 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedVideoMAE: Efficient Privacy-Preserving Federated Video Moderation
Dec 21, 2025



The rapid growth of short-form video platforms increases the need for privacy-preserving moderation, as cloud-based pipelines expose raw videos to privacy risks, high bandwidth costs, and inference latency. To address these challenges, we propose an on-device federated learning framework for video violence detection that integrates self-supervised VideoMAE representations, LoRA-based parameter-efficient adaptation, and defense-in-depth privacy protection. Our approach reduces the trainable parameter count to 5.5M (~3.5% of a 156M backbone) and incorporates DP-SGD with configurable privacy budgets and secure aggregation. Experiments on RWF-2000 with 40 clients achieve 77.25% accuracy without privacy protection and 65-66% under strong differential privacy, while reducing communication cost by $28.3\times$ compared to full-model federated learning. The code is available at: {https://github.com/zyt-599/FedVideoMAE}
A Multi-Drone Multi-View Dataset and Deep Learning Framework for Pedestrian Detection and Tracking
Nov 06, 2025Multi-drone surveillance systems offer enhanced coverage and robustness for pedestrian tracking, yet existing approaches struggle with dynamic camera positions and complex occlusions. This paper introduces MATRIX (Multi-Aerial TRacking In compleX environments), a comprehensive dataset featuring synchronized footage from eight drones with continuously changing positions, and a novel deep learning framework for multi-view detection and tracking. Unlike existing datasets that rely on static cameras or limited drone coverage, MATRIX provides a challenging scenario with 40 pedestrians and a significant architectural obstruction in an urban environment. Our framework addresses the unique challenges of dynamic drone-based surveillance through real-time camera calibration, feature-based image registration, and multi-view feature fusion in bird's-eye-view (BEV) representation. Experimental results demonstrate that while static camera methods maintain over 90\% detection and tracking precision and accuracy metrics in a simplified MATRIX environment without an obstruction, 10 pedestrians and a much smaller observational area, their performance significantly degrades in the complex environment. Our proposed approach maintains robust performance with $\sim$90\% detection and tracking accuracy, as well as successfully tracks $\sim$80\% of trajectories under challenging conditions. Transfer learning experiments reveal strong generalization capabilities, with the pretrained model achieving much higher detection and tracking accuracy performance compared to training the model from scratch. Additionally, systematic camera dropout experiments reveal graceful performance degradation, demonstrating practical robustness for real-world deployments where camera failures may occur. The MATRIX dataset and framework provide essential benchmarks for advancing dynamic multi-view surveillance systems.
Wireless Resource Allocation with Collaborative Distributed and Centralized DRL under Control Channel Attacks
Nov 16, 2024



In this paper, we consider a wireless resource allocation problem in a cyber-physical system (CPS) where the control channel, carrying resource allocation commands, is subjected to denial-of-service (DoS) attacks. We propose a novel concept of collaborative distributed and centralized (CDC) resource allocation to effectively mitigate the impact of these attacks. To optimize the CDC resource allocation policy, we develop a new CDC-deep reinforcement learning (DRL) algorithm, whereas existing DRL frameworks only formulate either centralized or distributed decision-making problems. Simulation results demonstrate that the CDC-DRL algorithm significantly outperforms state-of-the-art DRL benchmarks, showcasing its ability to address resource allocation problems in large-scale CPSs under control channel attacks.
Resource-Efficient Multiview Perception: Integrating Semantic Masking with Masked Autoencoders
Oct 07, 2024



