 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Monosemanticity: Extracting Interpretable Features from Claude 3 Sonnet
May 28, 2026We demonstrate that sparse autoencoders can extract interpretable features from Claude 3 Sonnet, a production-scale language model, addressing the open question of whether dictionary learning methods scale beyond small transformers. We trained sparse autoencoders with up to 34 million features on the model's middle layer residual stream, using scaling laws to guide hyperparameter selection. The resulting features are multilingual and multimodal (generalizing to images despite text-only training), respond to both concrete instances and abstract discussions of concepts, and can be used to steer model behavior in ways consistent with their interpretations. We find features corresponding to famous entities and locations, as well as more abstract concepts like sarcasm or errors in code. We also identify features relevant to ways in which language models might cause harm--including features representing deception, power-seeking, sycophancy, and bias--and show that these causally influence model outputs when manipulated. Additionally, we conduct analyses of feature interpretability, geometry, and computational function. However, significant limitations remain: our suite of features is incomplete, and we lack rigorous methods for evaluating whether our features faithfully capture model computations.
Constitutional AI: Harmlessness from AI Feedback
Dec 15, 2022



As AI systems become more capable, we would like to enlist their help to supervise other AIs. We experiment with methods for training a harmless AI assistant through self-improvement, without any human labels identifying harmful outputs. The only human oversight is provided through a list of rules or principles, and so we refer to the method as 'Constitutional AI'. The process involves both a supervised learning and a reinforcement learning phase. In the supervised phase we sample from an initial model, then generate self-critiques and revisions, and then finetune the original model on revised responses. In the RL phase, we sample from the finetuned model, use a model to evaluate which of the two samples is better, and then train a preference model from this dataset of AI preferences. We then train with RL using the preference model as the reward signal, i.e. we use 'RL from AI Feedback' (RLAIF). As a result we are able to train a harmless but non-evasive AI assistant that engages with harmful queries by explaining its objections to them. Both the SL and RL methods can leverage chain-of-thought style reasoning to improve the human-judged performance and transparency of AI decision making. These methods make it possible to control AI behavior more precisely and with far fewer human labels.
In-context Learning and Induction Heads
Sep 24, 2022"Induction heads" are attention heads that implement a simple algorithm to complete token sequences like [A][B] ... [A] -> [B]. In this work, we present preliminary and indirect evidence for a hypothesis that induction heads might constitute the mechanism for the majority of all "in-context learning" in large transformer models (i.e. decreasing loss at increasing token indices). We find that induction heads develop at precisely the same point as a sudden sharp increase in in-context learning ability, visible as a bump in the training loss. We present six complementary lines of evidence, arguing that induction heads may be the mechanistic source of general in-context learning in transformer models of any size. For small attention-only models, we present strong, causal evidence; for larger models with MLPs, we present correlational evidence.
