 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRACE: GRaph-based Addiction Care prEdiction
Oct 23, 2025Determining the appropriate locus of care for addiction patients is one of the most critical clinical decisions that affects patient treatment outcomes and effective use of resources. With a lack of sufficient specialized treatment resources, such as inpatient beds or staff, there is an unmet need to develop an automated framework for the same. Current decision-making approaches suffer from severe class imbalances in addiction datasets. To address this limitation, we propose a novel graph neural network (GRACE) framework that formalizes locus of care prediction as a structured learning problem. Further, we perform extensive feature engineering and propose a new approach of obtaining an unbiased meta-graph to train a GNN to overcome the class imbalance problem. Experimental results in real-world data show an improvement of 11-35% in terms of the F1 score of the minority class over competitive baselines. The codes and note embeddings are available at https://anonymous.4open.science/r/GRACE-F8E1/.
newsSweeper at SemEval-2020 Task 11: Context-Aware Rich Feature Representations For Propaganda Classification
Jul 21, 2020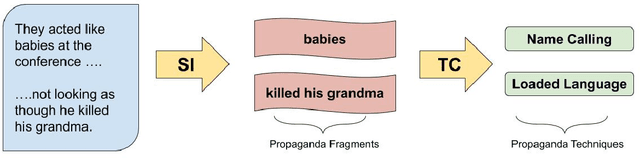
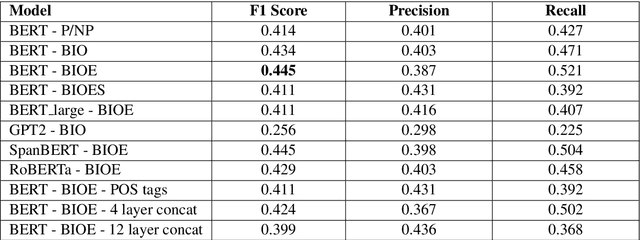


This paper describes our submissions to SemEval 2020 Task 11: Detection of Propaganda Techniques in News Articles for each of the two subtasks of Span Identification and Technique Classification. We make use of pre-trained BERT language model enhanced with tagging techniques developed for the task of Named Entity Recognition (NER), to develop a system for identifying propaganda spans in the text. For the second subtask, we incorporate contextual features in a pre-trained RoBERTa model for the classification of propaganda techniques. We were ranked 5th in the propaganda technique classification subtask.
Can I teach a robot to replicate a line art
Oct 17, 2019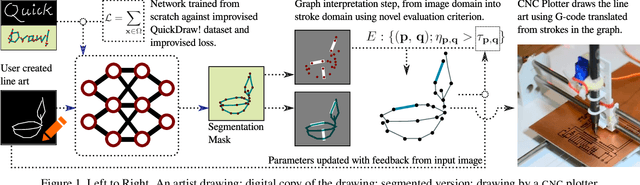
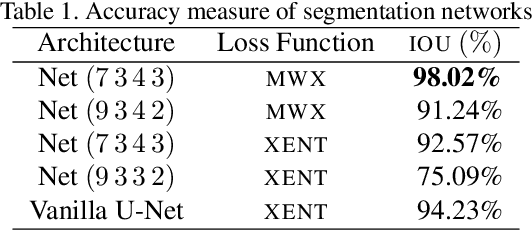
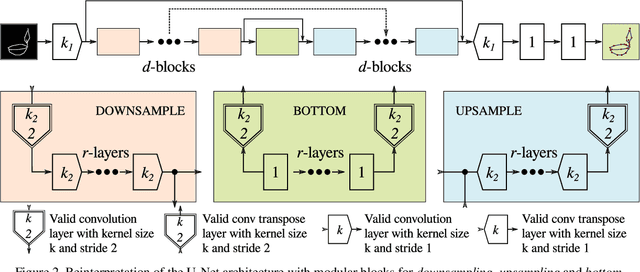
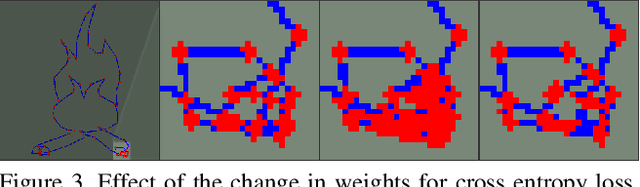
Line art is arguably one of the fundamental and versatile modes of expression. We propose a pipeline for a robot to look at a grayscale line art and redraw it. The key novel elements of our pipeline are: a) we propose a novel task of mimicking line drawings, b) to solve the pipeline we modify the Quick-draw dataset to obtain supervised training for converting a line drawing into a series of strokes c) we propose a multi-stage segmentation and graph interpretation pipeline for solving the problem. The resultant method has also been deployed on a CNC plotter as well as a robotic arm. We have trained several variations of the proposed methods and evaluate these on a dataset obtained from Quick-draw. Through the best methods we observe an accuracy of around 98% for this task, which is a significant improvement over the baseline architecture we adapted from. This therefore allows for deployment of the method on robots for replicating line art in a reliable manner. We also show that while the rule-based vectorization methods do suffice for simple drawings, it fails for more complicated sketches, unlike our method which generalizes well to more complicated distributions.