 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantitative Outcome-Oriented Assessment of Microsurgical Anastomosis
Aug 26, 2025



Microsurgical anastomosis demands exceptional dexterity and visuospatial skills, underscoring the importance of comprehensive training and precise outcome assessment. Currently, methods such as the outcome-oriented anastomosis lapse index are used to evaluate this procedure. However, they often rely on subjective judgment, which can introduce biases that affect the reliability and efficiency of the assessment of competence. Leveraging three datasets from hospitals with participants at various levels, we introduce a quantitative framework that uses image-processing techniques for objective assessment of microsurgical anastomoses. The approach uses geometric modeling of errors along with a detection and scoring mechanism, enhancing the efficiency and reliability of microsurgical proficiency assessment and advancing training protocols. The results show that the geometric metrics effectively replicate expert raters' scoring for the errors considered in this work.
Quantitative Physical Ergonomics Assessment of Teleoperation Interfaces
May 20, 2021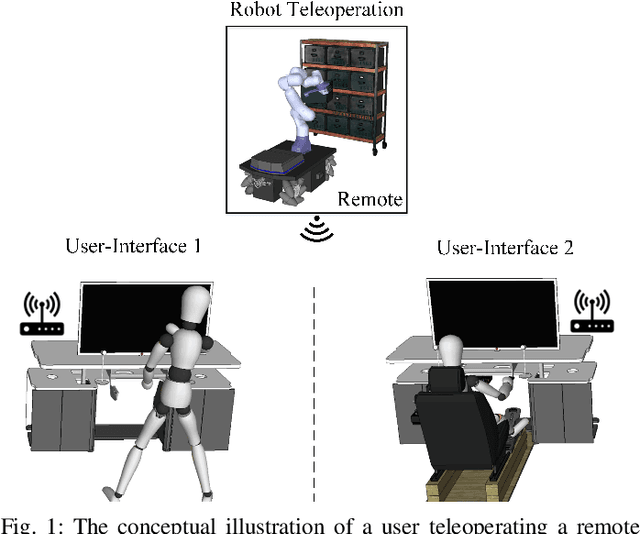
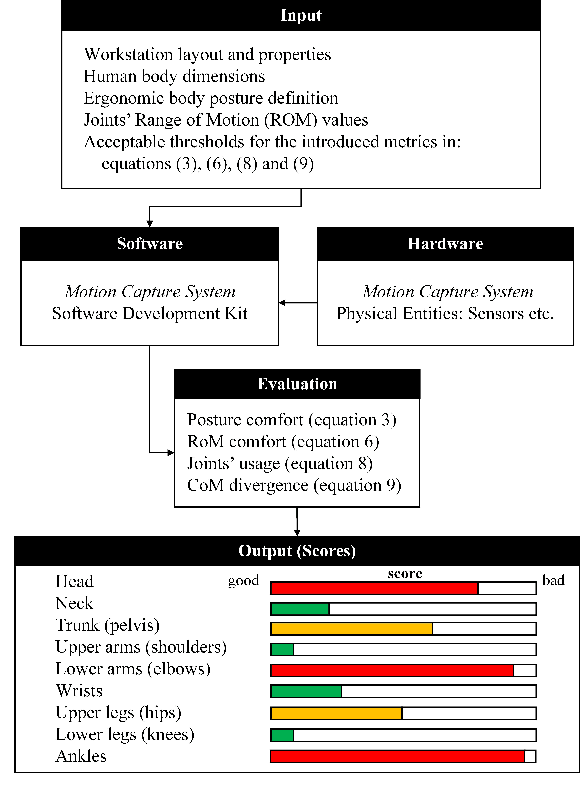
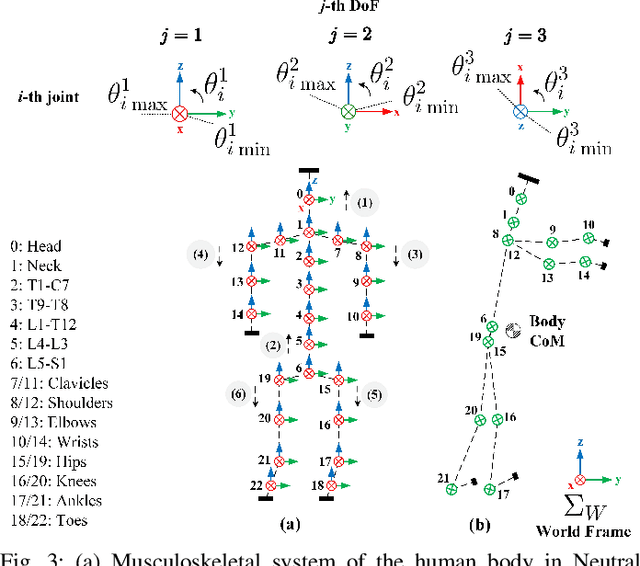
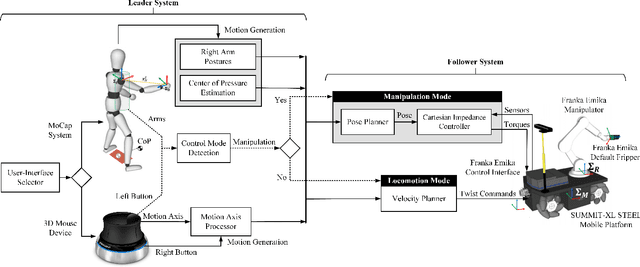
Human factors and ergonomics are the essential constituents of teleoperation interfaces, which can significantly affect the human operator's performance. Thus, a quantitative evaluation of these elements and the ability to establish reliable comparison bases for different teleoperation interfaces are the keys to select the most suitable one for a particular application. However, most of the works on teleoperation have so far focused on the stability analysis and the transparency improvement of these systems, and do not cover the important usability aspects. In this work, we propose a foundation to build a general framework for the analysis of human factors and ergonomics in employing diverse teleoperation interfaces. The proposed framework will go beyond the traditional subjective analyses of usability by complementing it with online measurements of the human body configurations. As a result, multiple quantitative metrics such as joints' usage, range of motion comfort, center of mass divergence, and posture comfort are introduced. To demonstrate the potential of the proposed framework, two different teleoperation interfaces are considered, and real-world experiments with eleven participants performing a simulated industrial remote pick-and-place task are conducted. The quantitative results of this analysis are provided, and compared with subjective questionnaires, illustrating the effectiveness of the proposed framework.