 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Understanding of Sketches
Apr 13, 2022
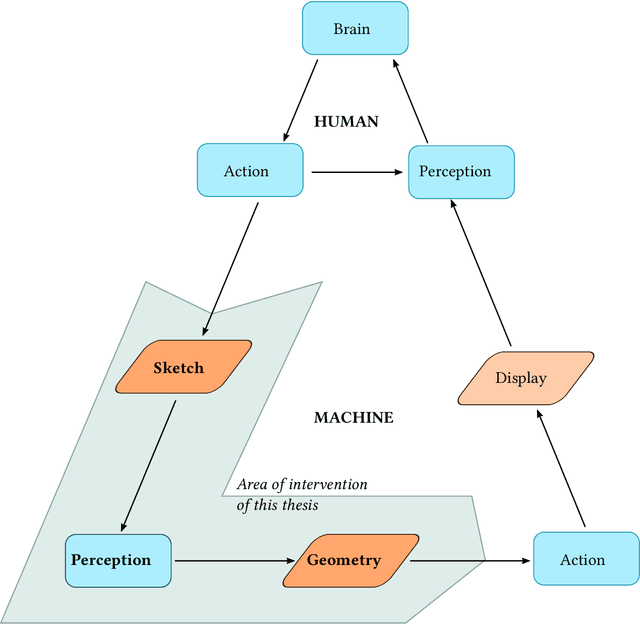
Sketching is used as a ubiquitous tool of expression by novices and experts alike. In this thesis I explore two methods that help a system provide a geometric machine-understanding of sketches, and in-turn help a user accomplish a downstream task. The first work deals with interpretation of a 2D-line drawing as a graph structure, and also illustrates its effectiveness through its physical reconstruction by a robot. We setup a two-step pipeline to solve the problem. Formerly, we estimate the vertices of the graph with sub-pixel level accuracy. We achieve this using a combination of deep convolutional neural networks learned under a supervised setting for pixel-level estimation followed by the connected component analysis for clustering. Later we follow it up with a feedback-loop-based edge estimation method. To complement the graph-interpretation, we further perform data-interchange to a robot legible ASCII format, and thus teach a robot to replicate a line drawing. In the second work, we test the 3D-geometric understanding of a sketch-based system without explicit access to the information about 3D-geometry. The objective is to complete a contour-like sketch of a 3D-object, with illumination and texture information. We propose a data-driven approach to learn a conditional distribution modelled as deep convolutional neural networks to be trained under an adversarial setting; and we validate it against a human-in-the-loop. The method itself is further supported by synthetic data generation using constructive solid geometry following a standard graphics pipeline. In order to validate the efficacy of our method, we design a user-interface plugged into a popular sketch-based workflow, and setup a simple task-based exercise, for an artist. Thereafter, we also discover that form-exploration is an additional utility of our application.
Can I teach a robot to replicate a line art
Oct 17, 2019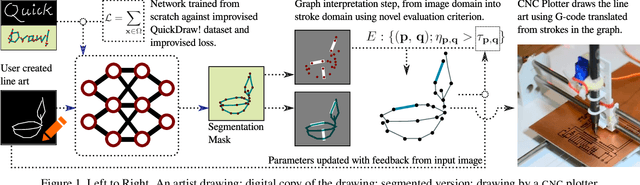
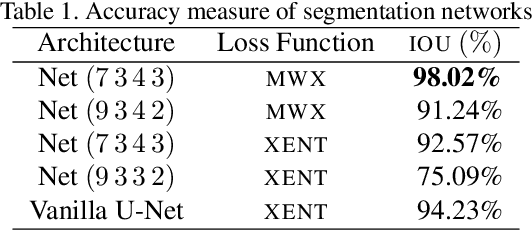
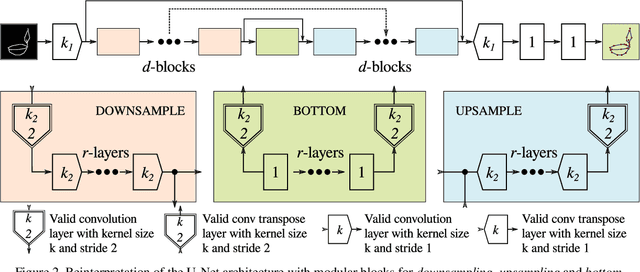
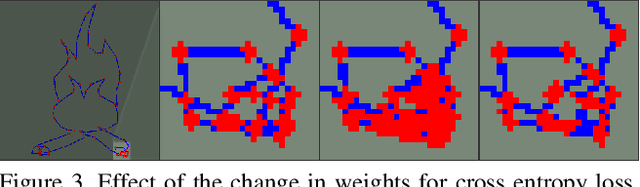
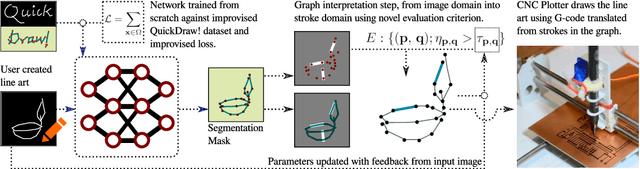
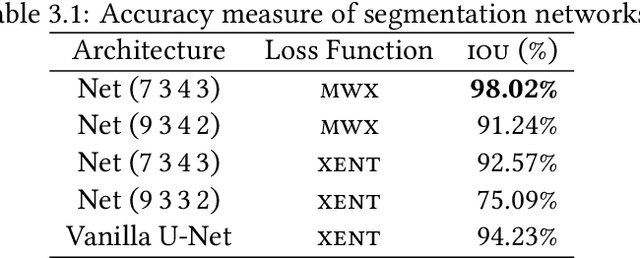
Line art is arguably one of the fundamental and versatile modes of expression. We propose a pipeline for a robot to look at a grayscale line art and redraw it. The key novel elements of our pipeline are: a) we propose a novel task of mimicking line drawings, b) to solve the pipeline we modify the Quick-draw dataset to obtain supervised training for converting a line drawing into a series of strokes c) we propose a multi-stage segmentation and graph interpretation pipeline for solving the problem. The resultant method has also been deployed on a CNC plotter as well as a robotic arm. We have trained several variations of the proposed methods and evaluate these on a dataset obtained from Quick-draw. Through the best methods we observe an accuracy of around 98% for this task, which is a significant improvement over the baseline architecture we adapted from. This therefore allows for deployment of the method on robots for replicating line art in a reliable manner. We also show that while the rule-based vectorization methods do suffice for simple drawings, it fails for more complicated sketches, unlike our method which generalizes well to more complicated distributions.