Multiview systems have become a key technology in modern computer vision, offering advanced capabilities in scene understanding and analysis. However, these systems face critical challenges in bandwidth limitations and computational constraints, particularly for resource-limited camera nodes like drones. This paper presents a novel approach for communication-efficient distributed multiview detection and tracking using masked autoencoders (MAEs). We introduce a semantic-guided masking strategy that leverages pre-trained segmentation models and a tunable power function to prioritize informative image regions. This approach, combined with an MAE, reduces communication overhead while preserving essential visual information. We evaluate our method on both virtual and real-world multiview datasets, demonstrating comparable performance in terms of detection and tracking performance metrics compared to state-of-the-art techniques, even at high masking ratios. Our selective masking algorithm outperforms random masking, maintaining higher accuracy and precision as the masking ratio increases. Furthermore, our approach achieves a significant reduction in transmission data volume compared to baseline methods, thereby balancing multiview tracking performance with communication efficiency.
Machine Learning-Based Early Detection of IoT Botnets Using Network-Edge Traffic
Oct 22, 2020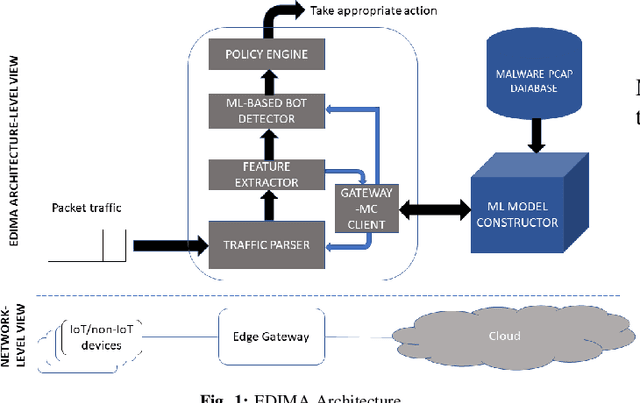

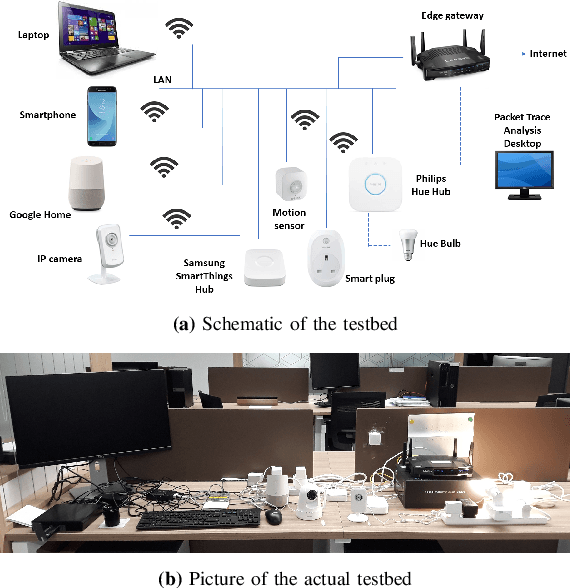
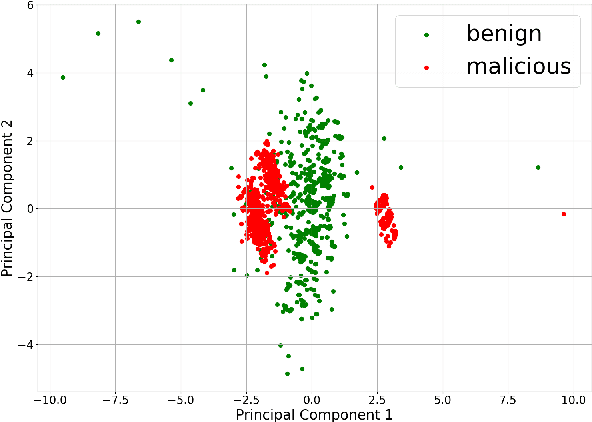
In this work, we present a lightweight IoT botnet detection solution, EDIMA, which is designed to be deployed at the edge gateway installed in home networks and targets early detection of botnets prior to the launch of an attack. EDIMA includes a novel two-stage Machine Learning (ML)-based detector developed specifically for IoT bot detection at the edge gateway. The ML-based bot detector first employs ML algorithms for aggregate traffic classification and subsequently Autocorrelation Function (ACF)-based tests to detect individual bots. The EDIMA architecture also comprises a malware traffic database, a policy engine, a feature extractor and a traffic parser. Performance evaluation results show that EDIMA achieves high bot scanning and bot-CnC traffic detection accuracies with very low false positive rates. The detection performance is also shown to be robust to an increase in the number of IoT devices connected to the edge gateway where EDIMA is deployed. Further, the runtime performance analysis of a Python implementation of EDIMA deployed on a Raspberry Pi reveals low bot detection delays and low RAM consumption. EDIMA is also shown to outperform existing detection techniques for bot scanning traffic and bot-CnC server communication.