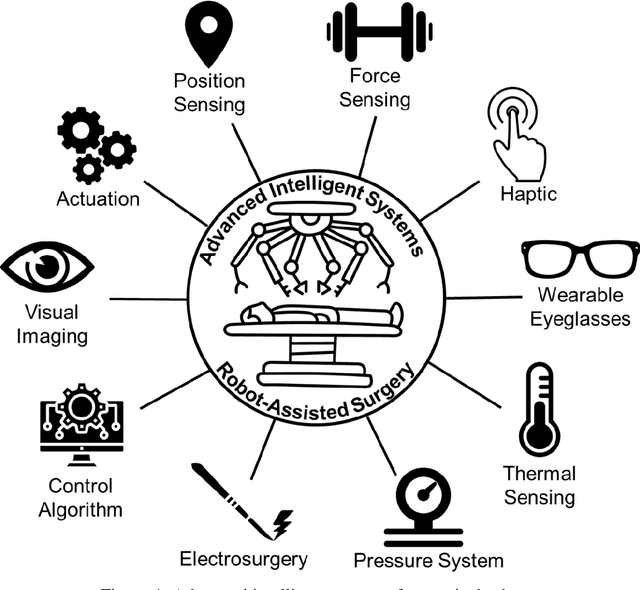
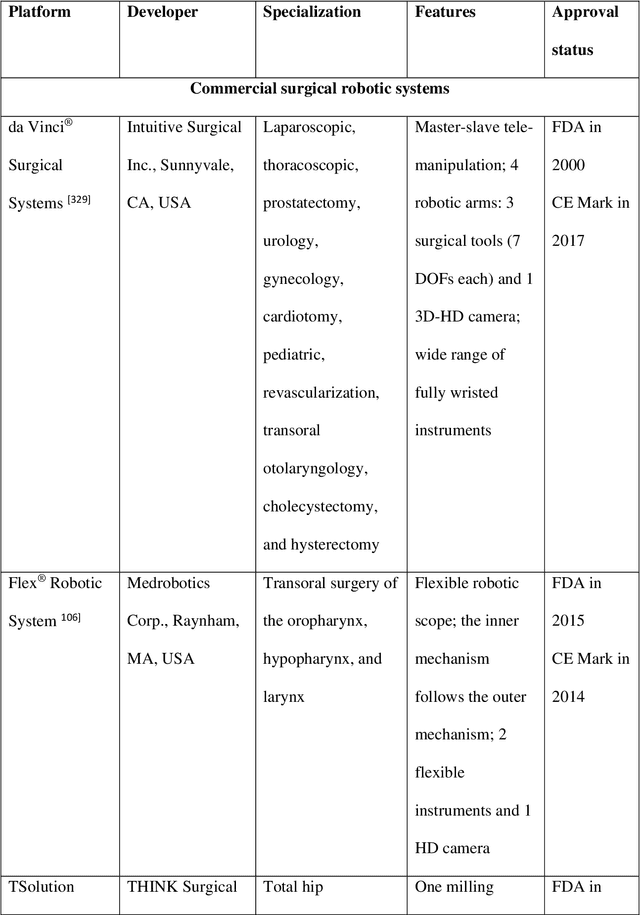
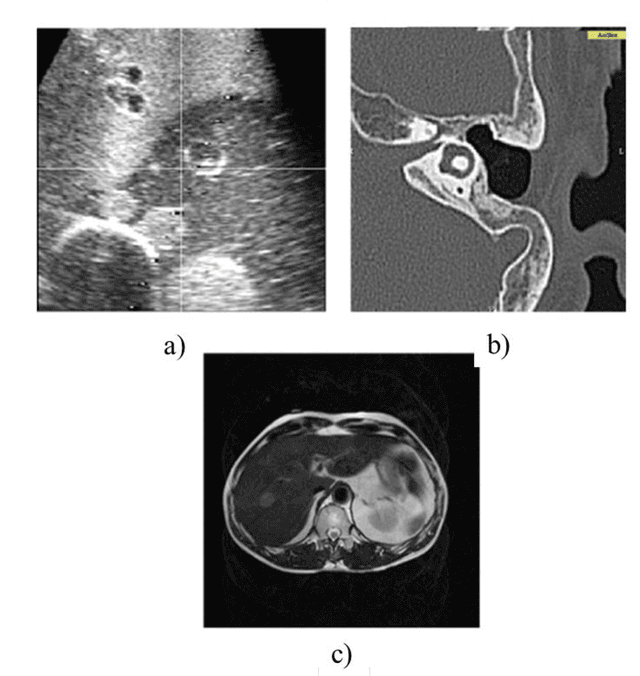
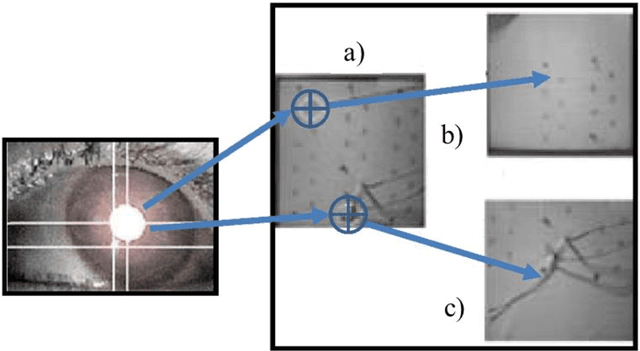
Surgical robots have had clinical use since the mid 1990s. Robot-assisted surgeries offer many benefits over the conventional approach including lower risk of infection and blood loss, shorter recovery, and an overall safer procedure for patients. The past few decades have shown many emerging surgical robotic platforms that can work in complex and confined channels of the internal human organs and improve the cognitive and physical skills of the surgeons during the operation. Advanced technologies for sensing, actuation, and intelligent control have enabled multiple surgical devices to simultaneously operate within the human body at low cost and with more efficiency. Despite advances, current surgical intervention systems are not able to execute autonomous tasks and make cognitive decisions that are analogous to that of humans. This paper will overview a historical development of surgery from conventional open to robotic-assisted approaches with discussion on the capabilities of advanced intelligent systems and devices that are currently implemented in existing surgical robotic systems. It will also revisit available autonomous surgical platforms with comments on the essential technologies, existing challenges, and suggestions for the future development of intelligent robotic-assisted surgical systems towards the achievement of fully autonomous operation.
Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics
Mar 19, 2019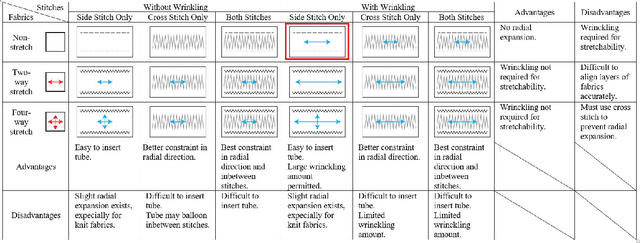
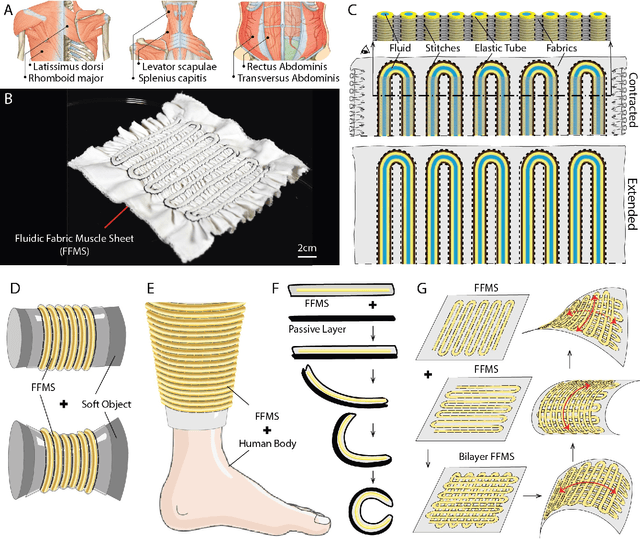
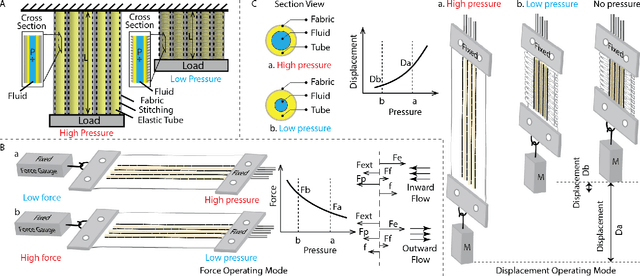
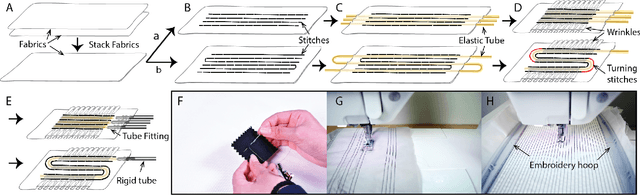
Conformable robotic systems are attractive for applications in which they can be used to actuate structures with large surface areas, to provide forces through wearable garments, or to realize autonomous robotic systems. We present a new family of soft actuators that we refer to as Fluidic Fabric Muscle Sheets (FFMS). They are composite fabric structures that integrate fluidic transmissions based on arrays of elastic tubes. These sheet-like actuators can strain, squeeze, bend, and conform to hard or soft objects of arbitrary shapes or sizes, including the human body. We show how to design and fabricate FFMS actuators via facile apparel engineering methods, including computerized sewing techniques. Together, these determine the distributions of stresses and strains that can be generated by the FFMS. We present a simple mathematical model that proves effective for predicting their performance. FFMS can operate at frequencies of 5 Hertz or more, achieve engineering strains exceeding 100%, and exert forces greater than 115 times their own weight. They can be safely used in intimate contact with the human body even when delivering stresses exceeding 10$^\text{6}$ Pascals. We demonstrate their versatility for actuating a variety of bodies or structures, and in configurations that perform multi-axis actuation, including bending