Language Models (Mostly) Know What They Know
Jul 16, 2022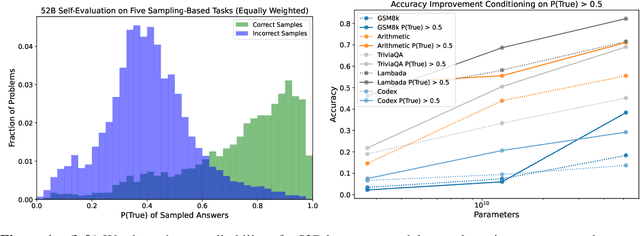
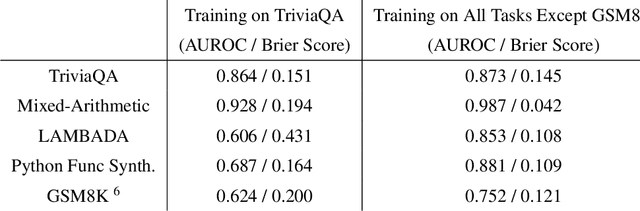
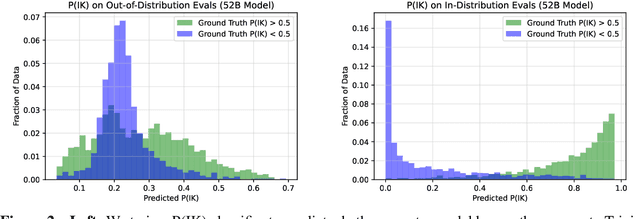

We study whether language models can evaluate the validity of their own claims and predict which questions they will be able to answer correctly. We first show that larger models are well-calibrated on diverse multiple choice and true/false questions when they are provided in the right format. Thus we can approach self-evaluation on open-ended sampling tasks by asking models to first propose answers, and then to evaluate the probability "P(True)" that their answers are correct. We find encouraging performance, calibration, and scaling for P(True) on a diverse array of tasks. Performance at self-evaluation further improves when we allow models to consider many of their own samples before predicting the validity of one specific possibility. Next, we investigate whether models can be trained to predict "P(IK)", the probability that "I know" the answer to a question, without reference to any particular proposed answer. Models perform well at predicting P(IK) and partially generalize across tasks, though they struggle with calibration of P(IK) on new tasks. The predicted P(IK) probabilities also increase appropriately in the presence of relevant source materials in the context, and in the presence of hints towards the solution of mathematical word problems. We hope these observations lay the groundwork for training more honest models, and for investigating how honesty generalizes to cases where models are trained on objectives other than the imitation of human writing.
Scaling Laws and Interpretability of Learning from Repeated Data
May 21, 2022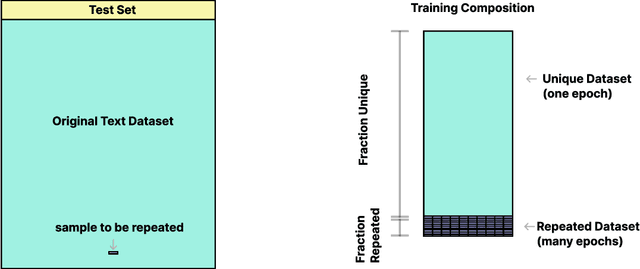
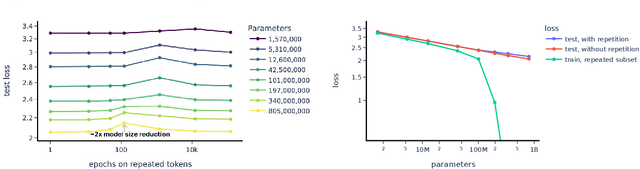
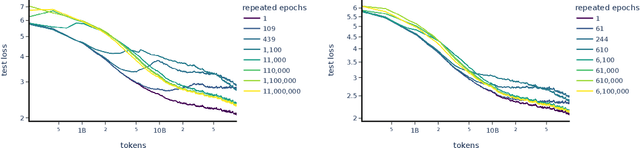
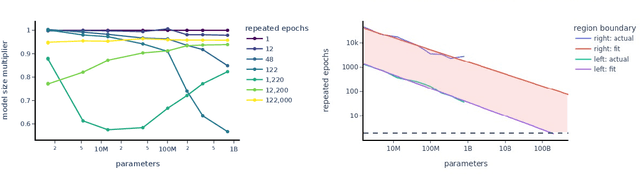
Recent large language models have been trained on vast datasets, but also often on repeated data, either intentionally for the purpose of upweighting higher quality data, or unintentionally because data deduplication is not perfect and the model is exposed to repeated data at the sentence, paragraph, or document level. Some works have reported substantial negative performance effects of this repeated data. In this paper we attempt to study repeated data systematically and to understand its effects mechanistically. To do this, we train a family of models where most of the data is unique but a small fraction of it is repeated many times. We find a strong double descent phenomenon, in which repeated data can lead test loss to increase midway through training. A predictable range of repetition frequency leads to surprisingly severe degradation in performance. For instance, performance of an 800M parameter model can be degraded to that of a 2x smaller model (400M params) by repeating 0.1% of the data 100 times, despite the other 90% of the training tokens remaining unique. We suspect there is a range in the middle where the data can be memorized and doing so consumes a large fraction of the model's capacity, and this may be where the peak of degradation occurs. Finally, we connect these observations to recent mechanistic interpretability work - attempting to reverse engineer the detailed computations performed by the model - by showing that data repetition disproportionately damages copying and internal structures associated with generalization, such as induction heads, providing a possible mechanism for the shift from generalization to memorization. Taken together, these results provide a hypothesis for why repeating a relatively small fraction of data in large language models could lead to disproportionately large harms to performance.