and shape change. As we also show, FFMS can be used to exert forces on body tissues for wearable and biomedical applications. We demonstrate several potential use cases, including a miniature steerable robot, a glove for grasp assistance, garments for applying compression to the extremities, and devices for actuating small body regions or tissues via localized skin stretch.
Future of Flexible Robotic Endoscopy Systems
Mar 15, 2017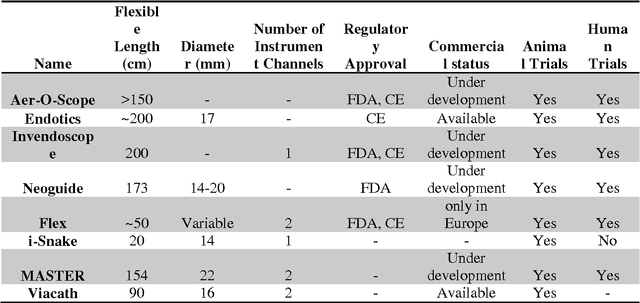

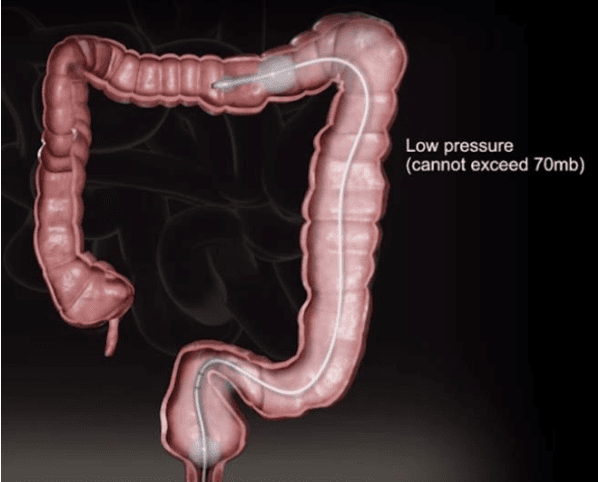
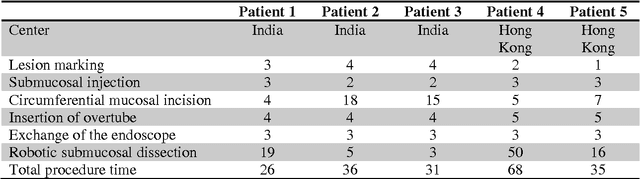
Robotics enables a variety of unconventional actuation strategies to be used for endoscopes, resulting in reduced trauma to the GI tract. For transmission of force to distally mounted endoscopic instruments, robotically actuated tendon sheath mechanisms are the current state of the art. Robotics in surgical endoscopy enables an ergonomic mapping of the surgeon movements to remotely controlled slave arms, facilitating tissue manipulation. The learning curve for difficult procedures such as endoscopic submucosal dissection and full-thickness resection can be significantly reduced. Improved surgical outcomes are also observed from clinical and pre-clinical trials. The technology behind master-slave surgical robotics will continue to mature, with the addition of position and force sensors enabling better control and tactile feedback. More robotic assisted GI luminal and NOTES surgeries are expected to be conducted in future, and gastroenterologists will have a key collaborative role to play.
Performance Control of Tendon-Driven Endoscopic Surgical Robots With Friction and Hysteresis
Feb 06, 2017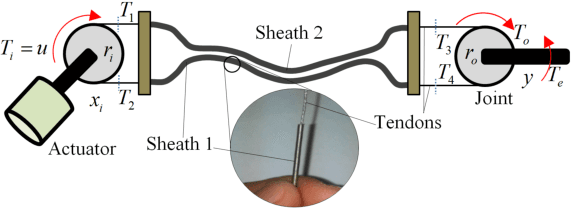
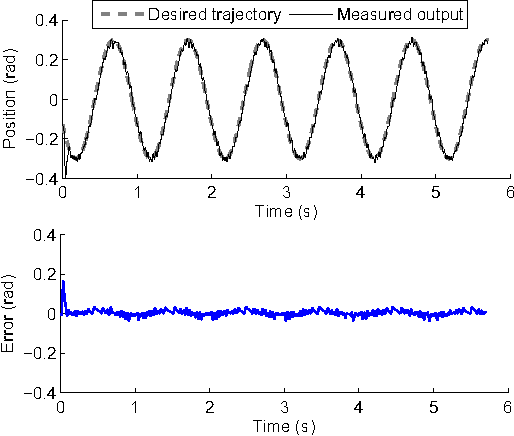
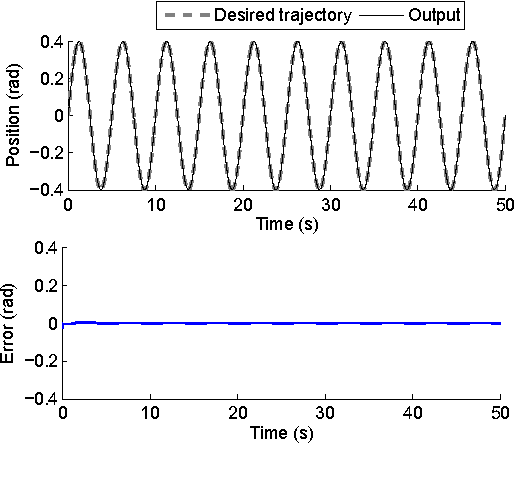
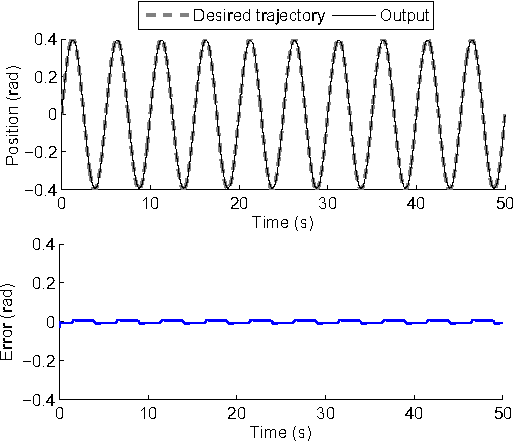
In this study, a new position control scheme for the tendon-sheath mechanism (TSM) which is used in flexible medical devices is presented. TSM is widely used in dexterous robotic applications because it can flexibly work in limited space, in constrained environments, and provides efficient power transmission from the external actuator to the distal joint. However, nonlinearities from friction and backlash hysteresis between the tendon and the sheath pose challenges in achieving precise position controls of the end effector. Previous studies on the TSM only address the control problem under the assumptions of known tendon-sheath configuration and known model parameters of the backlash hysteresis nonlinearity. These approaches can have adverse impact and limitations on the overall system performances and practical implementation. This paper presents a new approach to model and control the TSM-driven flexible robotic systems. The designed controller does not require exact knowledge of nonlinear friction and backlash hysteresis parameters, only their bounds are online estimated. Simulation and experimental validation results show that the proposed control scheme can significantly improve the tracking performances without the presence of the exact knowledge of the model parameters and the sheath configuration.