Training a Helpful and Harmless Assistant with Reinforcement Learning from Human Feedback
Apr 12, 2022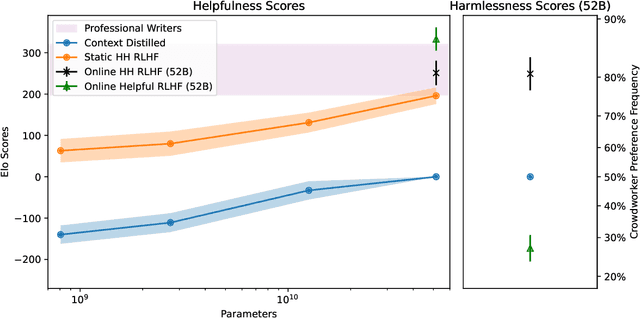
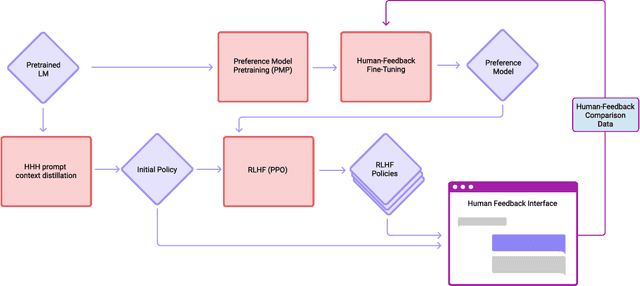
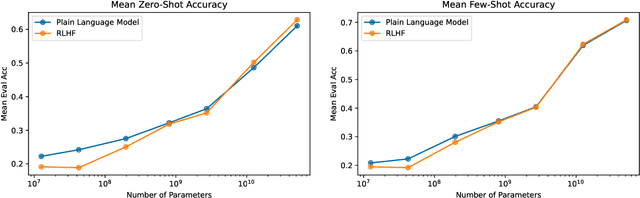
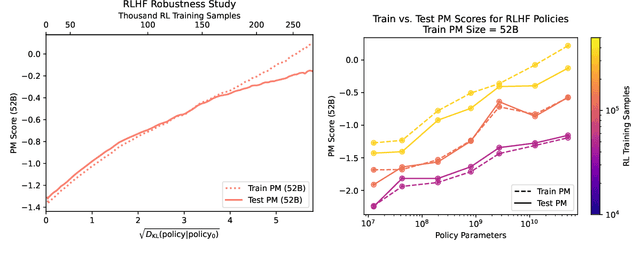
We apply preference modeling and reinforcement learning from human feedback (RLHF) to finetune language models to act as helpful and harmless assistants. We find this alignment training improves performance on almost all NLP evaluations, and is fully compatible with training for specialized skills such as python coding and summarization. We explore an iterated online mode of training, where preference models and RL policies are updated on a weekly cadence with fresh human feedback data, efficiently improving our datasets and models. Finally, we investigate the robustness of RLHF training, and identify a roughly linear relation between the RL reward and the square root of the KL divergence between the policy and its initialization. Alongside our main results, we perform peripheral analyses on calibration, competing objectives, and the use of OOD detection, compare our models with human writers, and provide samples from our models using prompts appearing in recent related work.